车道偏离警告系统安全性分析及改进措施的研究综述
2018-03-29
车道偏离引发的意外事故通常是由于驾驶员注意力不集中、能力丧失或困倦所导致的。因此为了避免这一事故,车道偏离预警系统被开发出来。该系统通过预测或实时检测驾驶情况并提醒驾驶员避免或减轻交通事故来提高交通安全水平。车道偏离警告(LDW)系统以及其他类型的高级驾驶辅助系统(ADAS)在乘用车中越来越普遍,其总体目标是通过对驾驶任务的各个方面进行自动化来提高驾驶安全性。
1 研究车道保持行为和认知负荷的关系改善车道偏离警告系统[1]
1.1 主要目的及原理
尽管越来越多的驾驶辅助系统被应用在乘用车上,但是,司机普遍对除了LDW系统外的ADAS表示满意。造成这种负面反应的一个潜在原因可能是在使用LDW时与车道保持行为相关的认知负荷增加。本文研究调查了LDW系统、车道保持行为与并发认知负荷之间的关系。测试者驾驶一辆装有LDW系统的车辆在封闭的测试跑道上的标准车道上驾驶,并在多个环节中分成使用和不使用LDW系统的情况。每两圈记录一次线路交叉的频率和持续时间,以及参与者对两者估算的准确性。
1.2 主要结论及分析
作者希望这里所报告的发现将会被今后的研究和他人的研究做进一步检验和扩展,从而得出更加确定的结论。从目前的研究结果来看,车道偏离警告系统能够有效改善车道保持行为,但是可能随着时间的推移其性能下降。此外,本文研究还发现,车道偏离预警系统增加了与维持横向车辆控制相关的认知负荷。这也就部分解释了为什么司机对LDW的接受程度低于其他类型的ADAS。这些观察结果也证实了这一点,即完全自动驾驶系统比部分高度自动驾驶系统可能更能被司机所接受。尽管完全自动驾驶系统在公共感知和信任方面面临着巨大的挑战,但是如果避免了自动化系统与驾驶员目标和偏好之间的潜在冲突,ADAS技术的潜在安全优势可能会被更加充分和容易地发挥出来。
2 通过方向盘信号检测提高车道偏离预警系统的安全性[2]
2.1 主要目的及原理
目前大部分车道偏离预警系统是通过视频识别来操作的,当遇到道路和天气条件恶劣的情况时,就会丢失一部分数据。SANDSTRÖM研究了试图根据方向盘的信号来开发一套车道偏离预警算法。这样,无论道路和天气条件如何,基于方向盘信号的车道偏离预警系统都会是稳健的。作者通过分别对34名职业驾驶学员在高保真驾驶模拟器上的驾驶操作进行监控,要求每隔3小时以80km/h速度驾驶模拟器55分钟。对每次驾驶都记录了方向盘和车道位置的信号。为了导出车道位置信号,作者对车辆模型的传递函数进行了量化,并通过它从方向盘信号中导出车道绝对位置信号。
所提出的方法要求车辆传递函数(TF)是已知的。而由于底盘、传动系统、悬架和轮胎等方面的差异,车辆传递函数在不同车型之间有所不同。为此本文通过一个简短的试驾过程来确定车辆传递函数。该算法还需要知道车道的宽度,因此实际应用中还应该与高分辨率地图和GPS系统相结合。
2.2 主要结论及未来方向
作者设计的算法通过了试验验证,其灵敏度为47%,特异性为71%,这超出了目前基于视频系统的性能。未来的研究工作将考虑把车辆建模为非线性系统,这样会提高所导出的车道位置信号与测量信号之间的相关性。此外,还可以对驾驶环境的能见度进行量化,以研究其对该算法的影响,对所提方法进行相应改进以提高灵敏度和特异性,并在真实道路上进行测试,以验证所提方法的可靠性。
3 对车道偏离警告系统和侧倾稳定性控制的商用车辆进行效益成本分析[3]
3.1 主要目的及原理
作者MEDINA-FLINTSCH介绍了安装在卡车上的两种不同的车载安全系统(OSS)在正常收入交付时的成本效益。该研究采用正式的经济分析方法对与车道偏离警告(LDW)系统和侧倾稳定性控制(RSC)系统的相关成本和收益进行了量化。这项研究使用了参与运营商所收集的数据文件,包括由很多事故数据。研究小组对每个数据文件进行了审查,以确定车载安全系统是否会减轻或防止事故。考虑到社会不同阶层的固有收益不同,作者对其进行了不同的收益成本分析(BCA)。
3.2 主要结论及分析
作者所分析的收益成本有两种:一种是运营商行业的成本和收益;一种是安全系统所产生的社会效益。分析结果清楚地表明,所产生的社会效益超过了其对于运营商和社会的成本。本研究的结果可以为运输决策者和监管机构提供了必要的信息,以便对RSC系统和LDW系统的应用做出明智的决定。
作者的研究评估了安装在7类和8类卡车上的两种不同的车载安全系统(LDW和RSC)在正常的创收交货期间运行的安全效益。在这个研究中所使用的方法不同于以往在这个领域的研究,因为它直接从参与运营商收集的数据进行分析,因此,在分析中所使用的结果数据集包含了更多的客户体验,更具有可信度。作者还收集来自每辆卡车的信息,以控制车型差异带来的影响。作者研究认为目前运营商收集的数据比GES(General Estimates System)中报道的数据更能代表运载工具的碰撞图像。此外,所使用的技术成本数据是从2011年起收集的。因此,随着设备价格的下跌,社会效益可能会随之增加。
4 通过人工神经网络实现无意识车道偏离预测技术[4]
4.1 主要目的及原理
作者AMBARAK JM探讨了三层感知神经网络在预测无意识车道偏离上的应用情况。作者在研究中使用了福特汽车公司的液压动力6自由度动基座驾驶模拟器VIRTTEX生成的驾驶员实验数据。实验数据由16个昏昏欲睡的司机模拟驾驶2000年生产的沃尔沃S80(其中每个司机驾驶3个小时)生成,总共包括3,508次车道偏离事故。首先,随机选择三分之二的车道偏离数据来训练神经网络,通过训练过程对隐含神经元的个数和输入的车辆变量进行了优化。然后,将所有训练数据从时间序列中删除,对16名驾驶员的整个驾驶时间序列逐一进行处理,使用优化后的神经网络来预测车道偏离。其中神经网络在驾驶时间序列的每个采样时刻都进行了预测,预测次数超过630万次。
4.2 主要结论及分析
在这项研究中,作者探索了基于车辆变量时间序列的三层感知神经网络预测无意识车道偏离的能力。通过试验得出结论:优化后的神经网络在0.2秒时间内的总体查全率和精度分别为99.74%和99.66%,当时间上升到0.5秒时,分别降至99.23%和85.49%。该神经网络通过寻求最佳参数值进行实验构建。对神经网络的传播训练算法进行了实验评估,其中量化共轭梯度算法在车道偏离预测中是最好的。作者还探索了不同的车辆变量、时间序列长度和滑动窗口大小对预测效果的影响。其中横向车道位置和横向速度的输入变量组合在预测车道偏离方面显示出最好的效果。此外,还对时间序列长度和滑动窗口大小进行了优化,这对于最佳预测性能具有重要意义。
5 通过控制器区域网络协议建立事故避免系统辅助车道偏离预警[5]
5.1 主要目的
作者ROOBAN K介绍了一种基于嵌入式系统的事故避免系统。该系统主要通过使用控制器区域网络协议进而控制车辆来避免交通事故的发生。作者详细描述了这种事故避免系统的设计方法及设计原理。在汽车行驶过程中,该系统实时检测汽车的状况,并借助超声波传感器传递信号,而这个信号可以用来控制制动系统(ABS)。从全球目前的数据中可以看出,人们死亡的大部分是由于交通事故。而交通事故的主要原因则是司机的疏忽造成的。为了解决这个问题,我们使用了基于控制器区域网络的事故避免系统来防止上述情况的发生。该系统的电路设计及其仿真的实现使用PROTEUS软件进行。PROTEUS最初是作为多层模式(DOS、Windows和UNIX)系统实用程序创建的,用于处理文本和二进制文件以及创建CGI脚本。
5.2 主要原理
作者着重探索了该系统硬件的实现,进一步确保用户友好性是作者所提出系统的一些有价值的特性。其中超声波驻车传感器的工作原理是首先将超声波脉冲从传感器中发出,经过表面声波传感器反射。然后车辆将接收到的信号转换成电信号。然后系统通过发射和接收声波的时间延迟来计算从传感器到被测物体的距离。当倒车接近安全距离时,该系统可以通过语音或直观的显示来告诉驾驶员周围的障碍物。测量的距离可以在LCD设备中看到。
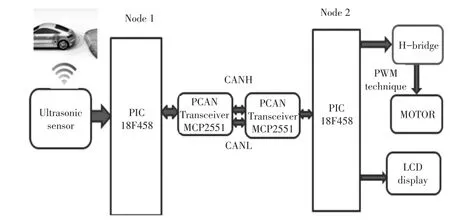
Fig.1: Block diagram of adaptivecruisecontrol
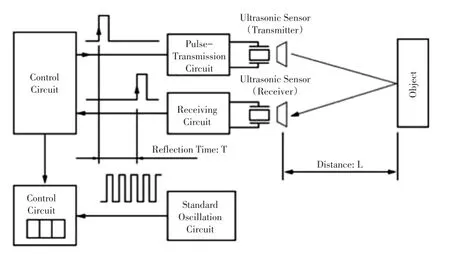
Fig.3: Block diagram of transmitter and receiver(sensors)
[1]MOORMAN H G,NILESA,CRUMPC,et al.Lane-Keeping Behavior and Cognitive Load with Use of Lane Departure Warning:WCX™ 17:SAE World Congress Experience,2017[C].
[2]SANDSTRÖM M,LAMPSIJÄRVI E,HOLMSTRÖM A,et al.Detecting lane departures from steering wheel signal[J].Accident Analysis&Prevention,2017,99:272-278.
[3]MEDINA-FLINTSCH A,HICKMANJS,GUOF,et al.Benefit-cost analysisof lanedeparturewarning and roll stability control in commercial vehicles[J].Journal of Safety Research,2017,62:73-80.
[4]AMBARAK JM,YINGH,SYEDF,et al.A Neural Network for Predicting Unintentional Lane Departures:2017 IEEE International Conference on Industrial Technology(ICIT),2017[C].
[5]ROOBAN K,GOBU V.Adaptive Cruise Control Implementation using Controller Area Network Protocol[J].International Journal of Vehicle Structuresand Systems,2017,9(1).