采摘机器人无线通信系统设计
——基于LTE-advanced与微粒群算法
2018-03-28杨文铂
郑 冰,杨文铂,李 航
(1.河南工业职业技术学院,河南 南阳 473000;2.南阳道路运输管理局,河南 南阳 473000)
0 引言
近年来,随着网络技术、集成技术和智能化程度的逐渐提高,人们对通信的要求越来越高,网络成为必不可少的传输手段[1]。由于网络所需覆盖大幅度增大,有线网络技术难以满足需求,因而无线通讯技术迎来了快速发展,农业领域也正逐渐向农业无线通信转型[2-5]。本文以LTE-Advanced和微粒群算法为通信路径搭建了采摘机器人无线通信系统,采用高效的质效控制和通信协议,很大程度提高了网络可靠性和稳定性。
1 微粒群算法
微粒群算法起初只是为了将鸟群毫无规律的觅食路径采取图形化的方式展现出来[6-7]。该算法是20世纪末期由美国社会研究学家James Kennedy和电气工程师Russell Eberhart一起研究提出的[8-10]。其主旨来源于两人早期对鸟类行为进行研究得到的想法,他们根据鸟群外出寻找食物的复杂情形,并结合生物种群聚集模型,对鸟群设计了特定的运动规则,模拟和设计了鸟群随机无规则的运动仿真模型。试验结果表明,该模型在多维空间中具有非常强大的优化能力[11]。微粒群算法中包含多个没有质量和体积大小的粒子,这些粒子可以看作成能互相传递数据信息且具有一定记忆的个体,在仿真时,可以在目标空间中随意改变移动方向和速度[12-15]。
在三维空间中,鸟群运动轨迹优化目标解能够被空间粒子运动位置进行演算[16]。在某一时间节点粒子位置xi(t)可由前一时间节点xi(t-1)和速度vi(t)表示,即
xi(t)=xi(t-1)+vi(t)
(1)
其中,i表示第i个粒子。
在整个仿真过程中,每个粒子运动轨迹都需要求得最优解的一个可行解,因此粒子可以根据自己的记忆,将最好的pwelli记录下来并将信息与其他粒子进行分享;然后在所有的pwelli中寻找最好的点,即当前发现的最优目标解,记为gwelli。粒子的移动速度会收到将受到gwelli的影响,并不断逼近该点,速度计算公式为
vi(t)=w·vi(t-1)+c·rand·[gwelli-xi(t-1)]
(2)
其中,w为惯性因子;c为加速因子,rand为[0,1]间的一随机数。在三维空间中的微粒群算法的流程如图1所示。
微粒群算法的具体过程为:
Step1,对微粒群算法进行初始化。
Step2,制定粒子自适应函数。
Step3,寻找记录当前最优点gwell。
Step4,更新当前次数的pwelli与最优点gwelli作比较,如果优于gwelli则进行一次更新。
Step5,判断是否已经达到初始化设定的最大迭代次数,若未达到则返回Step2继续操作,否则结束本轮寻优。
Step6,结束,输出并保存最优点gwelli。
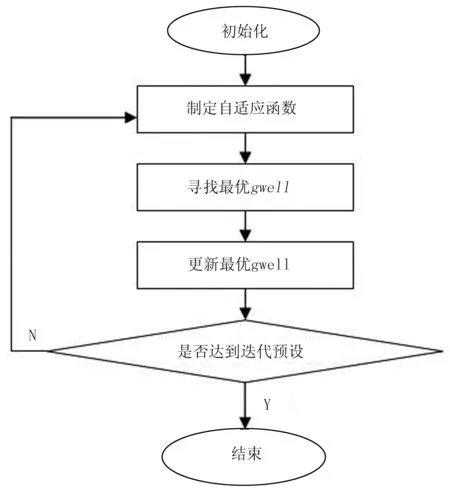
图1 微粒群算法流程图Fig.1 The flow chart of particle swarm optimization algorithm
2 LTE-Advanced技术
2.1 LTE-Advanced技术概述
近年来,随着通讯和网络技术的快速发展,移动通信系统升级速度越来越快,LTE-Advanced通信系统应运而生[17-21]。LTE-Advanced 作为第四代通信系统核心技术之一,是一项具有我国自主知识产权的技术,其结合OFDM、MIMO及64QAM调制等多项高新技术,使其在传输速率、频谱利用率和传输时延等方面获得了更加的进步,在技术由于网络覆盖面广,适合移动跨区跨站点作业,因此适合在采摘机器人无线通信系统中使用[22-23]。LTE-Advanced通信系统的性能需求如表1所示。
2.2 LTE-Advanced系统架构
与一般的蜂窝移动网络采取的信号交换电路不同,LTE-Advanced系统只支持分组交换业务,也就是在数据分组中与用户对象建立无缝的信息传递机制[24]。因此,分组系统演进成了更高级别的演进分组系统,包括演进的分组交换核心网和演进的接入网E-UTRAN。LTE-Advanced系统架构如图2所示。

表1 LTE-Advanced通信系统的性能Table 1 The performance of LTE-Advanced communication system
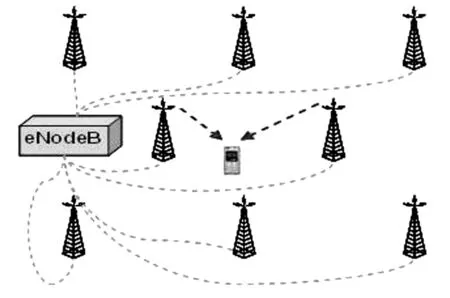
图2 LTE-advanced系统架构图Fig.2 The architecture diagram of LTE-Advanced system
3 采摘机器人无线通信系统的设计
3.1 采摘机器人感知系统的设计
感知系统相当于人类的眼睛和手脚,使没有视觉和触觉的采摘机器人通过感知系统获取丰富的数据信息,然后作出正确的判断。该感知系统主要包括视觉、位置和避障3类传感器[25],如图3所示。
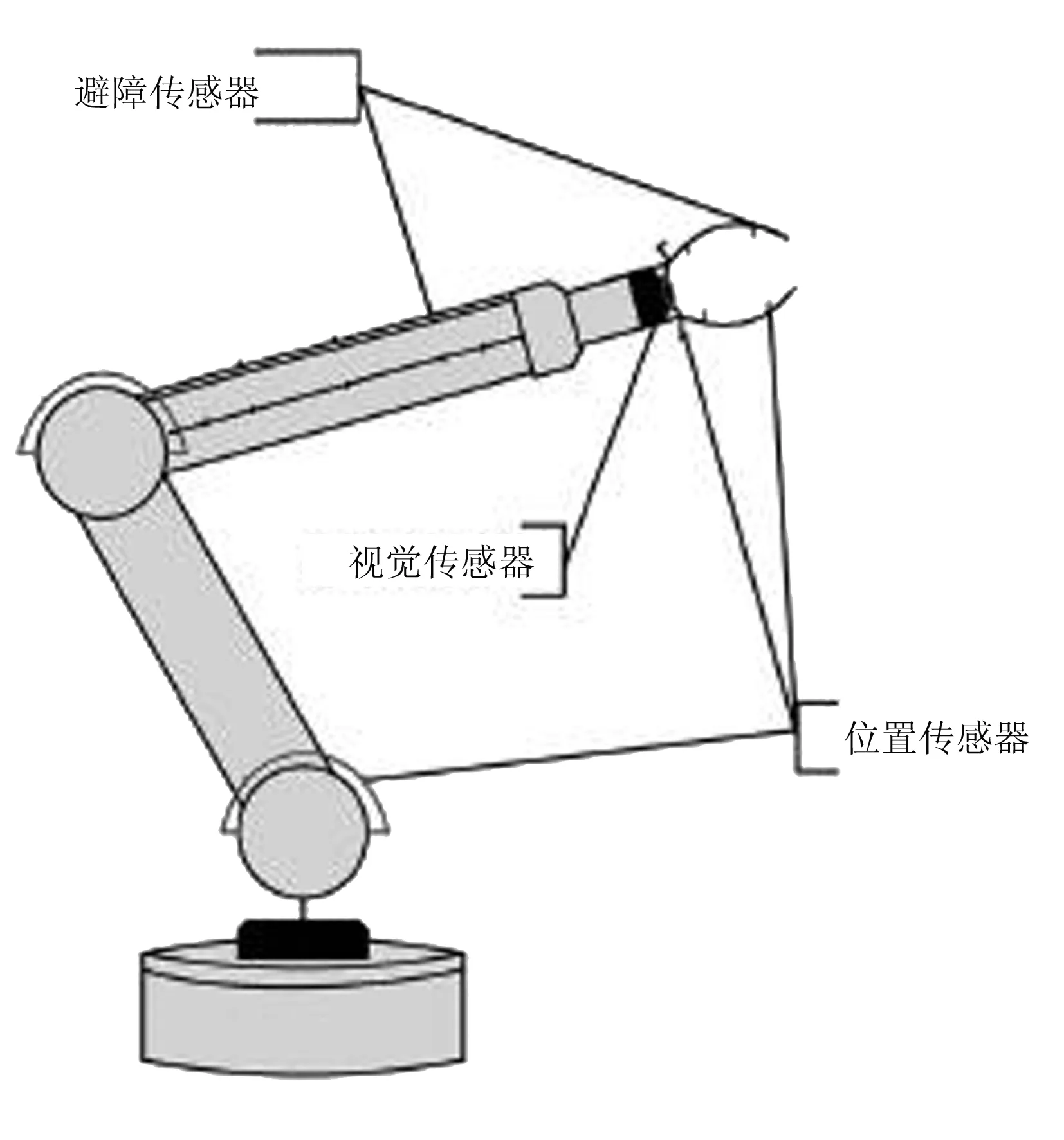
图3 采摘机器人感知系统Fig.3 The perception system of picking robot
视觉传感器主要是进行图像的捕获及位置的校验,然后将结果传送到机器人控制系统;位置传感器是利用旋转关节和霍尔传感器得到机器人的直行进程,获取机器位置信息;避障传感器安装在末端执行器上,通过力敏电阻获取碰撞信息,然后让机器人在作业中有效躲避障碍。
3.2 无线通信系统软硬件设计
无线通信系统硬件需要满足数据传输速率、通信距离、发射功率、综合承载能力、丢包率、误码率和低功耗等要求,其结构框架如图4所示。无线通信系统包括通信主站和从站两方面。主站由控制计算机、处理器和无线网络控制器(RNC)组成,这几部分通过 USB 有线传输数据信息;从站则由视觉、避障、位置3类传感器和无线网络控制器(RNC)构成。主站通过基站接收从站发回的数据及控制信息,实现采摘机器人的无线通信。
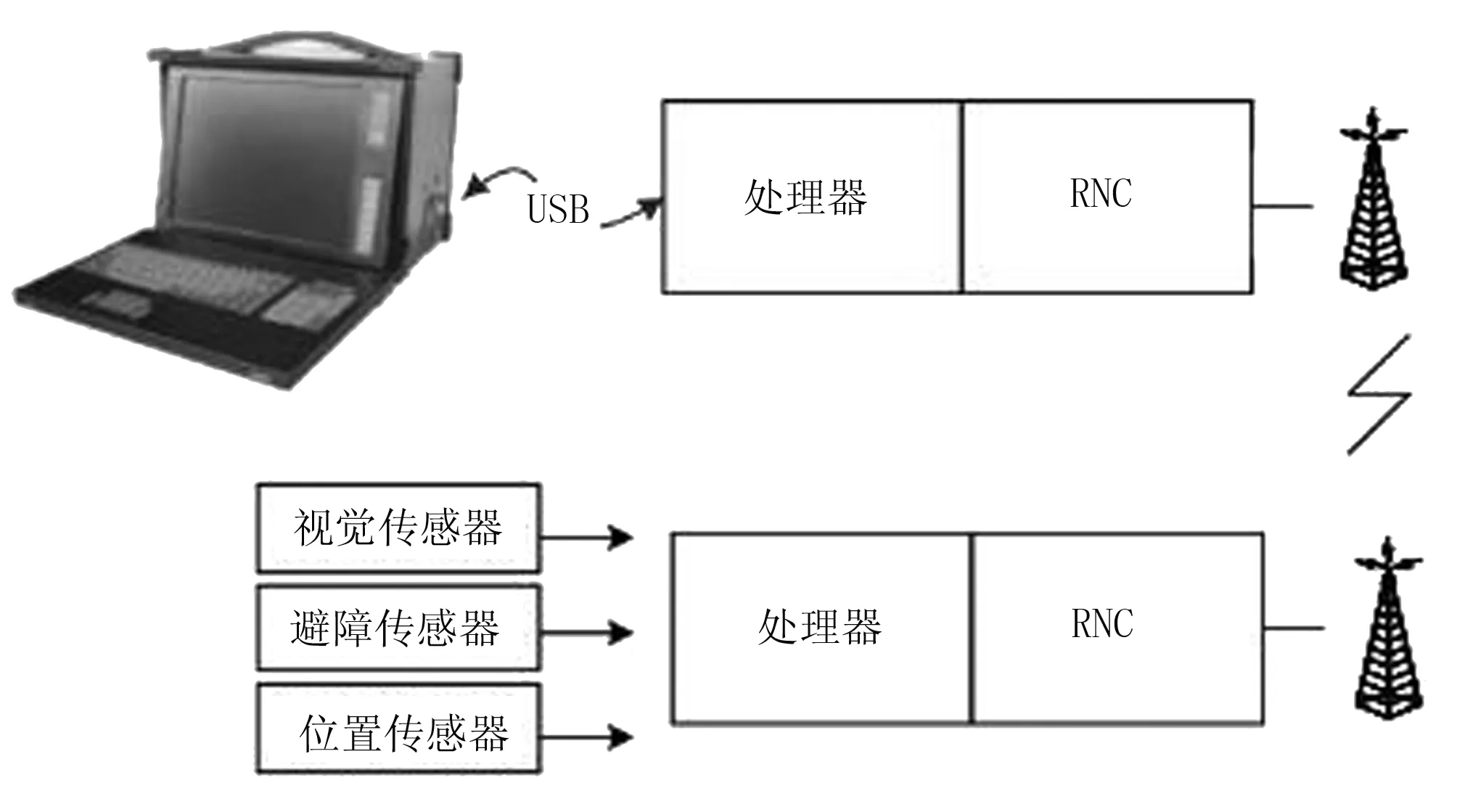
图4 无线通信系统硬件框架Fig.4 The hardware framework of wireless communication system
无线通信系统软件部分主从机数据接发都采用中断服务程序机制,具有成本低、数据延时小、实时性高等特点。该系统软件包括main、数据接收、数据发送、接收中断服务和发送中断服务等子程序。发送程序和接收采用模块化方式,由main系统主程序直接调用,发送中断服务程序是在数据接收同步后开始发送数据信息,而接收中断服务程序是先发送文件然后再等应答信号。采摘机器人无线通信系统流程如图5所示。
3.3 无线通信系统数据质效与协议
采摘机器人无线通信系统需要实时、有效地进行数据信息的发送与接收,因此要求系统具有高传输速率、足够远的通信距离、低丢包率和低误码率[26]。但是,由于采摘机器人工作环境恶劣,工作场所变换速度快,且其本身控制系统复杂,可能会给数据信息的发送和接收造成干扰,影响无线通信系统的的通信距离和丢包率。为了确保该系统数据发送和接收的准确性,需要对其进行质效控制。而数据传输协议则是根据采摘机器人自身信息传送情况设定某种特定协议确保链路数据准确无误地进行传输。
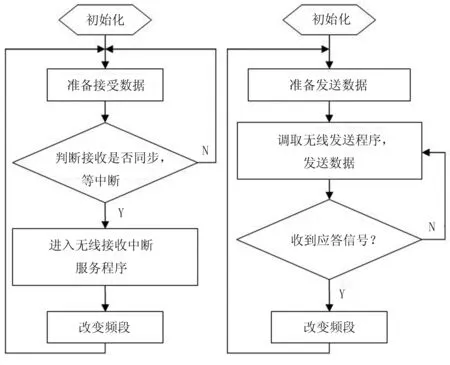
图5 无线通信系统软件流程图Fig.5 The software flow chart of wireless communication system
3.3.1 质效控制
影响无线数据传输的主要因素除了环境、磁场、天气这些外在因素之外,还有通信距离、发射功率、综合承载能力及系统抗干扰能力等自身因素;也还有地面对电波传输的影响,这部分主要是地形起伏、植物、任意尺寸的人造结构和作业海拔等对信号的遮挡。此外,基站的类型及其对信号的传输能力和基站的高度也是影响无线传输的重要因素[27]。因此,提高基站的增益和水平高度,就能提高通信系统的质量和距离。对采摘机器人无限通信系统而言,质效控制主要在于优化自身参数和采用跳频传输机制。
该无线通信系统优化自身参数,首先是对频率、发射功率和综合承载能力等3方面进行优化。工作频段设定为433 MHz,而系统发射功率和综合承载能力则与信号传送的距离息息相关。发射功率大,则信号传播的远,信号传送的距离也大;综合承载能力反应的是主机获取微弱信号的能力,该值越大,通信距离越大。在三维空间中,无线通信传送距离公式为
[Ls]=32.44+20lgd+20lgf
(3)
其中,[Ls]为传输损耗(dB);d为传输距离(km);f为工作频率(MHz)。
根据式(3)和工作频率433MHz下的发射频率和综合承载能力,计算出的传输距离为2.4 km。这个计算结果是理想状态下的值,在实际应用中,由于受到干扰,会使实际值与理论值相差甚远。但由于采摘机器人无线通信系统主从站都距离较近,即使实际值和理论值存在较大差距,也不会影响其数据信息的传输。
3.3.2 通信协议
通信协议对无线通信系统信号的传递具有重要的影响,因此设计性能卓越的协议是整个系统的重中之重,而数据包格式又是通信协议设计的重点,无线通信数据的接发都按照数据包装机制实行。采摘机器人无线通信系统的数据包格式如表2所示。
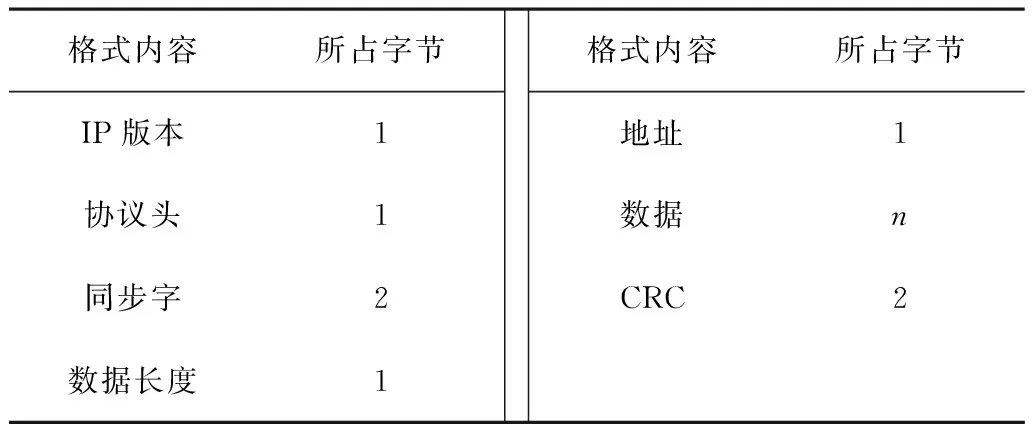
表2 数据包格式Table 2 The digital formats
在数据传输过程中,为了减少外在干扰对数据的影响,在传递数据信息时,一般在数据中加上1个字节的协议头。同步字是用来保证数据的发送和接收前双方通信处于同步状态。数据长度一般为1个字节,有其他需要时可适当进行调整。数据为传输过程中的有效数据,也就是采摘机器人无线通信系统中的感知信息。CRC16是校验值,用来判断数据传输的正确性。
4 测试结果与分析
无线通信系统设计和实现后,需要对数据传输进行一系列的测试,以便确定系统设计是否合理准确。因此,为了测试该无线通信系统性能是否满足采摘机器人长时间工作要求以及验证该系统的可行性和有效性,特在某水果种植园进行了实际测试。采摘机器人无线通信系统数据传输的一组随机试验情况,如表3所示。

表3 采摘机器人无线通信系统测试数据Table 3 The test data of wireless communication system for picking robot
试验条件如下:作业环境为强磁干扰;基站增益为3 dB ;数据传输速率为1.2 Mbps;数据长度为1M。
从表3可以得出:在整个数据传输试验中,无线通信系统在质效控制和通信协议措施下,丢包率为0,说明制定的传输协议合理,数据能够准确高速的接发。在测试中,数据传送差错表现为误码率,但也比较低,没有给通信过程带来干扰。经分析可知:此采摘机器人数据传输率较高、CBTC传输延时小、丢包率为0、可靠性强,符合采摘机器人无线通信系统的设计要求。
5 结论
本文以LTE-Advanced和微粒群算法为通信路径搭建的采摘机器人无线通信系统,采用高效的质效控制和通信协议,通过减少通信协议层数和减少了网元数目,降低了系统故障率,延长了系统维护周期,使网络部署更加简单,很大程度地提高了网络稳定性。测试结果表明:该无线通信系统数据传输率较高、CBTC传输延时小、丢包率为0、可靠性强,符合采摘机器人无线通信系统的设计要求,对实现果实采摘无人化具有十分重要的意义。
[1] 王振,赵祥模,徐志刚. 无线传感器网络(WSN)技术在小型组足球机器人比赛中的应用[J].电子设计工程,2015(14):70-72,76.
[2] 吕家亮,王英龙,毛玉明,等.基于决策思想的微粒群三维定位算法研究[J].计算机仿真,2015(1): 322-326, 348.
[3] 杨本初.面向工业应用的嵌入式无线通信网络的实时性开发研究[D].西安:西安建筑科技大学,2005.
[4] 田果.基于无线通信网络的遥操作工程机器人系统控制策略研究[D].广州:广东工业大学,2014.
[5] 周渝.农业多机器人系统无线通信技术研究[D].杨凌:西北农林科技大学,2014.
[6] 乔莹莹,宋威,马伟.基于GA优化QPSO算法的文本聚类[J].计算机应用研究,2014(10):2912-2915.
[7] 赵志刚,王伟倩,黄树运.基于改进粒子群的双层规划求解算法[J].计算机科学,2013(S2):115-119.
[8] 曾建潮,崔志华.微粒群算法的统一模型及分析[J]. 计算机研究与发展,2006(1):96-100.
[9] 吴建生,秦发金.基于MATLAB的粒子群优化算法程序设计[J].柳州师专学报,2005(4):103-106.
[10] 杨尹,顾寄南.上下料机器人与数控机床群无线通信系统设计[J].制造业自动化,2012(18):9-10.
[11] 李琴,杨栩沣.一种融合分布估计的离散粒子群优化算法的配电网重构[J].长春工程学院学报:自然科学版,2012(2):43-45.
[12] 刘银萍.基于PTR6000的足球机器人无线通信系统的设计[J].现代电子技术,2012(9):45-47.
[13] 杨艺.基于微粒群的LTE-Advanced通信系统自适应资源分配算法[D].哈尔滨:哈尔滨工业大学,2011.
[14] 吕继东,赵德安,姬伟,等.苹果采摘机器人无线数据传输系统[J].农业工程学报,2010(12): 225-230.
[15] 廖小春,姚远程.小型足球机器人无线通信系统的设计与实现[J].现代电子技术,2010(15):67-70.
[16] 高倩倩,须文波,孙俊. 量子行为粒子群算法在基因聚类中的应用[J].计算机工程与应用,2010(21): 152-155.
[17] 李占坤.果树采摘机器人控制系统研究与设计[D].镇江:江苏大学,2010.
[18] 张敏.基于LTE-Advanced系统的LDPC码编译码算法研究[D].重庆:重庆邮电大学,2010.
[19] 郝武伟,曾建潮.基于聚类分析的随机微粒群算法[J]. 计算机工程与应用,2010(8):40-44.
[20] 侯志宏.LTE/LTE-Advanced链路级若干关键技术仿真研究[D].北京:北京邮电大学,2010.
[21] 冯宇,于竹林.基于嵌入式移动机器人无线通讯系统的实现[J].电子科技,2009(7):66-68.
[22] 胡宏梅,董恩清.基于粒子群算法的码书设计研究[J]. 微电子学与计算机,2009(1):97-100.
[23] 邱铁,李哲,司伟生.基于无线通信的嵌入式机器人控制系统设计[J].国外电子元器件,2008(8):3-5.
[24] 刘锋,黄志斌,李丽娟,等.一种启发式粒子群优化算法(HPSO)及其在结构优化设计中的应用[J]. 应用基础与工程科学学报,2008(1):57-64.
[25] 彭日亮,杨宜民,王赟. 基于PTR4000的足球机器人无线通信子系统的设计[J].计算机工程与应用, 2007(17):108-110.
[26] 徐琰.基于无线局域网的消防侦察机器人通信系统设计[J]. 机械,2006(6):7-8,11.
[27] 王云刚,陈继荣,陈保林.网络控制机器人无线通信系统的设计[J].计算机工程与应用,2006(17):123-126.