一种单线全周式扫描激光雷达的应用及与同类传感器的比较
2018-03-29王世峰都凯悦许庭赫马克贝肖朱勇王锐
王世峰,都凯悦,许庭赫,马克·贝肖,朱勇,王锐
(1.长春理工大学 光电工程学院,长春 130022,2.Ocular Robotics,澳大利亚悉尼 2208)
激光雷达(Laser Scanner)是计算机环境感知最普遍的工具之一,工程师能够通过这些传感器建立周围环境的二维模型或三维模型,激光雷达还可以用于导航、障碍检测及避障、目标追踪、三维重构等方面[1]。随着自主系统智能水平的不断提高,有效推断环境的能力也稳步提升。如何获取关于环境的大量数据的传感器选择就变得越来越重要。考虑到雷达和视觉系统的分辨率和精度限制问题,激光雷达成为获取大量环境数据的首选传感器。在过去十年的发展中,研究者研发了一种可以超越传统二维激光扫描仪的高效获取三维点云的方法[2]。
1 现有激光雷达简介
激光雷达一般可以分为单线和多线两种类型。比较常见的有德国SICK公司的LMS151单线激光雷达,德国IBEO公司的LUX8L 8线激光雷达,美国Velodyne公司的16线、32线、64线激光雷达。澳大利亚Ocular公司的Robot Eye RE05是一种新型的单线全周扫描的激光雷达。传统单线激光雷达的扫描区域可以简单定义为一个二维平面,多线激光雷达因为具有俯仰角参数的关系,可以认为它具有扫描三维区域的功能。而RobotEye RE05由于产品本身的特性使得它能够用单线激光对三维空间进行扫描。
1.1 单线激光雷达LMS151
LMS151是德国SICK公司推出的一款紧凑型、经济型、主要用于室外区域防撞、测量及安装的激光雷达,如图1。它通过发出的一条激光束扫描某一区域,采用激光时间飞行原理(Time of flight)通过多次回波检测技术,使得传感器即使在恶劣环境下也可以返回检测到的数据。其扫描角度为270°,扫描角度分辨率为0.25°或0.5°可调,扫描最大距离为50m,采用以太网形式传输数据。IP67的防护等级,雾气校正功能及内部集成加热器可保证该激光雷达用于户外的可行性。用户可以根据现场需要进行不同的保护区域设置,使得移动目标进入保护区域时发出警报[3]。

图1 SICK公司LMS151激光雷达
1.2 8线激光雷达LUX8L
LUX8L是德国IBEO公司LUX系列产品之一,主要应用在无人驾驶领域。它同样采用激光时间飞行原理(Time of flight)计算距离和回波的宽度。LUX8L的测量距离可以达到200m的平均距离,水平视场角为110°,垂直视场角为6.4°,距离分辨率为0.3cm,角度分辨率为0.125°,如图2。IBEO公司该系列产品的主要优势是其多层扫描功能、多次回波技术、智能角度分辨率,这些优势使得LUX8L在恶劣天气条件下也能精确识别被检测物体,确保测量结果的无误性,保证了使用的便利性和安全性[4]。

图2 IBEO公司LUX8L激光雷达
1.3 多线激光雷达Velodyne
美国Velodyne公司的64线激光雷达是Darpa无人车挑战赛上众多团队使用的主要传感器之一,随后陆续推出了16线和32线激光雷达。针对实验室所拥有的16线激光雷达和32线激光雷达进行简单对比。
1.3.1 16线激光雷达VLP-16
VLP-16激光雷达是Velodyne公司推出的最小型的三维激光雷达,安装方便,重量轻。电机转速可调节,实时上传周围环境检测的距离和反射率测量值。测量范围为100m,水平视场范围为360°,垂直视场范围为30°(+15°~-15°),距离分辨率为3cm,水平方向角分辨率为0.1°-0.4°,垂直方向角分辨率为2°。由于VLP-16的高速转速,它可以每秒输出高达30万个测量点[5]。
1.3.2 32线激光雷达HDL-32E
HDL-32E与VLP-16相比,从16个激光器上升至32个激光器,体积稍有增大,结构坚固,相比64线激光雷达体积小巧轻便,如图3。依旧是持有专利的旋转设计使得其水平视场可达360°,垂直视场范围为+10.67°~-30.67°。水平角度分辨率为0.16°(在600转速情况下),垂直角度分辨率约为1.33°。其测量距离为70m,距离精度为2cm。每秒输出约70万个点[6]。图3为Velodyne公司三款激光雷达展示,从左到右依次为HDL-64E,HDL-32E,VLP-16。

图3 Velodyne激光雷达比较
2 RobotEye RE05
上述单线激光雷达只能进行二维扫描,8线激光雷达仅仅能实现2.5D扫描,不能实现真正意义上的三维扫描。澳大利亚Ocular公司的RobotEye RE05作为单线激光雷达却能实现对周围环境的三维扫描。图4为本实验室用RobotEye RE05采集数据。
表1对比了上述激光雷达在参数上的不同,用户在不同的环境中可以选择不同的传感器。

图4 RobotEye RE05采集数据
2.1 机械结构
传统单线激光雷达如果想要进行三维扫描需要把传感器固定在移动平台上,然后通过移动或转动平台实现三维扫描。但是RobotEye RE05机械设计独特,机身保持静止,内部激光器与探头固定在一起,仅扫描探头根据用户要求(三种扫描模式可选)转动[7],如图5。

图5 探头运动方式
根据这种机械特性,RobotEye RE05的方位角范围是360°连续的,俯仰角范围为-35°~35°,且方位角和俯仰角的角分辨率都是0.01°。由于扫描镜头是单独跟踪的,不受镜头动力控制,那么记录的方位角精度和俯仰角精度独立于镜头误差的计算方法。也就是说,无论RobotEye RE05选择三种扫描模式中的哪一种,已记录的三维点的角度精度都不会变化。
2.2 扫描模式
RobotEye RE05支持3种可配置参数的扫描模式:全区域扫描、限定边界扫描、感兴趣区域扫描。这3种扫描模式可以随时转换,即使RobotEye RE05在运行过程中也能在3种扫描模式中任意切换(通常反应时间为几毫秒),这是其他3D激光雷达没有的功能。每种扫描模式都可以进行参数设置,这就意味着用户可以根据自己的需要改变扫描参数,而这些参数可以决定探头的运动方式。
2.2.1 全区域扫描
RobotEye RE05在全区域扫描模式下的扫描区域为方位角从0°~360°、俯仰角范围从-35°~35°的三维空间,如图6。从图中可以看出全区域扫描模式基本能够将室内环境都展现出来。其中有两个参数可调,一个是方位角变化率,单位是Hz,也就是每秒扫描探头旋转的角度;另一个是扫描线数,它表示最大俯仰角范围内的激光线数。对于给定的方位角变化率和扫描线数,RobotEye RE05的俯仰角变化是连续的。
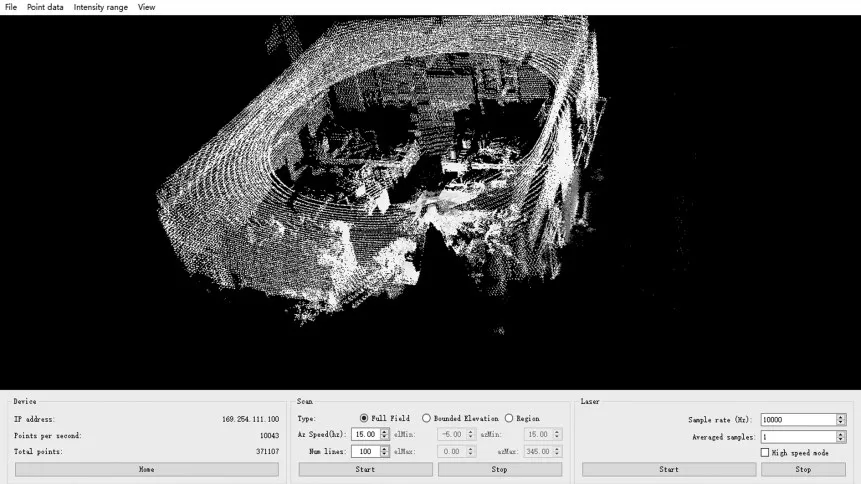
图6 全区域扫描
2.2.2 限定边界扫描
限定边界扫描其实可以看做是全区域扫描在垂直方向上的选择性截取,在水平方向上依旧是360°连续的。可调参数在方位角变化率和扫描线数的基础上增加了俯仰角的最小值和最大值,如图7。

表1 多种激光雷达参数对比

图7 限定边界扫描
2.2.3 感兴趣区域扫描
感兴趣区域扫描是由参数决定的扫描方式,这让用户通过对环境中特定区域集中扫描获得该区域的3D数据。根据RobotEye RE05探头的扫描方式可知,该模式下的扫描区域为一个长方形,由最小方位角、最大方位角、最小俯仰角、最大俯仰角决定。方位角变化率和扫描线数决定了扫描速度和边界区域内的线分辨率。由于指定区域扫描模式的方位角扫描范围是5°-180°,所以该模式下总是选择最小和最大方位角之间较短的那段弧,如图8。

图8 感兴趣区域扫描
2.3 RobotEye RE05小结
RobotEye RE05激光雷达是一款高性能的长距离激光雷达,专为快速生成空间云点而设计。采样率高达30kHz和高扫描速度的RobotEye RE05系统非常适合在室内和室外采集高达30米-250米范围内的密集点云数据。通过对三种扫描模式进行所需要的参数设定可以实现以往单线激光雷达不能达到的3D效果,即使设备运转时也可以随时切换模式,切换时间仅需几毫秒,这是其他激光雷达所没有的特点之一。由于其独特的机械设计再加上扫描的高分辨率使得RobotEye RE05在收集特定区域信息时更加灵活,更加迅速。这体现了这种新型单线多自由度激光雷达在当前市场中的重要性。
3 结语
本文对比了业内常见的各种激光雷达的相关性能参数、工作环境、外形尺寸等,认为RobotEye RE05作为单线激光雷达在进行三维环境扫描的时候所表现出来的高性能及其灵活性是一种技术上的完善。在已有技术保证高分辨率的基础上还可以根据需要调整扫描速度、扫描角度对指定区域进行扫描,从而获取想要的信息。在不同的应用领域中,RobotEye RE05可以根据不同的需求进行灵活配置和数据采集,从而完成各种复杂的三维空间重构和目标识别及跟踪等任务。
[1]Wood D,Bishop M.A novel approach to 3D laser scanning[C].Proceedings of Australasian Conference on Robotics and Automation,Australia,2012.
[2]Montabone S,Wood D,et al.A long-range depth camera with configurable field of view and resolution[C].The 9thInternationalSymposlum on Mobile Mapping Technology,Australia,2015.
[3]Sick AG,Operating instruction LMS1XX laser measurement sensors[Z].Germany,2017.
[4]IBEO,Features ibeo LUX 8L and ibeo LUX 2010[Z].Hanburg,2014.
[5]Velodyne.User’s manual and programing guide,VLP-16[Z].U.S.A,2016.
[6]Velodyne.User’s manual and programing guide,HDL-32E[Z].U.S.A,2015.
[7]Ocular Robotics,RobotEye RE05 user manual[Z].Australia,2014.
