汽车防抱死系统研究进展
2018-03-29
1 引言
研究表明,由于机动车事故所造成的重大死亡与残疾成为一个越来越大的一个社会问题,而对于减小机动车交通事故的一个重要的方法就是汽车主动安全技术。汽车防抱死系统可以在车辆制动的过程中,自动控制制动器制动力的大小,使车轮不被抱死,处于边滚边滑(滑移率在20%左右)的状态,以保证车轮与地面的附着力在最大值。
本文将介绍现今防抱死系统的最新研究成果。
2 用于车辆制动的防抱死制动系统(ABS)的开发[1]
2.1 主要目的与主要原理
作者Minh V T对汽车防抱死制动系统(ABS)进行了实验研究,分析了汽车在使用ABS系统制动时防止车轮抱死的能力,同时进行了仿真分析。并将PID控制和模糊逻辑控制器控制下的ABS系统进行对比。
对于PID控制器,设计者只可以调节三个常量(比例(Kp),积分(Ki)和微分(Kd))。但是,尽管可调参数较少,但PID控制器却被广泛应用于各个行业。使用PID控制器的ABS仿真模型如下图2-1所示,使用模糊控制的仿真模型如图2-2,三个参数的数学表达式由下式给出:

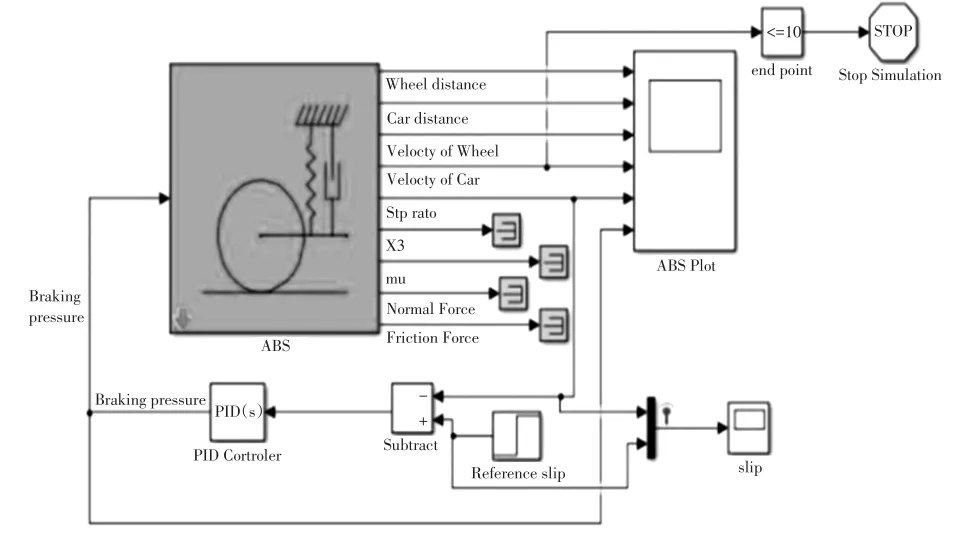
图2-1 使用PID控制器的ABS仿真模型
对于模糊控制,控制的输入量主要有两个,实际滑动与参考滑动eθ之间的滑动误差,以及最佳滑动误差 ėθ的变化率。
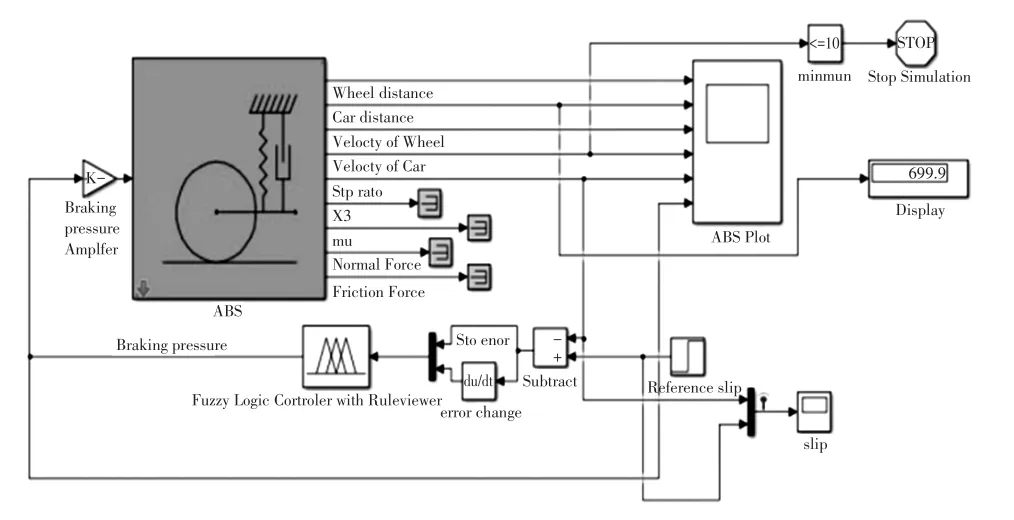
图2-2 使用模糊控制的ABS仿真模型
2.2 主要研究结果
对比两种控制结果,可以发现,使用模糊控制器的控制方案的滑差控制表现出很好的收敛速度,很少或没有超调,而对于PID,观察到相当数量的超调,收敛速度相对较慢,控制结果如2-3所示。
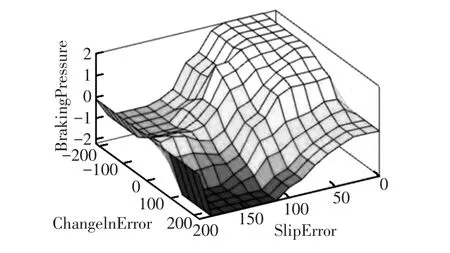
图2-3 滑差和误差变化到制动压力的映射
同时对两种控制方式的制动距离进行对比分析,对比的结果如图2-4所示。结果表明,在相同时间内,使用模糊控制ABS系统汽车的制动距离明显小于使用PID控制算法的制动距离。两种控制的滑差率见图2-5。
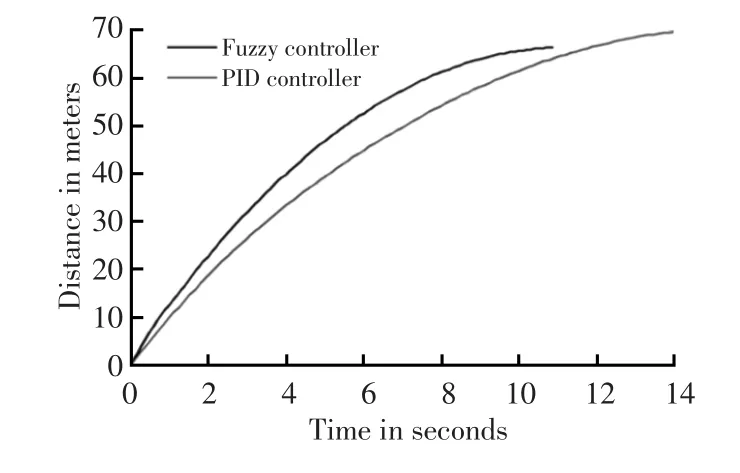
图2-4 模糊控制和PID控制制动距离
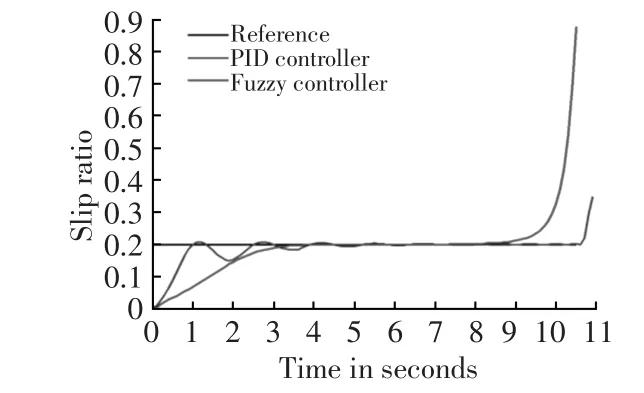
图2-5 模糊控制和PID控制滑差率对比
3 纯电动车连续再生防抱死制动系统的试验研究[2]
3.1 主要目的及主要原理
通过传统的制动系统驱动摩擦制动器和再生制动系统驱动电动机,可以实现具有单独控制的车轮驱动的纯电动车辆(EV)的防抱死制动功能。为了分析两种防抱死制动系统(ABS)的优点和局限性,作者Savitski D介绍了全轮驱动EV试验场试验的实验研究结果。制动性能评估有三种不同的配置:液压ABS;只有在前桥上的再生ABS;前桥采用混合式液压和再生式ABS,后桥采用液压ABS。液压ABS基于一个规则的控制器,连续再生ABS采用前馈和反馈控制。其中电液制动系统的结构图如图3-1所示,再生防抱死制动系统如图图3-2所示。
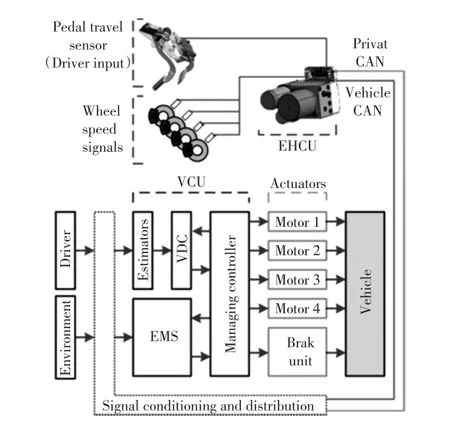
图3-1 电液制动系统的结构图

图3-2 再生防抱死制动系统
3.2 主要研究结果
低摩擦路面的测试结果表明,与没有ABS的车辆相比,所有配置ABS的车辆都能保证制动距离显著减小。此外,再生ABS制动系统可以准确监测参考车轮的打滑情况,这使得车辆减速的振荡时间较小,这将提高驾驶舒适性。所得到的实验研究的结果可用于为具有独立轮驱动的纯电动车辆的新型ABS结构的选择提供参考依据。
4 机电防抱死制动系统的鲁棒控制:CRONE方法[3]
4.1 研究背景与研究意义
现如今生产出来的大部分车都配备有自动防抱死系统(ABS),这可以防止汽车车轮在制动过程中抱死,并缩短了制动距离。大多数汽车制动器都是基于液压系统,这些系统通常呈现离散的动力学特性,对于制动器的控制是基于车轮减速阈值。然而,近来电子技术和X线控制技术的进步使得电子机械制动系统的发展成为可能,这为ABS系统的设计提供了多种可能性。
作者Benine-Neto A介绍了一种基于小型客车的机电防抱死制动系统,鲁棒分数阶控制器(CRONE)。在鲁棒分数阶控制器(CRONE)中,考虑了输入参数不确定性,非线性和干扰。为了比较,将相同的控制综合要求应用于H∞控制器的设计中。并将噪声测量和降低的路面附着力的仿真结果与H∞控制器相比。
4.2 研究结果及展望
本文介绍了第三代CRONE控制器的设计,该控制器可用于具有ABS功能的电动机械制动系统。在可变的纵向速度、车辆质量和道路附着力不确定的情况下,该控制器能够很好地跟踪车轮参考角速度。在制动能力方面,结果表明,在时间域上的性能与另一种基于H∞方法的设计要求相同时,CRONE控制器能够显著减少由于测量噪声引起的控制输入的扰动,这不仅关系到执行器的能量消耗和使用寿命,而且还涉及系统是否可以使用成本更低的轮速传感器。
[1]Minh V T,Oamen G,Vassiljeva K,et al.Development of Anti-lock Braking System(ABS)for Vehicles Braking[J].Open Engineering,2016,6(1).
[2]Savitski D,Ivanov V,Shyrokau B,et al.Experimental investigations on continuous regenerative anti-lock braking system of full electric vehicle[J].International journal of automotive technology,2016,17(2):327-338.
[3]Benine-Neto A,Moreau X,Lanusse P.Robust control for an electro-mechanical anti-lock braking system:the CRONE approach[J].IFAC-PapersOnLine,2017,50(1):12575-12581.