光伏组件自动清洗机控制系统的设计与实现
2018-03-30杨国华徐维昌
马 磊,杨国华,徐维昌
(1.宁夏大学 创新创业学院,银川 750021;2.宁夏大学 电子信息与电气工程学院,银川 750021;3.宁夏大学 信息工程学院,银川 750021)
当前,人类正面临着严重的能源危机[1]。太阳能作为一种分布广泛、储量巨大、干净无污染的可再生资源,正受到世界各国的广泛重视[2]。光伏发电是太阳能的重要应用方向之一[3]。目前市场上单晶硅太阳能电池的转换效率为17%~22%,多晶硅为I 6%~I 9%,非晶硅为6%~10%[4]。在实际应用发现,随着光伏组件表面灰尘的堆积,其发电效率变化较大。文献[5]中通过试验发现,8个月时间内,每天清洗的光伏组件较从不清洗的组件输出功率提高了32%。文献[6]中通过试验发现,在某种条件下,对于某型号水平放置光伏组件,清扫前平均发电效率(5.8%)约为清扫后平均效率(9.93%)的58.4%。另外,光伏组件表面灰尘会引起热斑效应,严重威胁光伏组件的正常工作。因此,本文提出了一种新型光伏组件自动清洗的解决方案,并对其控制系统做了详细介绍。
1 光伏组件自动清洗机应具有的特点
为提高太阳能利用率,增加光伏发电量,常见光伏组件具有一定安装高度角[7]。若在板面上完成对其的自动清洗,则要求自动清洗机能够牢固吸附至板面,且在驱动力的作用下能够自由移动。
研究发现,光伏组件表面积灰以直径0.001 mm~0.01 mm灰尘为主。其主要来源为土壤、砂石风化产生的细小颗粒,工业、交通及建筑扬尘,另外鸟类粪便,花粉也是其主要来源之一[8]。若采用常用方式进行清洗,则需消耗大量水资源,且会造成安全隐患。由于光伏组件表面积灰颗粒度较大,干式清扫也可以达到其清扫要求。
根据以上分析,本团队提出了采用真空吸附技术和履带驱动技术相结合的自动清洗机机体方案,以及以螺旋扫刷为主的干式三步清洗的清洗方案。并根据以上解决方案制作了试验样机。图1为本设计方案指导下制作的试验样机。

图1 本设计方案指导下制作的试验样机Fig.1 Experimental prototype produced under the guidance of the design scheme
1.1 工作原理
清洗机工作开始时,将其平行于待清洗表面放置,开启微型真空泵,使其牢牢吸附至板面[9]。启动履带驱动模块,在履带的驱动作用下开始移动,并且在移动过程中完成对板面的清洗。清洗机移动过程中,控制单元时刻检测清洗机的姿态和位置信息,并将检测得到的信号进行处理运算,进而控制履带驱动单元的运动状态。图2为自动清洗机结构图。

图2 自动清洗机结构Fig.2 Structure diagram of the automatic cleaning machine
2 控制系统设计
光伏组件自动清洗机控制系统包括软件系统和硬件系统两部分。硬件系统以单片机微处理器作为控制核心,结合电源模块、直流电机驱动模块,角度检测模块和位置检测模块等[10]。软件部分则与具体工作环境和硬件器件相关。本设计中,选取STC12C5A60S2单片机为控制核心,MMA8451Q倾角传感器采集清洗机的姿态信息,以红外测距仪检测清洗机的位置信息,L298N电机驱动模块驱动直流减速电机运动,LM2596HV调压模块为系统各模块供电[11]。图3为自动清洗机控制系统构架图。

图3 自动清洗机控制系统构架Fig.3 Frame diagram of automatic cleaning machine control system
2.1 微处理器控制模块
本设计中,自动清洗机采用STC12C5A60S2单片机为控制核心[12]。STC12C5A60S2单片机为51处理器增强型,其指令与其完全兼容,运行速度为传统51单片机的6~10倍,且片内资源丰富。该型单片机带有E2PROM功能,片上集成了1280 B RAM,36/40/44个通用I/O口,8通道10位A/D转换电路,2个定时器,2个外部中断以及2个PCA模块[13]。完全能够满足本设计中对接口以及定时器的要求。
2.2 电源模块
清洗机内部不同单元所需电压不同。真空吸附模块和直流电机驱动模块所需电压为12 V,控制单元各模块所需电压为5 V。为满足不同单元对电能的需要,本设计中选取12 V直流电源,通过采用LM2596HV开关调压模块为控制系统提供稳定的5V电源。LM2596HV输入电压范围较宽(5V~60V),输出电压1.25 V~26 V连续可调,输出电流最大可达3 A[14]。图4为自动清洗机电压分配图,图5为LM2596稳压模块原理图。

图4 自动清洗机电压分配图Fig.4 Voltage distribution diagram for automatic cleaning machine

图5 LM2596稳压模块原理Fig.5 Schematic diagram of LM2596 voltage stabilizing module
2.3 角度测量模块
按照设计要求,自动清洗机需完成在倾斜面上的竖直直走、90°转弯、水平直走等动作。为保证上述要求能够实现,本设计中采用MMA8451加速度传感器完成角度检测,实时检测自动清洗机的姿态信息,并实时进行调整。MMA8451是飞思卡尔推出的一款高精度电容式微机械传感器[15]。图6为MMA8451芯片电路图。数据传输时,MMA8451遵循I2C总线协议[16]。实际工作过程中,一般情况下仅需对MMA8451模块中SCL、SDA和SA0三个引脚进行定义。本设计中,上述3个引脚分别接P1.0,P1.1,P1.2。在编程过程中,为保证测得及显示角度数值的连续性,本设计通过软件编程的方式,将MMA8451输出的角度信息限制在-90°~+90°之间,并规定以正负号表征其偏移方向(左侧或右侧)。当清洗机处于竖直状态时,输出角度为90°;向左侧偏离竖直方向时,输出角度为正值;向右侧偏离竖直方向时,输出角度为负值。
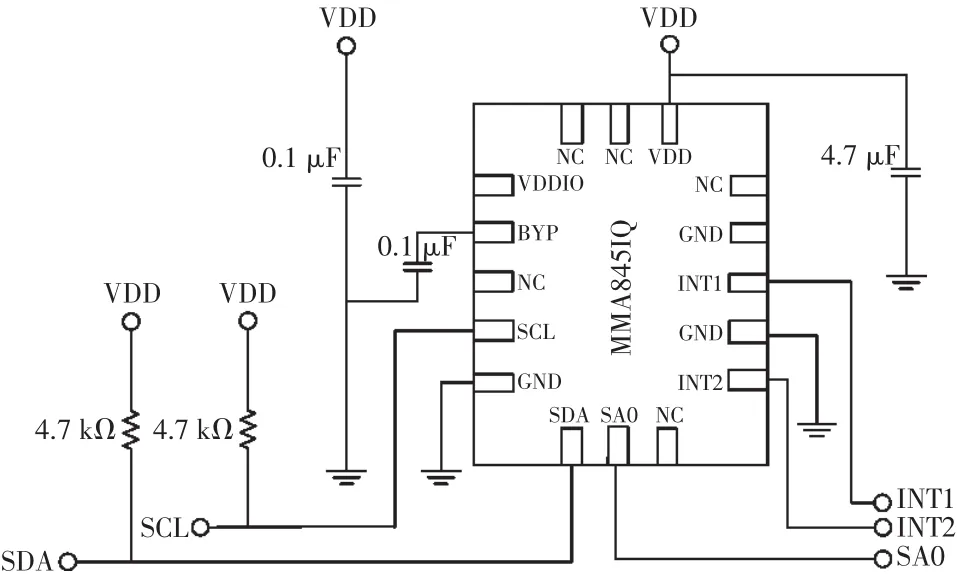
图6 MMA8451芯片电路Fig.6 MMA8451 chip circuit diagram
MMA8451为数字式加速度传感器,其x轴输出角度计算程序如下所示:

2.4 位置检测模块
为避免坠落,需设置一障碍传感器,实时检测清洗机是否运动至光伏组件边缘。本设计中以LM393红外距离传感器用于清洗机位置检测。当检测到障碍时,LM393输出高电平 1;无障碍时,LM393输出低电平0。本文将该传感器置于清洗机前方底部左右两侧,单片机采用定时循环扫描的方式获得其输出信息,并将结果(二进制表示)进行合并,记为Signal。计左侧检测障碍,右侧未检测到障碍,得到结果为Signal=01,则清洗机左侧离开板面,有掉落的危险,此时单片机控制两侧电机反转,清洗机后退,待检测结果为Signal=11时,右向转向,直至找正机身;当检测结果为Signal=10时,操作方式与上述相同;检测结果为Signal=00时,说明清洗机到达水平或竖直方向边缘,此时单片机控制清洗机逆时针转动90°,进行另一方向的清洗;检测结果为Signal=11时,说明清洗机处于正常工作姿态,只需调整其姿态为水平或竖直即可。
2.5 驱动模块
驱动模块包括驱动电路和驱动电机[17]。本设计中驱动电机为直流减速电机。在清洗机后方左右两侧分别放置一直流减速电机,通过直流减速电机带动履带运动,并通过两侧电机的差速转动实现清洗机的转向。当左右两侧电机均正转时,清洗机前行;当两电机反转时,清洗机后退;当右侧电机正转,左侧电机反转时,清洗机则向左转向,反之则右转弯。本设计中选用L298N全桥式直流电机驱动器驱动直流减速电机。L298N是ST公司生产的一种高电压、大电流电机驱动芯片,具有工作电压高(最高可达46 V),输出电流大(瞬间峰值电流达3 A),可同时驱动2个直流电机,并支持100%PWM调速。
3 控制系统软件开发
本设计采用Keil uVision4软件开发平台进行控制系统软件的编程。在程序编写过程中,采用模块化的编程思想,将不同单元模块进行分别编写,以便于程序的修改和后续性开发。

图7 控制程序流程Fig.7 Control program flow chart
3.1 模糊控制
由于本设计采用直流减速电机驱动,无法对其实现精确转角控制;且清洗机在工作过程中会发生侧滑现象;STC12C5A60S2微处理器运算速度仍较慢,从信号检测到控制直流电机工作方式间有一定时间差,无法使清洗机较快做出反应等因素,影响清洗机行走状态的因素较多,难以准确地描述清洗机的动态。为简化控制方法,减少单片机程序运算量,达到控制目的,本设计选用模糊控制法完成对清洗机的控制。
模糊控制采用非线性控制方法,无需对控制对象建立准确的数学模型[18],而是根据已有经验规则进行控制,与系统模型无关,具有较好的鲁棒性和控制规则灵活性[19]。本设计中选用单输入单输出模糊控制器,以清洗机偏离预定轨道角度值大小为输入,清洗机两侧直流减速电机运动状态为输出。本设计采用三角形的隶属函数对输入进行模糊化处理。
3.2 清洗机工作模式
本设计采用循环扫描的方式完成MMA8451,LM393等传感器模块信号的采集以及直流减速电机工作状态的控制。通过时间中断的方式,间隔相同时间完成上述操作。清洗机工作时,将清洗机置于待清洗板面右侧,且竖直放置。开启微型真空泵,使清洗机吸附至倾斜表面,启动单片机,清洗机开始工作。程序设定清洗机清洗路线为竖直方向“之”字形。清洗过程中,若LM393检测到清洗机到达板面边缘,则清洗机进行反方向运动,后调整姿态,直线行走。直线行走过程中,单片机通过MMA8451时刻检测清洗机姿态信息,并相应调整清洗机姿态,使其保证直线行走状态。图7为清洗机控制程序流程。
控制系统实际工作过程中,由于外部电磁干扰及硬件的制造工艺问题,MMA8451输出角度信息较不稳定,且跳跃性较大。本设计采用先多次测量,后排序去除最大值和最小值,最终求平均值的方式进行软件抗干扰处理。实际运行结果表明,该方法虽然增加了单片机的运算量,但是输出角度值较为稳定。
4 结语
光伏组件自动清洗机的应用,不仅可以提高光伏电站光伏组件的清洗效率,减轻人工清洗的工作强度,而且提高了光伏组件的发电效率,降低了热斑效应发生的可能性,降低了光伏电站的运行成本,并提高了光伏发电收益。本设计对大型光伏电站的运行具有较大实际意义,且可用于相关倾斜壁面的清洗。
[1]李慧.住宅建筑太阳能利用探讨[J]资源节约与环保杂志,2015(2):83.
[2]吉佳文,王文志,李金凯,等.平板太阳能集热器强化传热应用研究进展[J].材料导报,2016,30(5):45-51.
[3]刘彤.太阳能在建筑节能技术中的广泛应用[J].林产工业,2015,42(3):52-55.
[4]刁颖.光伏系统发电效率提升方法的研究[D].东北石油大学,2016.
[5]翟腾.提升光伏系统发电效率的技术研究 [J].工业技术创新,2015(2):167-176.
[6]孙欢伟.积灰对光伏系统发电效率影响及改善[D].辽宁:大连理工大学,2015.
[7]朱丹丹,燕达.太阳能板放置最佳倾角研究[J].建筑科学,2012?(S2):277-281.
[8]鲍官军,张林威,蔡世波,等.光伏面板积灰及除尘清洁技术研究综述[J].机电工程,2013,30(8):909-913.
[9]刘坤,李培印,李强,等.三轴罗茨真空泵的抽气理论和结构设计[J].真空科学与技术学报,2015,35(8):934-939.
[10]方玮.以单片机AT89C 51为控制核心的智能电动车的硬件设计[J].中国新通信,2013(8):67-68.
[11]张凌寒.基于51单片机的红外测距仪的设计与实现[J].数字技术与应用,2016(9):133.
[12]张曙云,匡洪海,曾丽琼,等.基于STC12C5A60S2的新型多功能电子钟设计[J].新型工业化,2015(7):24-28.
[13]罗浩,刘尚武,王书易,等.基于STC12C5A60S2多路温度监控系统设计[J].2015,37(2):67-69.
[14]张雷.基于北斗导航的车载终端系统设计与实现[D].陕西:西安建筑科技大学,2016.
[15]王萃迪,汪再兴.基于加速度传感器1VIlVIA8451的振动检测仪设计[J].电子科技,2014,27(4):118.
[16]余松科,方方,黄洪全.智能直流电动机驱动模块的网络化监控设计[J].制造技术与机床,2015(7):83-87.
[17]彭一准,姜小宝,庄明加,等.一种基于80C51单片机控制的寻迹小车设计[J].天津科技大学学报,2011,26(1):55-59.
[18]刘军,李建伟,李慧琴.基于模糊PID的通用中档单片机温度控制系统设计[J].科学技术与工程,2007,7(15):3934-3936.
[19]王子文,徐维昌,李明滨,等.离网型光伏发电系统自动切换装置设计[J].自动化仪表,2015,36(2):76-79.
