基于舒适性的电动汽车再生制动
2018-03-28,
,
(福州大学 机械工程及自动化学院,福建 福州 350116)
纯电动汽车的复合制动系统由再生制动系统和传统液压制动系统两部分组成。纯电动汽车在进行再生制动时,利用电机可作为发电机的特性,将汽车的部分动能转化为电能存入储能装置中,产生的制动力与液压制动系统产生的制动力共同作用于车轮,使汽车减速。由于电机制动力的介入,必然会影响驾驶员制动感觉及刹车舒适性[1]。因此,只有实现再生制动与机械摩擦制动协调工作,才能在保证制动安全性的前提下提高整车制动的舒适性,同时尽可能多地回收能量。国外研究人员将制动舒适性分为5个等级,并用“不舒适指数”表示。“1”代表所有乘客都感觉舒适,指数越高,舒适性也越差,如图1所示。不舒适指数随制动减速度及减速度变化率的增大而增大。在某些制动工况下可能出现较大减速度及减速度变化率,导致制动舒适性降低,因此有必要对复合制动力进行协调控制[2]。
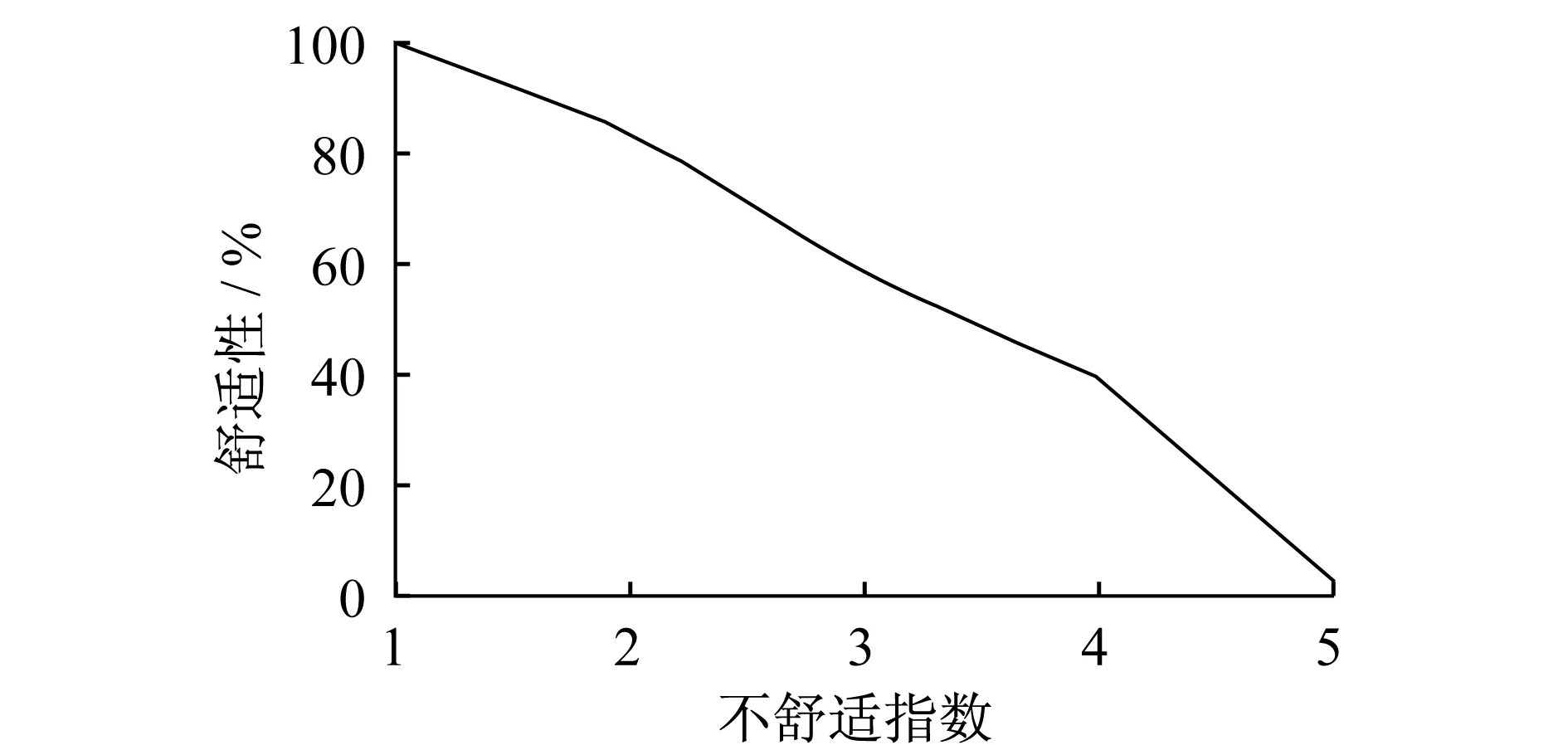
图1 不舒适指数与舒适性关系Fig.1 Relationship between discomfort index and comfort
目前,国内基于制动舒适性复合制动力分配问题的研究较少。现状如下:①校调液压与电机系统,使之具有同步响应速度[3],但导致制动响应偏慢;②对电动大巴车采用并联控制策略,即保留传统摩擦制动系统,并在此基础上对后轴添加电机制动力,通过适当减少电机制动力来提高制动舒适性[4],但该种策略回收的制动能量相对偏少。
针对电液复合制动协调性问题,本文将减速度变化率、制动强度和蓄电池荷电状态(SOC)作为模糊控制器的输入量,经模糊处理后得出合适的电机制动力分配比。把控制规则嵌入Simulink软件所构建的分配策略模型中,并利用Advisor仿真平台验证该策略的优越性。
1 再生制动的控制策略
1.1 再生制动力的分配方式
在保证安全性的前提下,尽量把制动力分配在驱动轮以尽可能多地回收制动能,同时也要兼顾制动舒适性。基于此考虑并结合纯电动汽车典型制动力分配策略[5],本文在满足联合国欧洲经济委员会(ECE)汽车法规要求下,提出改进的制动力分配策略,具体分配方式用如图2中线段OABCD所示。
当制动强度z<0.2时为小强度制动,可完全由前轮提供制动力,如图2中线段OA所示。为保证工作可靠性,线段OA长度本文取为线段OP的95%。由于当路面附着系数大于0.5、z<0.5时不易出现车轮抱死,因此0.2≤z<0.5时在保证安全性的前提下尽可能多地把制动力分配在前轮。同时考虑到液压系统可靠性,应在ECE汽车法规曲线基础上将前制动力减少5%,以更好地满足ECE汽车法规的要求,如按图2中曲线AB进行前后轮制动力分配。我国公路的路面附着系数在0.7~0.9之间,应以z=0.7为界限进行进一步讨论。当0.5≤z<0.7时为中高强度制动,应以制动稳定性为主兼顾制动能量回收,尽可能快地使制动力分配曲线接近I曲线。为防止前轮抱死,选择如图2中线段BC所示分配方式。当z>0.7时为大强度制动,属于紧急情况。为尽可能多地利用路面附着系数来保证制动稳定性,制动力分配曲线按I曲线进行,如图2中线段CD所示。
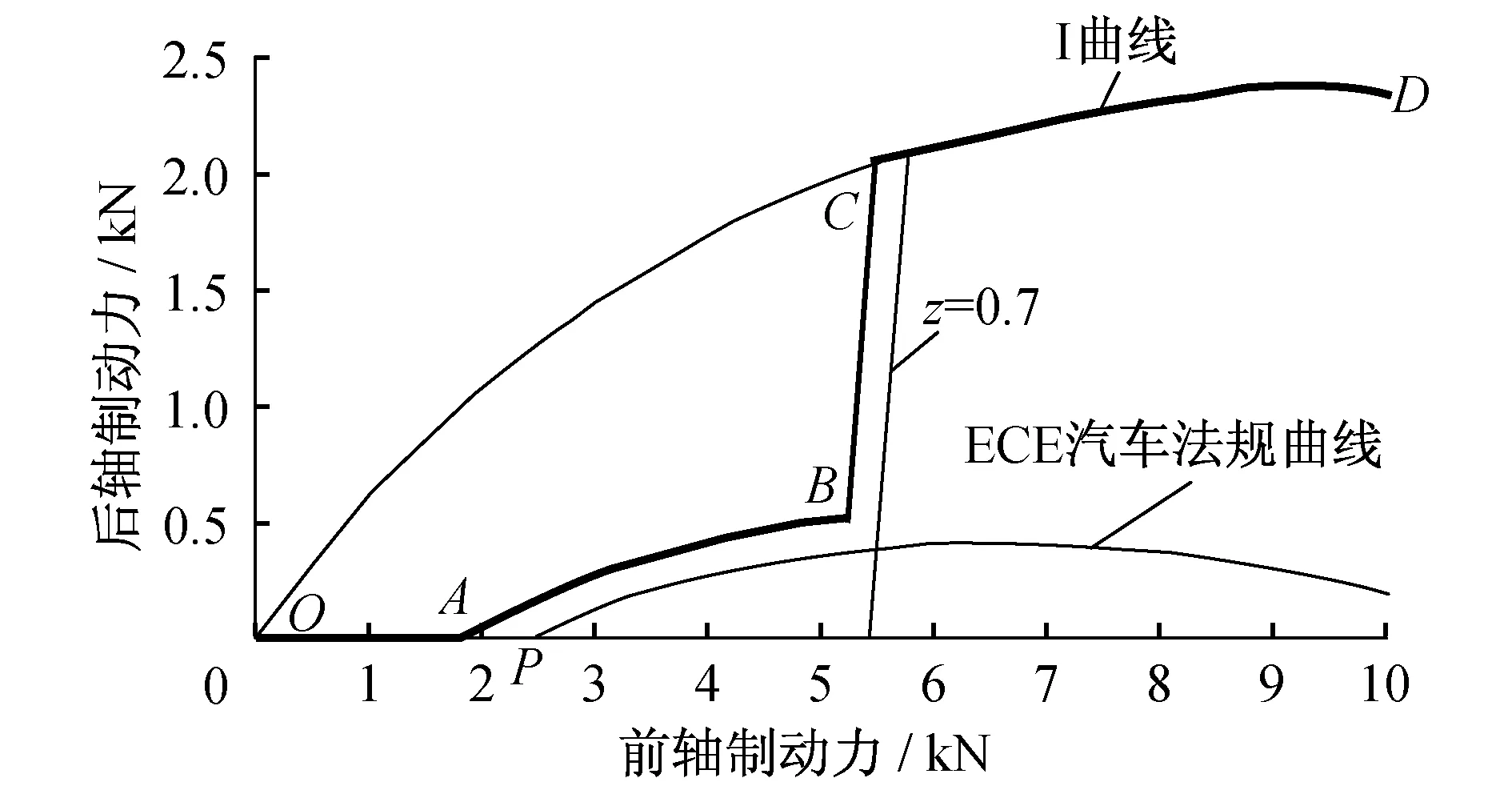
图2 制动力分配策略Fig.2 Braking force distribution strategy
1.2 再生制动控制逻辑
纯电动汽车进行制动能量回收时,其效能一般受储能装置类型、系统驱动方式、制动力分配方式、行驶速度等因素影响。
纯电动汽车的储能装置一般有蓄电池、超级电容、飞轮等,本文采用蓄电池。基于蓄电池特性,在进行制动能量回收时,需要限制最大充电电流及充电功率,以防止对蓄电池寿命造成损害。对蓄电池充电时,要考虑其荷电状态。当荷电状态过小时,充电发热明显,造成能量浪费;当荷电状态过大时,进行能量回收易造成电池过充。通常当荷电状态小于10%或大于90%时应该停止能量回收[6]。
纯电动汽车在制动过程中,只能回收驱动轮上的动能,因此应尽可能多地将制动力分配在驱动轮上。对于双轴电动车,为避免不稳定工况的出现,一般将制动力分配在前轮,因此前驱车较后驱车能回收更多能量。
制动力越多地分配在驱动轮,回收能量效率就越高。
制动初速度也会影响能量回收。当制动初速度小于一定值时,驱动轮带动电机旋转产生的电能大部分消耗在电路中,考虑到刹车可靠性,此时不进行再生制动。
基于以上因素考虑,再生制动控制逻辑流程如图3所示。
2 基于模糊控制的再生制动力分配
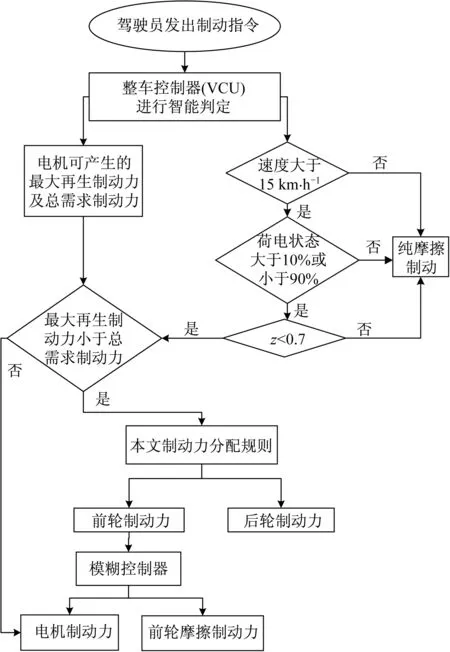
图3 再生制动控制逻辑流程Fig.3 Logic flow chart of regenerative braking control
模糊控制是通过机器来模拟人脑思维模式的一种人工智能控制,按一定规则把经验数字化、模糊化,以此控制复杂系统。复合制动系统中影响电动机制动力与液压制动力分配的因素很多,其中最为关键的是驾驶员需求制动强度、储能装置荷电状态及制动减速度变化率。模糊理论可对多变控制问题进行处理,因此本文采用模糊控制理论解决复合制动系统制动力分配问题。以制动舒适性评价指标——减速度变化率、制动强度及蓄电池荷电状态为输入量,以电机制动力占前轮总制动力的比例为输出量来设计模糊控制器。
通过专家经验法来设定各个输入变量的隶属度函数,如下所示:
(1)荷电状态
储能装置荷电状态指剩余电池容量与充满电时电池容量之比,在0~1的范围内取值,电量充满时其值为1。电池的电量过高或过低都不适合回馈充电。基于对蓄电池安全性的考虑,在荷电状态为0.1~0.9的范围内提高制动能量回馈比例,以获得更多的再生制动能。在设计的模糊控制器中,荷电状态设置3个不同水平,即低(L)、中 (M)、高(H),其隶属度函数选为trapmf,如图4所示。
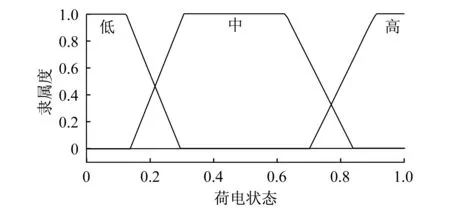
图4 荷电状态的隶属度函数Fig.4 Membership function of state-of-charge
(2)制动强度
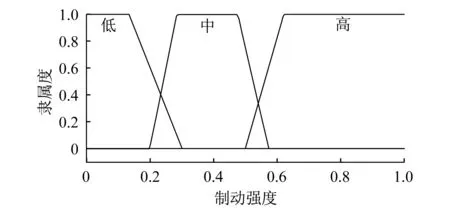
图5 制动强度的隶属度函数Fig.5 Membership function of braking intensity
(3)减速度变化率
在进行制动时,车上人员舒适性的评价指标是由汽车的冲击度来衡量,即减速度变化率,如下所示:
式中:a为车辆纵向减速度;v为行驶速度;t为时间。
减速度变化率较大,则减速度的变化较大,这就形成一定的冲击力。人体对于减速度的变化有一定的忍受范围,但超过一定范围人体的难受程度就会增加,减速度变化率越大,舒适性越低[4]。因此,在一般制动情况下,应考虑制动舒适性。制动舒适性分为5个等级,用“不舒适指数”表示,当不舒适指数为3时60%的车上人员感觉舒适。设定减速度变化率在3附近时为中等水平,即M;在2附近时为低水平,即L;在5附近时为高水平,即H。减速度变化率隶属度函数取为trapmf和trimf,具体如图6所示。
(4)再生制动比例
再生制动力与前轮总制动力比值为β。再生制动力所占比例非常少,则模糊子集为很低(LE);再生制动力占小部分而机械制动力占较大部分时,则模糊子集为低(L);模糊子集 M、H表示电机制动力中等、高的比例;当模糊子集为很高(HE)时,以再生制动力为主。模糊子集β= {LE,L,M,H,HE},取值范围为[0,1],模糊子集L、M、H的隶属度函数为trimf,模糊子集LE、HE的隶属度函数为trapmf,如图7所示。
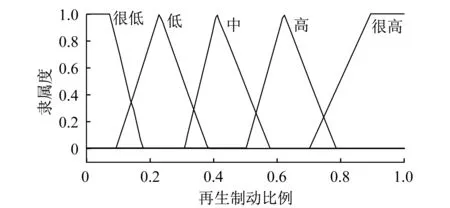
图7 再生制动比例的隶属度函数Fig.7 Membership function of regenerative braking ratio
3 仿真分析
在Advisor中进行仿真。所选路况为CYC_ UDDS、CYC_NYCC、CYC_UKBUS_MASS_VAR1。仿真结果如图8和图9所示。
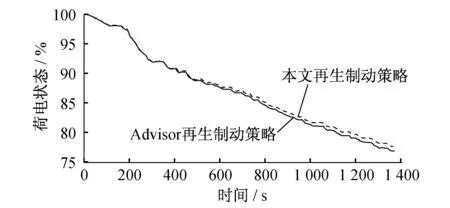
图8 CYC_UDDS工况时2种策略的荷电状态对比Fig.8 Comparison of SOC between two strategies in CYC_ UDDS condition
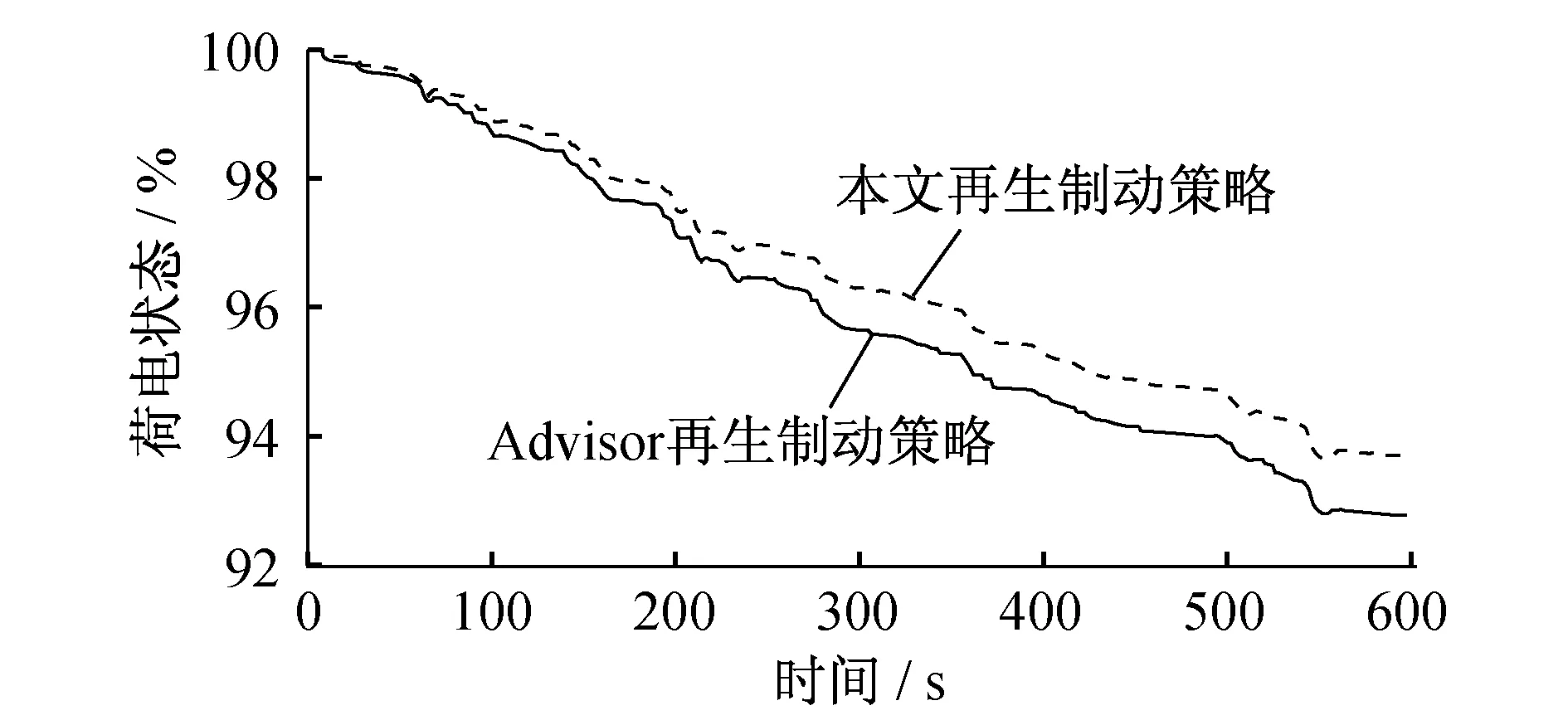
图9 CYC_NYCC工况时2种策略的荷电状态对比Fig.9 Comparison of SOC between two strategies in CYC_NYCC condition
从仿真结果可以明显看出,在CYC_UDDS、CYC_ NYCC循环工况时,本文控制策略荷电状态的下降情况较Advisor控制策略慢,表明本文控制策略可回收更多的制动能。对于Advisor再生制动策略来说,它没有纯电机制动,而本文控制策略是在制动强度小于0.2的情况下使用了纯电机制动,这样可以更有效地回收制动能。在CYC_UDDS、CYC_NYCC循环工况中,由于制动强度不大且加速度的变化率不大,故本文控制策略在以上2种循环工况进行制动时,人体均处于较舒适状态,改善效果不明显。
在CYC_UKBUS_MASS_VAR1工况时仿真结果如图10所示。从图10可看出,在Advisor控制策略下,2 000 s前荷电状态一直处在本文控制策略的下方。这是由于此阶段制动强度较小,本文控制策略大部分处于纯电机制动,因此较Advisor控制策略可回收更多能量。2 000 s后,本文控制策略的荷电状态下降较快,并且只是略微大于Advisor控制策略。原因在于后一阶段行驶过程中,制动强度及减速度变化率较大,此时较多采用机械制动,相应分配的电机制动较少,从而回收能量较少。
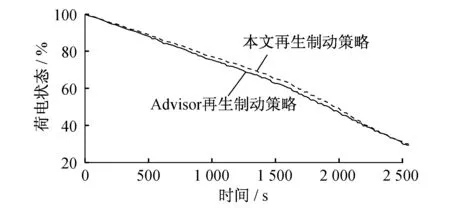
图10 CYC_UKBUS_MASS_VAR1工况时2种策略的荷电状态对比Fig.10 Comparison of SOC between two strategies in CYC_UKBUS_MASS_VAR1 condition
从图11可以看出,本文控制策略通过减小电机制动力来提高摩擦制动力的占比,在安全范围内适当增大制动系统的响应时间,从而降低了减速度变化率,在一定程度上提高了舒适性。为了更清楚地显示本文控制策略的效果,取出减速度变化率较大的一段时间(1 040~1 045 s)进行对比,具体如图12、13及图14所示。在1 043 s时减速度变化率最大,经过改进后,减速度变化率降为6.7 m·s-3左右,此时减速度为1 m·s-2左右。不舒适指数由3降到2,从而适当改善了制动时司乘人员的舒适性。
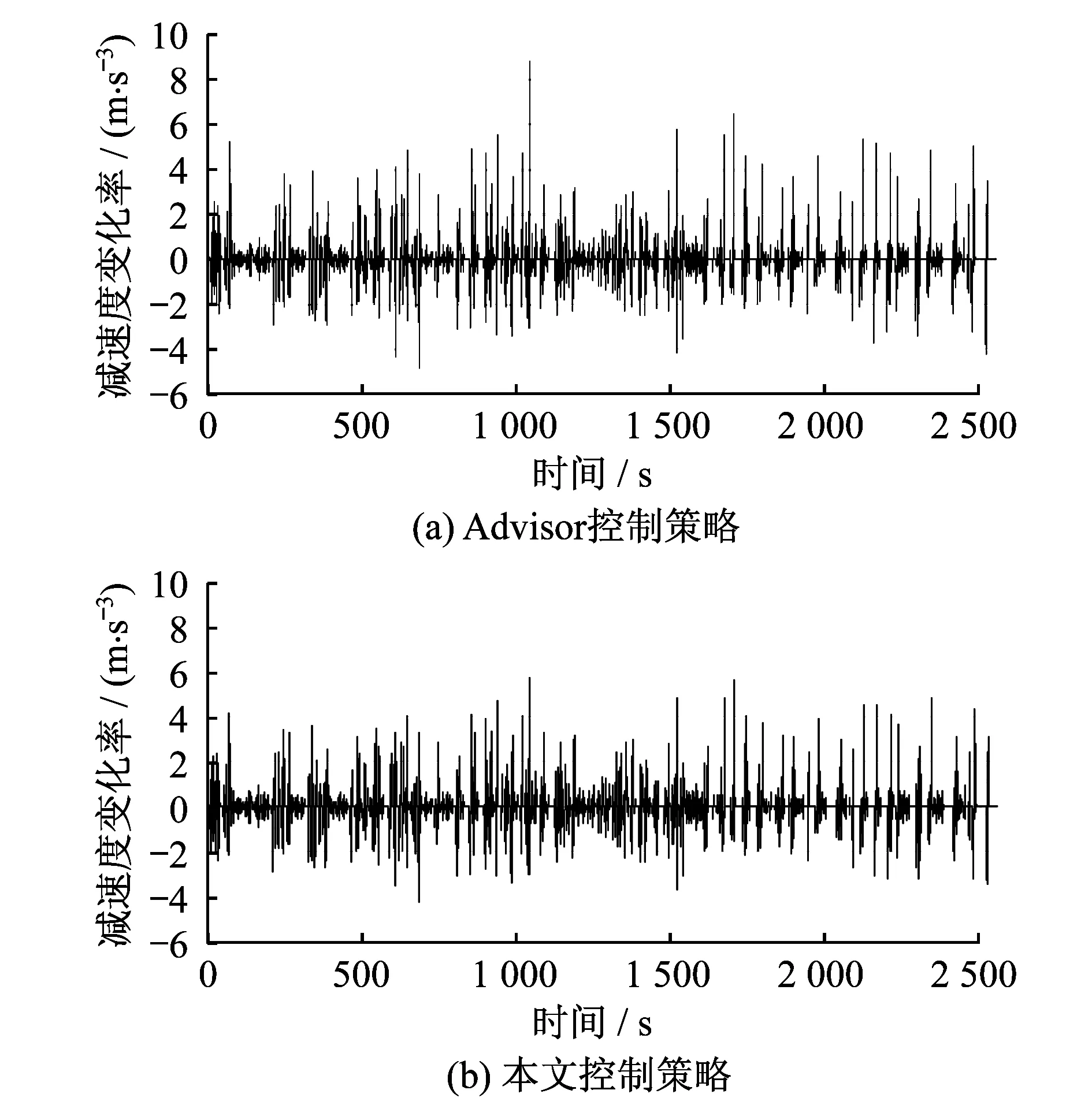
图11 CYC_UKBUS_MASS_VAR1工况时2种策略的减速度变化率Fig.11 Deceleration change rate of two strategies in CYC_UKBUS_MASS_VAR1 condition
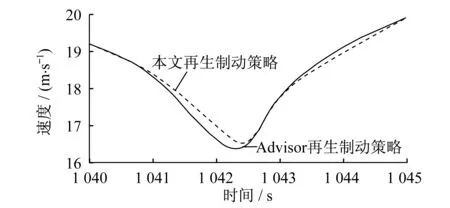
图12 1 040~1 045 s时2种策略的速度对比Fig.12 Comparison of velocity between two strategies within the range of 1 040~1 045 s

图13 1 040~1 045 s时2种策略的减速度对比Fig.13 Comparison of deceleration between two strategies within the range of 1 040~1 045 s
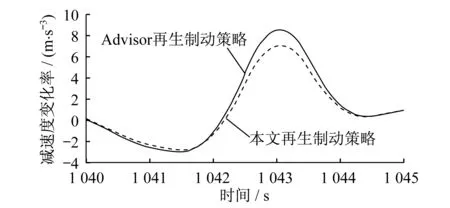
图14 1 040~1 045 s时2种策略的减速度变化率对比Fig.14 Comparison of deceleration change rate between two strategies within the range of 1 040~1 045 s
4 结语
从仿真结果可知,本文控制策略可以保证制动安全性,在一定程度上提高了能量回收的效率;在中小强度制动时,减速度变化率减小,从而提高了司乘人员的舒适性。本文控制策略具有一定的合理性及优越性,对新能源汽车控制策略的改进有一定的参考价值。由于模糊控制的局限性,可以考虑结合神经网络、遗传算法等优化方法实现更优控制,从而回收更多能量。
[1] 朱智婷,余卓平,熊璐.电动汽车复合制动系统过渡工况协调控制策略[J].哈尔滨工程大学学报,2014,35(9):1136-1141.
ZHU Zhiting,YU Zhuoping,XIONG Lu.Coordination control strategy of electric vehicle hybrid brake system in transient conditions[J].Journal of Harbin Engineering University,2014,35(9):1136-1141.
[2] MUTOH N,TAKITA K.A control method to suitably distribute electric braking force between front and rear wheels in electric vehicle systems with independently driven front and rear wheels [C]//Industry Application Conference,39th IAS Annual Meeting.Seattle:[s.n.],2004:2746-2753.
[3] NUMASATO H,TOMIZUKA M.Settling control and performance of a dual-actuator system for hard disk drives[J].IEEE/ASME Transactions on Mechatronics,2008,8(4):431-438.
[4] 何晓引.基于制动舒适性纯电动客车再生制动控制策略的研究[D].长春:吉林大学,2011.
HE Xiaoyin.Studay on control strategy of regenerative braking for electric bus based on braking comfort[D].Changchun:Jilin University,2011.
[5] 赵国柱.电动汽车再生制动若干关键问题研究[D].南京:南京航空航天大学,2012.
ZHAO Guozhu.Research on key problems of regenerative braking for electric vehicles[D].Nanjing:Nanjing University of Aeronautics and Astronautics,2012.
[6] 高树健.电动汽车再生制动控制策略设计与仿真[D].西安:长安大学,2013.
GAO Shujian.Design and simulation of the regenerative braking control strategy on an electric vehicle[D].Xi’an:Chang’an University,2013.
