基于PC-Interface的机器人拆卸操作仿真研究
2018-03-30,,,
,,,
(1.苏州大学机电工程学院,江苏 苏州 215021;2.常熟理工学院机械工程学院,江苏 常熟 215500;3.江苏省机电产品循环利用技术重点建设实验室,江苏 常熟 215500;4.苏州市汽车绿色拆解回收利用智能装备技术重点实验室,江苏 常熟 215500)
0 引言
随着我国工业化程度的提高和经济快速发展,生产和生活的废弃物也大量增加,资源的短缺和环境的恶化直接影响到社会的可持续发展。所以坚持节约资源的基本国策,发展再生资源回收加工利用产业,具有重要的现实意义[1]。
我国废旧产品的拆解工作才刚刚起步,存在着拆解工具落后、拆解手段原始、污染环境等问题[2]。随着劳动力成本的不断增加,传统的拆卸模式会逐渐被淘汰。在此基础上,提出使用机器人代替人工拆卸,不但可提高废旧产品的处理效率、减轻工人的劳动强度、提高有价值工件的回收率,在形成一定量的规模后,还能降低废旧产品的拆卸回收成本。
国内外对此也有许多的相关研究。新南威尔士大学、阿利坎特大学都对基于工业机器人的废旧产品拆卸进行了相关的理论和技术研究[3-4]。德国柏林工业大学对制造过程中的运动和人体工程学进行了研究,通过所获得的信息反过来指导和帮助工人,降低劳动强度,劳动成本和减少生产错误[5]。
南京航空航天大学的刘清波将机器人应用于报废汽车处理过程,提出了虚拟环境下研究报废汽车拆解和机器人动作仿真的方法[6]。但其整个系统比较臃肿,不具有灵活性。燕山大学的李海龙以ABB IRB1410型串联机器人作为执行机构,配合高清工业摄像机和六维力传感器开发了软件集成控制系统,并针对装配作业中的花键轴与花键套装配任务进行了实验,验证了柔顺装配系统的可行性、有效性[7]。浙江大学的吴涛研究了工业机器人应用于切削加工的离线编程技术,开发了IRB6600型机器人切削加工离线编程软件,主要包括代码转换模块和机器人运动学仿真模块,同时研究了机器人切削加工轨迹的位姿校正方法,并验证了离线编程方法和各功能模块的正确性[8]。
在此,采用了瑞士ABB公司生产的工业机器人作为废旧产品拆卸的执行机构,以废旧的铅酸蓄电池为拆卸对象,实现了用机器人代替手工的拆卸工作,并通过RobotStudio软件对整个拆卸过程进行仿真,验证了本次研究的合理性和可行性。
1 废旧产品机器人拆卸的总体方案
为了获取每个铅酸蓄电池中铅板的位置信息,以及方便机器抓手抓取铅板,在工作开始之前,会预先将废旧铅酸蓄电池的上盖分离开。这样,工控机通过Kinect视觉设备,可以准确地获得每块铅板的具体位置信息。配合机器人夹具的尺寸信息和夹取的姿态信息,计算出每块铅板的夹取位置坐标,再选取几个适当的无干涉中转点,就可以规划出每块铅板的移出路径。将路径信息发送给机器人控制器,就可以精确控制机器人将每块铅板按照指定的路径夹取移出到指定位置的容器中。拆卸方案如图1所示。
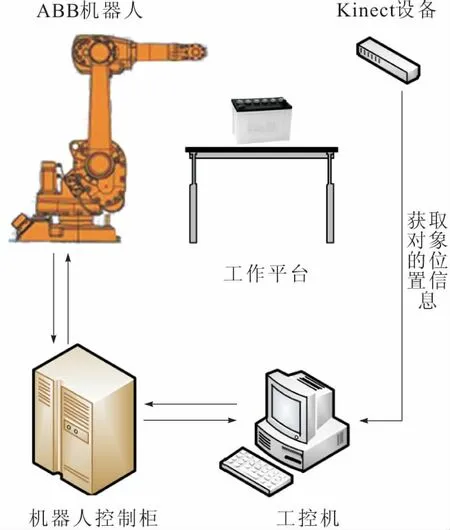
图1 废旧产品机器人拆卸方案
本次研究采用了ABB公司的型号为IRB1600机器人,它是目前使用率比较高的标准的多关节串联机器人,在自动化生产中发挥着重要作用。其独特的结构能够适应各种拆卸、焊接、物料搬运、装配、喷涂、精加工、拾料和货盘堆垛等工作。它的承载能力为10 kg,工作范围能够达到 1.45 m,具有6个驱动关节,具备高精度、易操作和多功能等特点,比较合适本次研究工作。
IRC 5 控制器是 ABB独有的适用于机器人工作站的集成控制柜,它具有优异的运动控制能力,并配有用于人机交互的FlexPendant示教器,使用了高度灵活的RAPID语言作为机器编程语言,具有强大的通信能力及占地面积最小化等特点。RobotStudio是ABB公司针对ABB机器人开发的一款机器人仿真软件,其可以实现机器人的离线编程和机器人控制系统的仿真,并支持微软Visual Studio开发应用程序的机器人仿真软件。
2 基于PC-Interface的拆卸仿真
2.1 拆卸仿真的数据流程
PC-Interface是ABB机器人上的一个付费选项,其可使得机器人控制器和PC机之间通过以太网来建立信息通讯。通过该接口,机器人控制器可以将数据发送到PC机上,便于操作人员对机器人进行备份、生产信息的统计等操作。RobotStudio软件也可以通过该接口协议与机器人进行通信。
拥有PC-Interface接口选项的ABB机器人,配合ABB公司给出的PC SDK,用户就可以在PC机上开发独立的用户界面程序来操控ABB机器人。但是ABB提供的PC SDK只支持Visual Basic和C# 2种编程语言。本次研究采用的是C#编程语言来编写独立的用户界面程序。
用户程序的架构如图2所示。应用程序通过预先定义好的PC SDK和API函数发出指令,经过.NET平台的解析编译,发送给Windows操作系统,再通过以太网的TCP/IP协议传输给网络中的各个机器人控制器,就可以控制机器人的运动。网络中的控制器包括真实的控制器和通过RobotStudio创建的虚拟控制器,并且1个应用程序可以同时控制网络上的多台机器人控制器。值得注意的是,PC应用程序作为远程客户端需要先获取机器人操作权限后才能操控机器人,而这时的控制器必须处于自动操作模式。

图2 用户程序架构
2.2 路径规划
机器人在完成指定任务时,需要事先在空间中规划出机器人期望的运动路径或者轨迹。在实际应用生产中,机器人运动路径的起始位置和期望的最终目标位置是知道的,整个作业的环境也是确定的。不考虑动态环境的影响,机器人在完成指定任务时,只需在存在障碍的静态环境中规划出无干涉、无碰撞的运动路径,再结合时间或能量最少原则,则可以规划出1条最优路径。
机器人的运动路径通常是由直线段、圆弧段和各个轴的周转复合运动这3种路径组成的。为了在空间中规避障碍物,可以在规划的路径中增加一系列的中间点,使路径绕过障碍物到达终点。在速度一定的前提下,若要使运行时间最短,则规划的路径就必须是最短的。由于2点之间直线段最短,所以在每2个相邻的路径点之间,以直线段进行连接则最为合理。
在仿真的环境中,机器视觉并不能够得到应用,所以整个操作环境中,路径的起点、终点及障碍的位置信息是事先给出的。路径的规划可以快速并且无干涉地将拆卸的对象移出到指定位置的容器中。路径规划如图3所示。在规划路径时,为了能够避开障碍物,需要在起点的上方选取1个中间点1,2点之间的高度差为操作对象的高度加上合适的安全距离。安全距离可以防止操作对象在平移过程中与其他物体产生碰撞或干涉。在指定容器的上方选取1个中间点2,可以将对象移动到指定容器的上方,之后再移动到终点,就可以避开容器的边沿,将对象放置到收集容器中。

图3 路径规划
2.3 拆卸仿真
本文的拆卸对象为废旧的铅酸蓄电池。铅酸蓄电池是目前世界上产量最大、用途最广的一种电池。这类电池的污染主要是重金属铅和电解质溶液的污染[9]。所以有必要对废旧的铅酸蓄电池进行拆卸回收。但是铅酸蓄电池的极板是由铅和铅的氧化物构成,电解液是含有硫酸的水溶液,不适合人体对其进行直接接触,所以使用机器人来完成废旧铅酸蓄电池的拆卸工作。为了能够使机器人方便地夹取出废旧铅酸蓄电池中的铅板,要事先先去除废旧铅酸蓄电池的上盖。
本次研究中,利用RobotStudio的仿真系统,对整个操作流程进行了仿真和验证。通过RobotStudio仿真软件建立的虚拟仿真系统,与真实的机器人系统在控制功能和方式上几乎没有差异,可以通过ABB RobotStudio仿真系统来验证用户界面程序的可行性和通信能力。在RobotStudio建立的虚拟机器人系统仿真场景如图4所示。

图4 虚拟仿真系统
在RobotStudio的软件中有ABB公司的各个型号的机器人库,只需将对应型号的机器人导入即可,虚拟机器人的控制系统也可以根据引导一步步设置完成。接下来就需要自主设计机器人工具,也就是这里要用到的夹具,其外观模型需要事先在SolidWorks中设计好,导入进RobotStudio后,再通过Smart组件将其配置成可用的机器人工具,安装到机器人的末端。之后,导入待拆卸的物体模型和用于摆放零件的工作台,这样整个虚拟的仿真场景就布置完成。接下来打开本次开发设计的用户界面程序,扫描网络中的控制器并进行连接,将运动路径参数导入虚拟控制系统中,就可以远程操控机器人进行相关任务操作。具体仿真系统的建立及控制流程如图5所示。

图5 仿真系统的建立及控制流程
3 结束语
本次研究中,通过RobotStudio的仿真试验,可以简单、方便、快捷地完成对废旧铅酸蓄电池的远程操控拆卸任务。通过该次仿真,充分地验证了用户界面程序具有可靠的远程通信能力和简单方便的易用性。仿真过程流畅顺利,达到了工程领域的应用要求。
[1] 唐永宏.打造再生资源回收体系 建设“绿色北京”[J].再生资源与循环经济,2010,3(5):4-8.
[2] 梁波,王景伟,徐金球.我国电子废弃物资源化研究[J].环境科学与技术,2007,30(1):47-52,117.
[3] Vongbunyong S, Kara S, Pagnucco M. A framework for using cognitive robotics in disassembly automation[M]// Leveraging Technology for a Sustainable World. Berkeley:Springer Berlin Heidelberg, 2012:173-178.
[4] Torres F, Gil P, Puente S T, et al.Automatic PC disassembly for component recovery[J].The International Journal of Advanced Manufacturing Technology, 2004, 23(1/2):39-46.
[5] Nguyen T D, Kleinsorge M, Postawa A, et al. Human centric automation:Using marker-less motion capturing for ergonomics analysis and work assistance in manufacturing processes[C]//GCSM Proceedings - Innovative Solutions, 2013:639-645.
[6] 刘清波.面向报废汽车拆卸的虚拟机器人技术及仿真研究[D].南京:南京航空航天大学,2008.
[7] 李海龙.基于视觉/力传感器的机器人柔顺装配技术研究[D].秦皇岛:燕山大学,2014.
[8] 吴涛.工业机器人切削加工离线编程研究[D].杭州:浙江大学,2008.
[9] 范红军,王春健,张晓杰.铅蓄电池的修复及回收再利用研究[J].电池工业,2011,16(4):250-252.