基于液压马达集中驱动的玉米免耕播种机设计与试验
2018-03-28高琪珉张银平刁培松
杨 壮,高琪珉,张银平,刁培松
(山东理工大学 农业工程与食品科学学院,山东 淄博 255049)
0 引言
粒距均匀性是衡量播种质量的重要指标,保证粒距均匀不仅可以节约种子用量,还可以提高作物产量[1]。GRIEPENTROG[2]指出均匀的粒距可以减少作物间对光、水分和养分的竞争,从而提高作物产量。目前,国内市场上玉米播种机的主流机型还是机械式,排种器驱动方式为橡胶地轮驱动,播种作业时滑移率高,导致施肥播种粒距均匀性差[3-4]。国外对排种器驱动及控制方式的研究较多,Precision Planting[5]公司研发的电驱式排种系统,采用直流电机驱动排种盘,采用测速雷达获取播种机前进速度,根据测取的速度实时调控排种盘的转速,该系统已经实际应用。CASE设计的变量播种机采用电控液压马达变量播种施肥执行机构,可以通过改变液压比例阀的开度实现无级调节[6]。近几年,国内研究人员也逐步开展了排种器驱动及控制方式的研究,蒋春燕等[7]设计了步进电机驱动排种的玉米播种机,建立了电机转速与拖拉机行进速度之间的关系模型,通过单片机控制电机转速。YANG等[8]研发了排种器的电机直驱技术,采用直流电机通过周向传动的方式驱动排种,通过传感器检测地轮转速计算播种机前进速度,根本播种机前进速度和目标株距控制排种器转速。唐尧华[9]利用霍尔元件对拖拉机前轮测速,根据拖拉机行走速度控制排种器转速,证明电机驱动排种器变异系数小于地轮传动。这些研究在实验室内效果很好,但通过地轮测速,仍然存在滑移率高的问题,实际应用效果不佳[10]。国内对采用液压驱动方式的玉米播种机也很少。
为实现粒距无级调节,本课题采用液压马达驱动排种的方式,设计了粒距动态自适应系统,实现了液压马达转速与拖拉机行驶速度的精确匹配。
1 整机结构和工作原理
1.1 整机结构
基于液压马达集中驱动的玉米免耕播种机整机主要包括限深轮、防堵装置、施肥装置、播种单体及传动系统,如图1所示。其中,传动系统采用液压马达集中驱动,主要由液压马达、液压流量阀以及各级传动轴和链轮、链条组成。其主要技术参数如表1所示。
1.2 工作原理
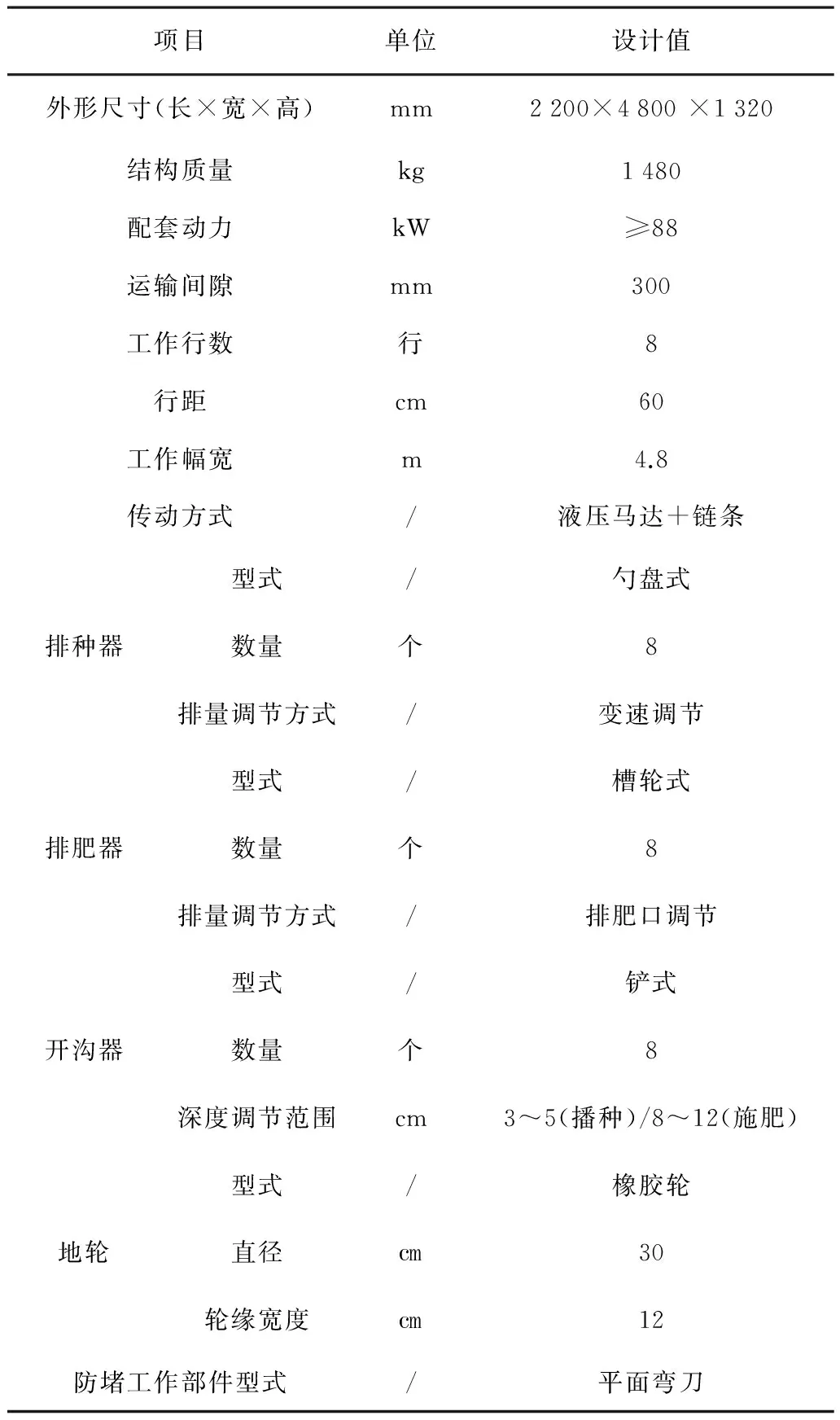
玉米免耕播种机工作时,采用北斗导航系统测速,拖拉机速度信号通过可编程控制器(PLC)转换为液压马达的流量信号,在拖拉机速度与液压马达转速之间建立一定的关系模型,使液压马达转速随拖拉机速度变化而变化;液压马达驱动总动力轴,总动力轴将动力分配给排肥轴,通过排肥轴分配给单个的排种器。液压马达速度的变化引起排种器转速的变化,从而保证播种粒距不随拖拉机行驶速度的变化而变化,实现粒距的动态自适应,工作原理如图2所示。
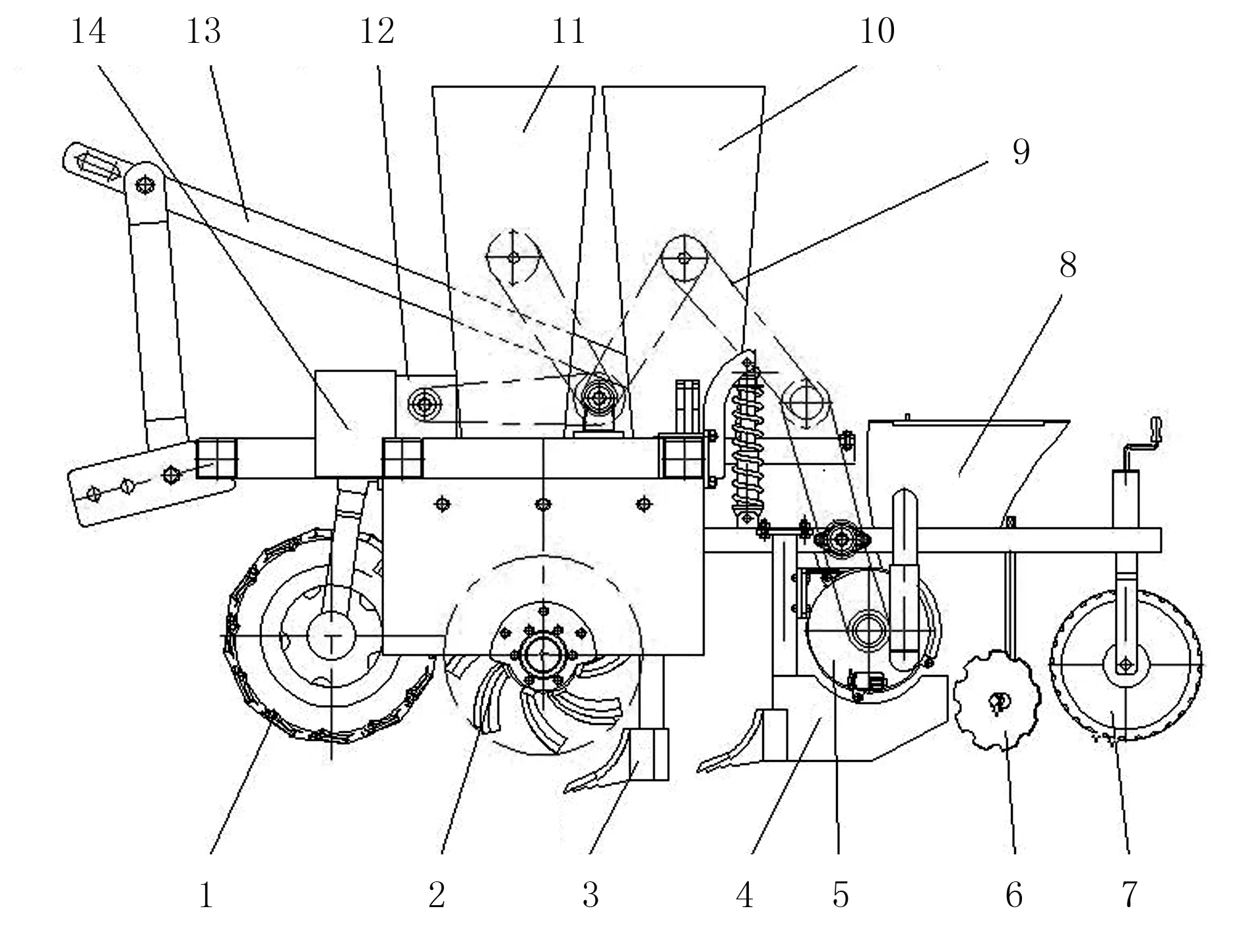
1.限深轮 2.防堵装置 3.施肥开沟器 4.播种开沟器 5.排种器 6.覆土器 7.镇压轮 8.种箱 9.传统系统 10.两侧肥箱
11.中间肥箱 12.液压马达 13.机架 14.液压流量阀 图1 玉米免耕播种机Fig.1 No-tillage planter of corn表1 玉米免耕播种机技术参数Table 1 Technical parameters of no-tillage maize planter
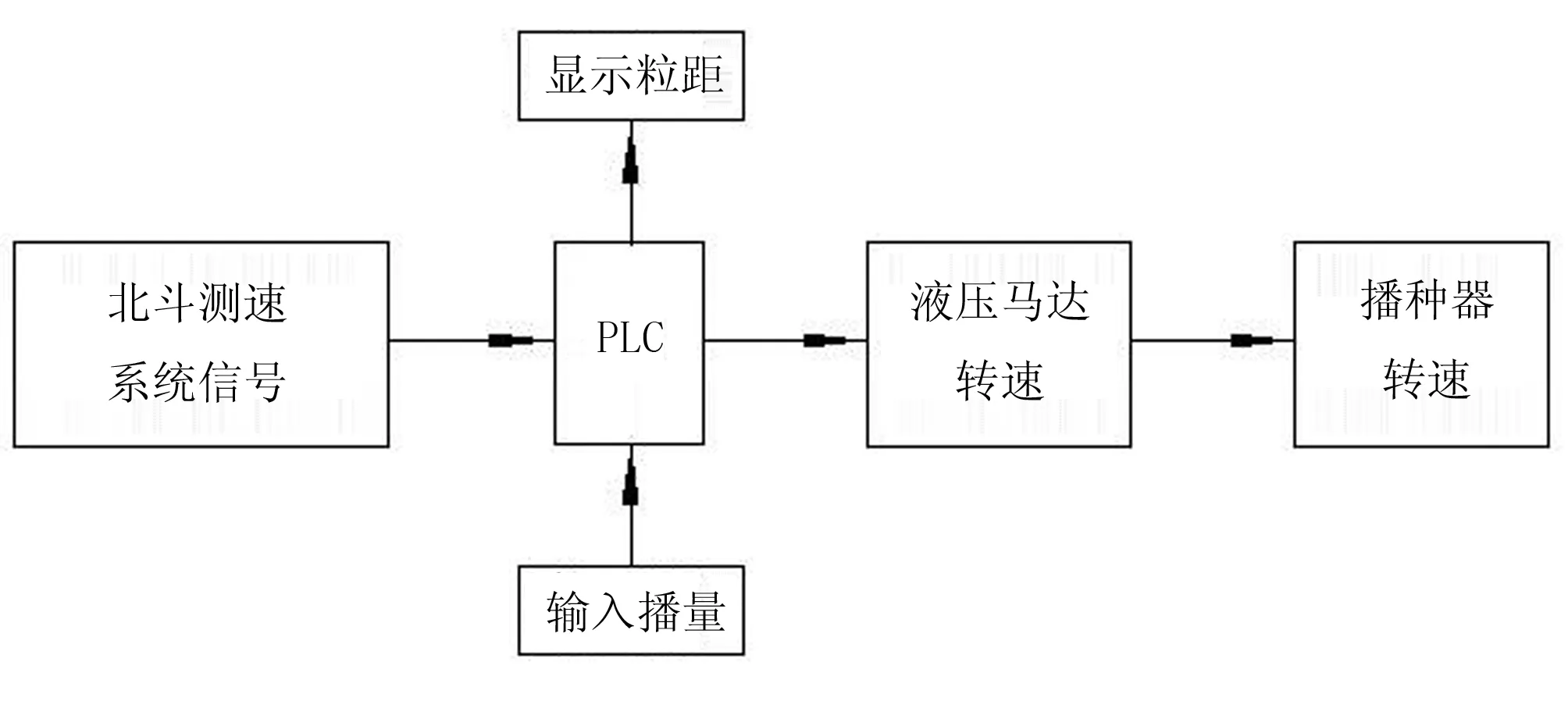
图2 粒距动态自适应系统工作原理Fig.2 Working principle of the seed spacing dynamic adaptive system
北斗导航系统安装在拖拉机上,一方面为排种器驱动电机提供速度信号;另一方面在没有划行器的情况下保证播种行直线度和邻接行距一致,方便后续管理。同时,北斗导航系统具有辅助驾驶功能,在作业过程中,机手无需掌控方向盘,拖拉机即可按设定的路径行驶,在地头转弯时进行人工干预,辅助驾驶模式自动解除,大大减轻了机手的劳动强度,提高作业的准确性和效率[11-12]。
2 关键部件设计与计算
2.1 液压驱动方式设计
针对液压马达驱动使用液压马达驱动,设计了两种液压马达驱动方案。方案1如图3(a)所示:排种器采用独立的液压马达,由一个液压站统一供油。方案2如图3(b)所示:采用一个液压马达集中驱动主轴,主轴再将动力分配到各排种器。
通过实验室实验可知:采用方案1时,即使是同一型号、同一批次的液压马达,由总的液压站分配到各个液压马达的流量也会有差异,很难标定,造成各行播种粒距不一致,无法达到要求的播种精度。而方案2由一个液压马达驱动主轴后再将动力进行分配,可以保证每个排种器转速一致,从而保证各行播种粒距的一致性。因此,本研究采用方案2的驱动方式。
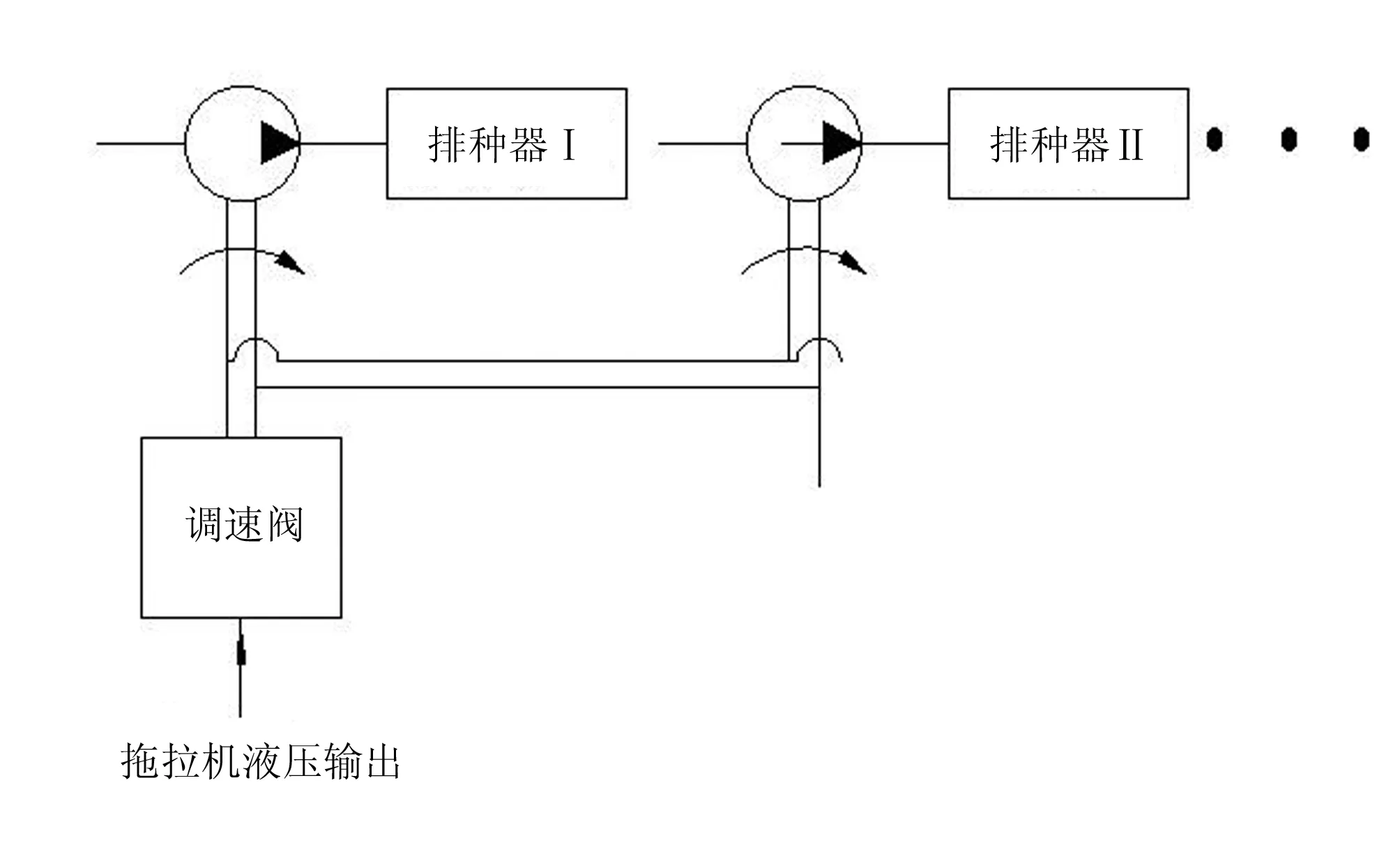
(a) 方案1 排种器独立驱动
(b) 方案2 排种器集中驱动 图3 排种器液压驱动方案Fig.3 Methods of seed metering device hydraulic driven
2.2 液压元器件选择
2.2.1 液压马达
根据玉米免耕播种机的工作环境及工作性能要求,选用液压马达首先应保证马达的功率及流量能够达到使用要求,本课题选用BM1系列摆线液压马达。该系列液压马达体积小、质量轻;转动惯量小,在负载下容易启动;低速大扭矩,安装方便;响应速率快[13]。由于所需液压马达仅需带动排种器和排肥器的工作,不需要太大的输出功率,因此可选用BM1-160摆线液压马达,如图4所示。

图4 BM1-160摆线液压马达Fig.4 BM1-160Cycloid hydraulic motor
2.2.2 PLC(可编程控制器)
该玉米免耕播种机的施肥器、排种器由转速液压马达驱动,液压流量阀流量由PLC控制,PLC根据测得的速度动态调节液压马达转速,使排种器转速与播种机作业速度一致。选用西门子S7-200 SMART系列PLC,如图5所示。
该款PLC有极高的可靠性,丰富的指令集, 易于掌握,操作便捷,内置丰富集成功能,实时性好,通讯能力强劲,扩展模块丰富[14]。
图5 S7-200 SMAR控制器Fig.5 SMAR S7-200 controller
2.2.3 比例调速阀
该玉米免耕播种机的排种器由液压马达驱动,液压马达转速通过流量控制,为保证液压马达转速的稳定,所选用的流量阀必须能在低速时防止跳动,因此选用2FRE6A-20B/10Q-R型比例调速阀,如图6所示。该比例调速阀采用给定电气信号控制系统的流量保存恒定,与压力和稳定变化无关,其流量特性和动态特性好,压力损失小,能有效避免起动跳动[15]。

图6 比例调速阀2FRE6A-20B/10Q-RFig.6 2FRE6A-20B/10Q-R proportional flow regulator
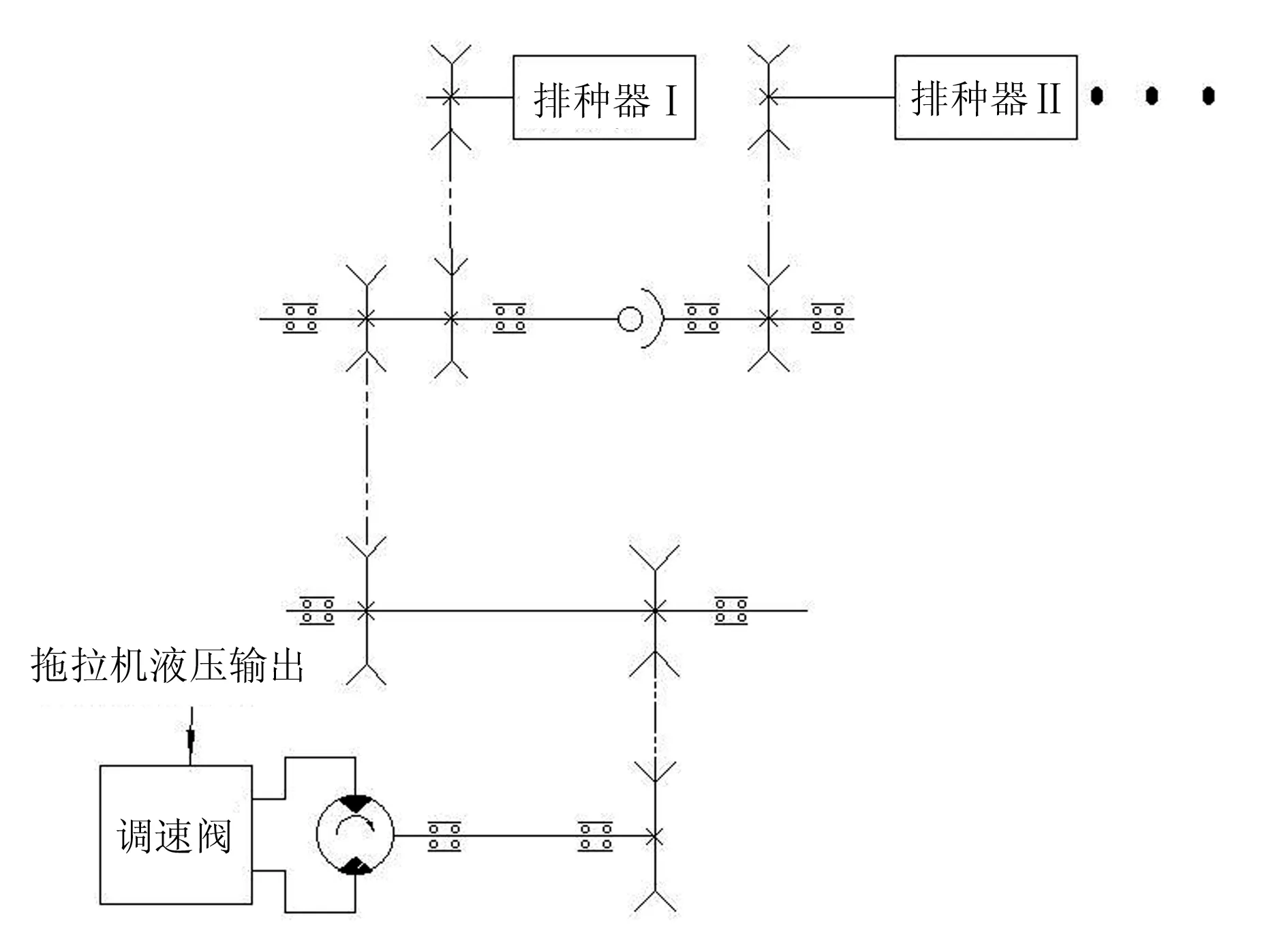
播种机作业启停阶段速度较低,通过北斗导航所测速度信号不稳定,为了修正低速时测得的不稳定信号,在动力主轴上安装齿盘测速传感器,测速结果反馈给PLC,修正液压马达转速,保证排肥、排种的均匀性。液压控制系统的工作原理如图7所示。
2.3 排种器转速与机具作业速度关系
播种作业时,首先将亩播量输入到PLC控制器中,建立播量、排种器转速与机具行驶速度之间的函数关系,即
L=v·t
(1)
其中,L为t时间内拖拉机行驶的距离(m);t为拖拉机行驶距离为L所用时间。
(2)
式中N—亩播量(株/667m2);
n—排种器转速(rad/s);
m—单个排种器上的勺孔数量;
v—拖拉机行驶速度;
d—行距(m)。
从而得排种器转速与机具行驶速度、亩播量之间的函数关系为
n=N·v·d/666.67
(3)
根据建立的关系模型编制程序,设计排种器转速及流量控制电路,如图8所示。

图7 液压控制系统原理图Fig.7 Hydraulic system principle sketch
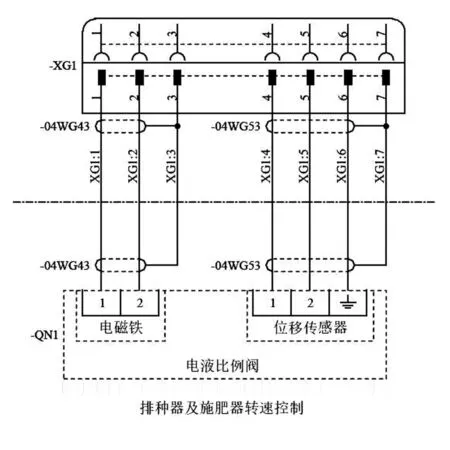
图8 排种器转速及流量控制电路图Fig.8 Control circuit diagram of the speed and flow rate of the seeder unit
3 试验
3.1 试验条件
试验在山东淄博临淄富群农机合作社试验田进行,秸秆覆盖量不小于40%,秸秆切碎长度合格率不小于85%、残茬覆盖量0.3~0.6kg/m2(秸秆含水率不大于25%),配套动力不小于89kW。
3.2 试验方法
排肥、排种性能在生产厂内进行试验检测,整机性能和播种参数在田间生产示范试验基地进行。
试验地测定区长100m、宽50m,在小麦收获后的第2 天进行检测,地块平整,同时测定了土壤含水率、土壤坚实度、麦茬高度、秸秆覆盖量等。主要检验依据为JB /T 6274.1 - 2001《谷物条播机技术条件》、GB /T 20865- 2007《免耕施肥播种机》和GB /T 6973 -2005《单粒( 精密) 播种机试验方法》。检测设备包括照相机、摄像机、土壤坚实度仪、土壤水分温度测量仪、土壤盒以及容重器、谷物快速水分测定仪、电子自动数粒仪、手持气象站、光电式转速表、标杆、烘干箱、台秤、电子天平和皮尺等[16-17]。
1)播种机防拥堵性能测试:往返一个行程不发生堵塞或者有一次轻度堵塞,即视为合格。
2)粒距均匀性测量:设置拖拉机行驶速度为2、3、4km/h,亩(667m2)播量分别为4 000、4 500、5 000株和拖拉机行驶速度为4km/h,分别播种一个来回,播种后随机取8行,每行在100m内随机取20个点,人工扒开土层进行粒距测量,记录数据。
3)播种、施肥深度测量:播种后,随机取8行,每行在50m内随机取20个点,人工扒开土层进行播种深度、施肥深度测量,并记录测试数据。
4)邻接行距测量:播种后,在几趟往返的邻接行上随机取100m,测量100m内邻接行上任意2行的行距,重复10次记录数据。
3.3 试验结果
1)机具通过性在机具的3次通过性测试中,测试行程100m,3次均无堵塞,机具的通过性良好。
2)粒距测量所得结果如表2所示。试验结果表明:在不同的作业速度下,播种粒距合格率均不小于95%,符合设计要求;但随着作业速度的增加,粒距合格率下降,这可能与勺盘式式排种器的排种精度有关, 因此对于勺盘式播种机来说,要保证粒距均匀性,其作业速度最好不超过4km/h。
3)播种深度、施肥深度测量所得结果如表3所示。播种深度、施肥深度及种肥间距合格率分别为88.82%、90.32%、90.17%,符合设计要求。
4)邻接行距测量所得结果如表4所示,可知北斗导航的定位邻接行间距误差为2.8(cm/100m)。
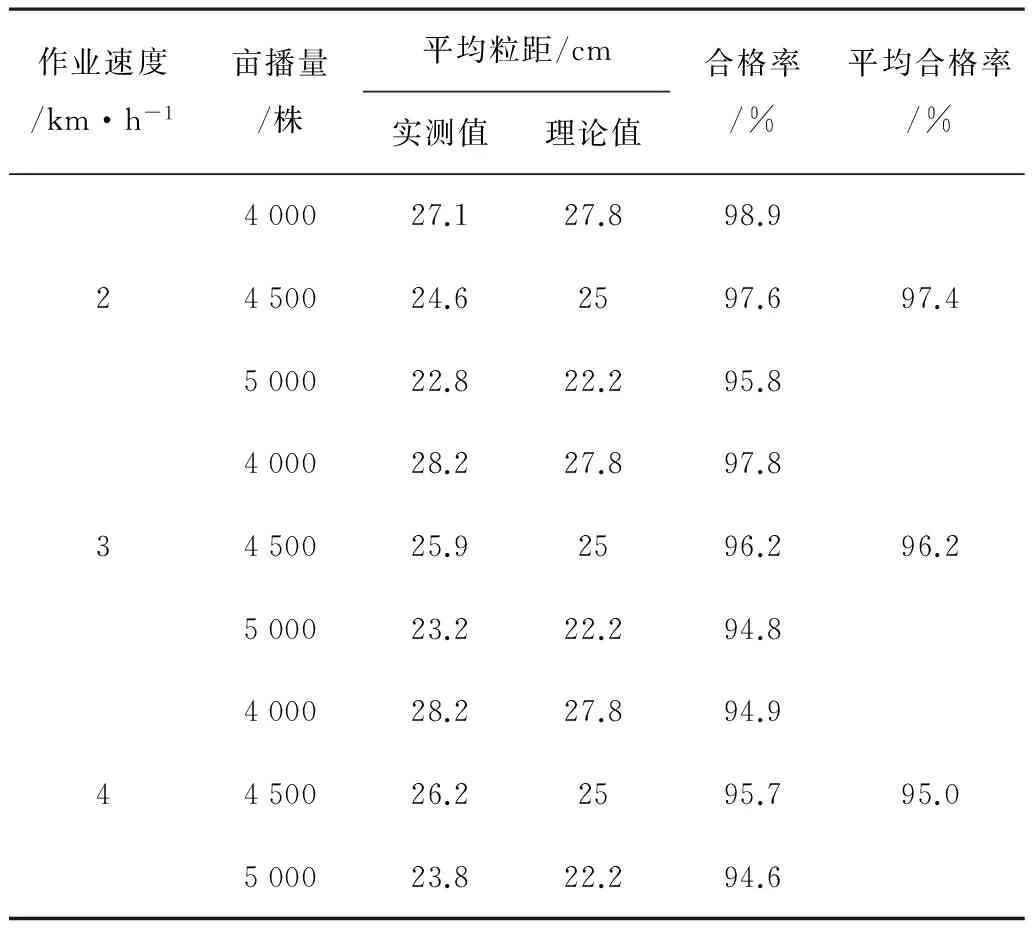
表2 粒距测量结果Table 2 Results of seed space
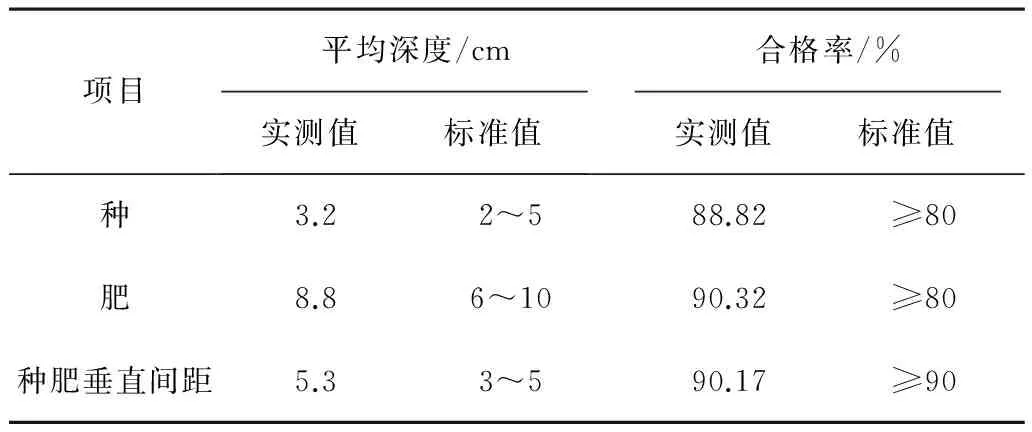
表3 播种试验结果Table 3 Results of planting
4 结论
设计了一种液压马达集中驱动排种的玉米免耕播种机,重点设计了液压驱动系统和传动系统,解决了粒距无极调节问题。设计的株距动态自适应系统,能保证株距不随拖拉机行驶速度的变化而改变。田间试验表明:在秸秆覆盖量大于40%条件下,基于液压马达集中驱动排种的玉米免耕播种机通过性良好,在作业速度≤4km/h的条件下,播种粒距合格率均不小于95%,播种深度、施肥深度及种肥间距合格率分别为88.82%、90.32%、90.17%,邻接行距误差为2.8cm,符合设计要求。
[1] 冯晓静, 桑永英, 张东兴. 玉米精密播种机播种均匀性影响因素的分析[C]// 玉米产业技术大会, 2008.
[2] GRIEPENTROG H W. Seed distribution over the area[C]// Ag Eng Oslo 98. International Conference on Agricultural Engineering, 1998:66-67.
[3] 王次年. 免耕播种机防滑地轮的设计与研究[D].淄博:山东理工大学, 2011.
[4] 王次年, 夏连明, 张绪凤.免耕播种防滑地轮的设计与研究[J].农机化研究, 2012, 34(1):139-141,145.
[5] STAGGENBORG S A. Effect of planter speed and seed firmers on corn stand establishment[J].Applied Engineering in Agriculture, 2004, 20(5):573-580.
[6] 王熙, 王新忠.三种不同变量施肥执行机构的比较研究[J].农机化研究,2006(1):122-124.
[7] 蒋春燕.玉米精密播种机智能控制系统的研究[D].淄博:山东理工大学,2015.
[8] Zhang G Z, Zang Y, Luo X W, et al.Design and indoor simulated experiment of pneumatic rice seed metering device.[J].International Journal of Agricultural & Biological Engineering,2015, 8(4):10-18.
[9] 唐尧华.基于拖拉机前轮转速的排种驱动系统的研究[D].保定:河北农业大学,2009.
[10] 赵艳忠,张晨光,王运兴,等.免耕播种机地轮摩擦力与滑移率试验研究[J].东北农业大学学报, 2016,47(10):58-66.
[11] 张野, 张瑞宏, 金亦富,等.基于北斗导航的自动驾驶系统在农用拖拉机上的应用[J].农业装备技术, 2016,42(3):8-10.
[12] 林武坤.番禺区农机部门对拖拉机辅助驾驶装置进行试验[J].现代农业装备,2015(2):74.
[13] 宋一平, 孟轩.摆线液压马达的选用[J].工程机械与维修,2010(1):162-163.
[14] 何献忠.可编程控制器应用技术:西门子S7-200系列[M].北京:清华大学出版社,2013.
[15] 杜来林, 杨超.调速阀流量稳定性分析[J].机电产品开发与创新,2011, 24(3):138-140.
[16] 杨自栋, 杜瑞成, 马明建,等.2 BMFY-4型玉米免耕播种机研制与试验[J].农机化研究, 2014,36(1):155-160.
[17] 杨自栋, 杜瑞成, 蔡善儒,等.2BMFY-4型智能玉米免耕播种机研制与示范[C]// 中国农业工程学会2011年学术年会论文集,2011.
