基于螳螂前足的香蕉纤维提取刀片仿生设计
2018-03-28张喜瑞
曾 成,梁 栋,张喜瑞,李 粤
(海南大学 机电工程学院,海口 570228)
0 引言
仿生学通过研究生物的结构、性状、原理、行为,为工程设计、设计优化及产品改进等许多方面提供了新思路、新原理。自然界数十亿年来的演变进化,每一种生物都具有其独特的生理结构帮助它生存。人类很早就开始模仿学习并且从中受益,这也是我们技术创新不断学习的源泉之一[1-2],通过观察动物的某一性状获得启示,进而为解决问题提供灵感。仿生学是联合了生命科学、数学、物理学、工程学等多方面的交叉学科,有着广阔的研究前景,为本文的刀片优化提供了一个很好的新思路。
螳螂是优秀的捕食者,捕食动作迅猛而准确。在捕食行为当中,它前足上的胫节和腿节布满了锋利的齿刺[3-4],这些齿刺能够刺入猎物的身体并且牢牢控制住猎物的行动直到捕食行为的完成。这种齿形结构在加工领域应用广泛[5],作为切割刀具可减阻降耗,有着重要的仿生意义。
移动式香蕉茎秆纤维提取机[6-7]工作结构与传统的麻类制取机械相似,主体的工作部分是通过刮刀辊上加载的刀片对水平送入的香蕉茎秆不断的击打与刮取[8]。现有的纤维刮取刀片材料通常为角钢,通常采用平刃结构,结构呈L型,一端通过螺栓固定在刀辊上通过刀刃刮取喂入的茎秆纤维。刀片的工况直接影响着机器的工作效率,优化刀片结构可以有效提高整机的工作性能。
本文通过对螳螂前足的形态研究,模仿箭螳的齿刺结构设计出两种锯齿形的仿生刀片,利用这种结构形态的特点来提高香蕉纤维提取机的工作效率。将设计好的仿生刀片与常用的平刃刀片通过试验进行对比,观察纤维制备率和含杂率的变化情况来验证仿生优化刀片的可行性。
1 仿生刀片的工作原理及设计加工
1.1 刮杂装置的工作原理
在麻类制取机械当中,一般采用平刃刀片,具有造价低及易于加工的特点。香蕉茎秆纤维提取装置主要的工作流程如图1所示。辊刀通过安装好的L型平刃刀片顺时针旋转击打水平送入的茎秆纤维叶片来刮取植物纤维,获取到的粗纤维通过下方一对输出辊收集,由皮带轮带出;杂质由于质量相对较大随着刀轮的运动轨迹做离心运动从下定刀上方飞出。整个刮取装置实现了自动将粗纤维与杂质分离。
实际操作发现,原刀片在一次喂入多片以上时提取率有较大程度下降,可能是因为随着喂入片数的增多,加工时纤维厚度相对增加,刀片在刮取时无法充分接触茎秆纤维。考虑到效益问题,一次喂入片数通常在3片以上,如何解决效率下降的问题是刀片优化需要考虑的问题之一。另一个不足是因为香蕉茎秆纤维相比于一般的植物纤维,具有含水量高、强度小、易断裂的特性。平刃刀打击强度大,力的作用点近乎在一条直线上,很容易造成茎秆纤维断裂形成碎纤维杂质[9],导致收集到的粗纤维含杂率高;同时,也容易导致在送入茎秆叶片时碎纤维在回收分离区发生缠绕,粗纤维无法正常卷入输出辊形成堵塞。如何增大刀具与纤维面的接触面积提高加工效率、减小刀具在加工时对植物纤维的破坏(提高成品率减少堵塞),是本文仿生优化的主要方向。

1.刀轮 2.纤维 3.上定刀 4.运动轨迹 5.输出辊 6.下定刀 图1 刮杂装置刀具运动轨迹Fig.1 The blades movement of the scraping device
1.2 仿生刀片的设计理念
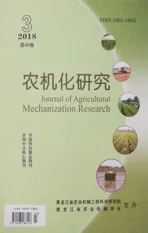
本研究中的螳螂捕获于海口市郊外(见图2),学名箭螳[10],身形较长,在我国与马来西亚均有分布。
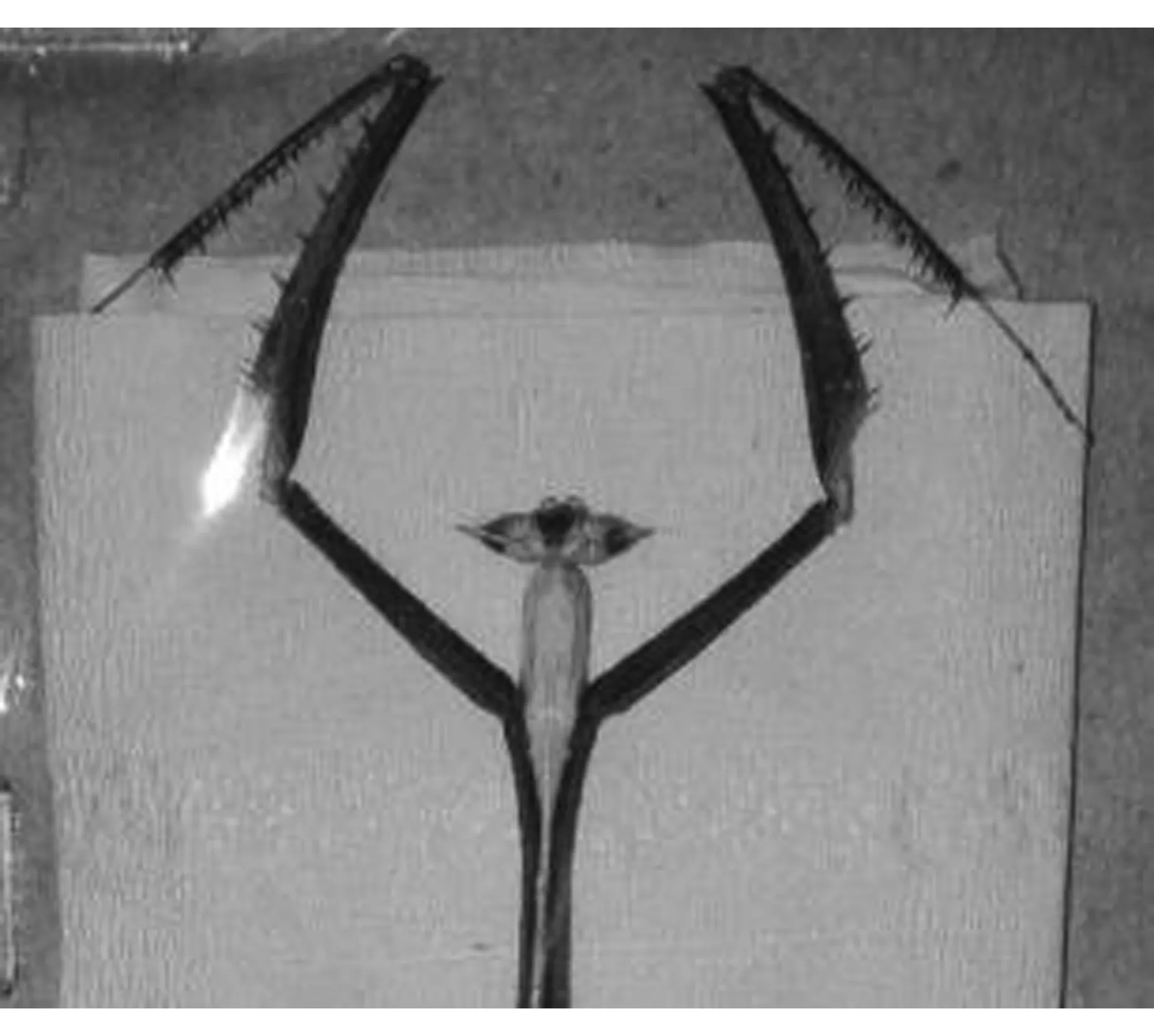
图2 螳螂标本Fig.2 The Mantis specimens
样本体长约60~70mm,中前足的腿节和胫节长度总共约为26.78~36.49mm。观察它的前足结构:
前肢修长,胫节向内折叠,形状与镰刀相似,腿节和胫节上有体刺均匀分布其中。其腿节上的刺大小基本相同,均匀分布腿节上;胫节上的齿大小不一,但可以大致分为大齿与小齿,这些体刺能够帮助它捕捉并且固定猎物。根据腿节与胫节体刺的两种分布模式,尝试将腿节上齿刺均匀分布与胫节上大小齿交错排列分布这两种排列方法分别应用到刀片设计当中。
1.3 仿生刀片参数设计
刀片仿生主要以螳螂的前足尤其是胫节内侧上的齿形分布为依据,通过实际对标本箭螳的前肢测量发现:腿节上的齿与胫节上的大齿尺寸相似,齿的宽度大约占整个前节宽度的40%~60%,小齿大小约为大齿的50%。考虑到齿的加工难度,加工的齿宽约为刀片厚度1/2,大小齿相同,可根据齿宽,在范围内合理选取齿高。
原刀片为L型、Q235角钢,原平刃刀刀片的尺寸如图3所示[11]。考虑到刀片在车辊上的安装及加工时与上下定刀间的距离,仿生刀片不改变原有尺寸,将原有的平刃部分改成两种不同的齿形排列结构A和B。齿均安装在靠近加工的一侧,刀片的厚度约为3mm,齿的宽度大约占整个厚度一半即可。将仿生刀A设为齿高4mm的四棱锥均匀排列,齿顶部处于同一水平线上,齿底面均为等边三角形。仿生刀B分别为齿高2.5mm与齿高4mm的大小齿交错排列,底面同样为等边三角形,齿顶面不处于同一水平线上,如图4所示。将设计好的刀具进行加工生产,然后进行试验。

图3 平刃刀刀片尺寸Fig.3 The figure of the flat blade
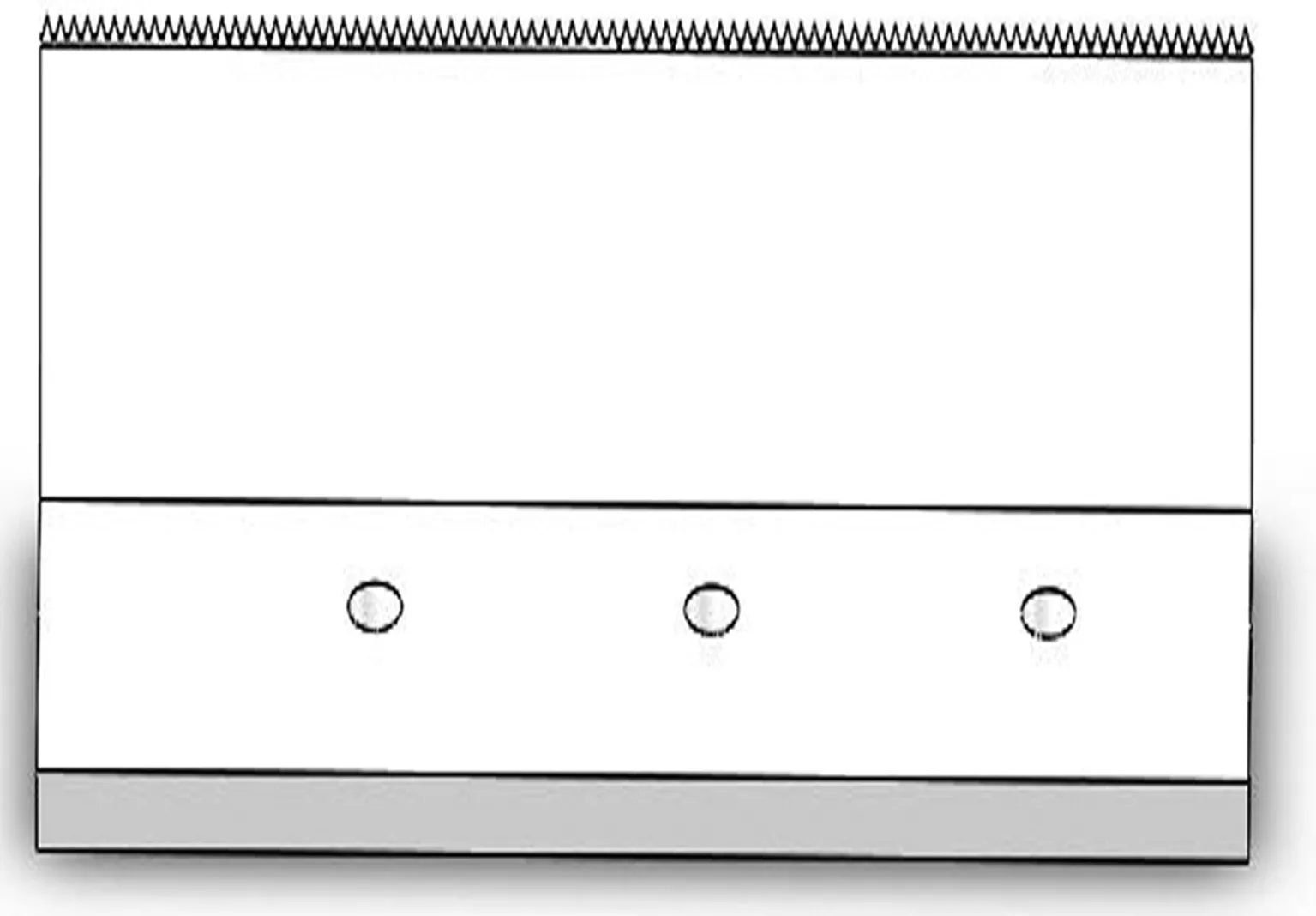

(a)
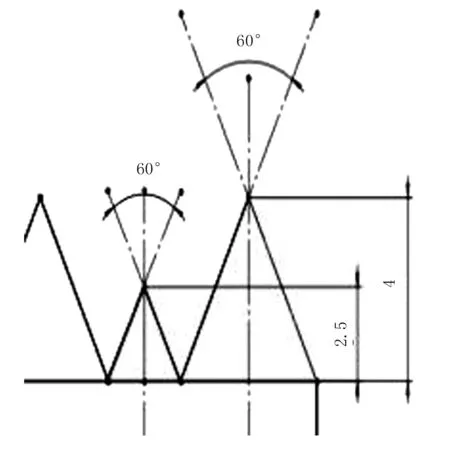
(b) 图4 齿形刀(a)、(b)结构图Fig.4 The structure and three dimensional schematic diagram of the tooth blade A and B
2 仿生刀片与普通刀片对照试验
2.1 试验方案
试验的主要目的在于考察仿生刀片相对于普通的平刃刀片的实际优化情况,以及在喂入片数增多的情况下仿生刀是否更加稳定。因此,将刀具与茎秆喂入片数作为对照试验中的变量,将纤维制备率和含杂率作为试验优化结果的重要指标。
将试验分为3个区组,为了减小误差,需要进行多次重复取平均值,减少无关因素的影响。A组选用齿形刀A,B组选用齿形刀B,C组选用普通的平刃刀片。每组分别喂入N(N=1,2,3,4)片茎秆片,每一实验重复5次结果取平均值,如表1所示。每次试验间隔10min,试验人员负责观察清理机器工作区以及收集区,保证机器良好运转。
表1 因子水平表Table 1 Order list of experiment level
2.2 试验材料及设备
本试验材料取自海南大学农学院实验室所种植的巴西蕉。香蕉茎秆纤维为片状,通过手工拨片可以明显发现香蕉茎秆纤维层状分布。加工一般选取的层数范围为2~5层,最外层的表皮因为可能受到破损及纤维含量过高不适于加工,同时最内层的含水量过高纤维含量低同样也不适于加工[12-13]。考虑到本次试验对于实验准确度要求较高,故试验材料均只采用2~3层的茎秆纤维。茎秆长度均取值1.5m左右,水平最大宽度0.09m,保证每一片茎秆纤维质量500g左右,浮动不超过15g。试验机器包括移动式全喂入香蕉茎秆纤维提取机、cp423S型高精度电子天平及DHG202-0B型电子真空干燥箱。
2.3 试验指标与试验结果记录
试验主要测量两个指标:纤维提取率与含杂率。纤维提取率是衡量纤维提取机提取纤维能力的重要衡量标准,试验中收集到的粗纤维由出料装置收集,收集之后注意不要沾上泥土。不清洗直接通过电子真空干燥箱干燥(防止水洗掉需要检测的部分杂质对实验结果产生影响),烘干测得所得粗纤维质量m1。
刮制到的粗纤维的制备率θ为
(1)
式中m1—提取后粗纤维(烘干)质量(g);
m—一次喂入的茎秆片的质量(g)。
含杂率也是本次测试的一个重要指标,齿形刀片相对来说能够更好地保护植物纤维,减少碎麻产生。因此,含杂率是否有相对减少也是本次仿生优化的目的之一。将烘干的粗纤维使用钢刷轻轻梳理纤维并重复称量,当梳理前后质量浮动不超过0.1g时,测量最后剩下的纤维质量m2。
提取到的香蕉纤维的含杂率为
(2)
式中m2—反复梳理后剩余的粗纤维质量(g);
m1—烘干后粗纤维的质量(g)。
最后得到的试验结果如表2所示。

表2 试验结果记录表Table 2 Record of experiment results %
3 试验结果分析
3.1 数据处理
普通香蕉茎秆纤维含水量在80%~85%左右,考虑到机器的工作效率,纤维含量大约处于10%~16%之间,因此试验数据处于有效范围。
用SPSS软件分别将纤维制备率和含杂率分别进行显著性检验[14-15],来判断刀具刃口形状与一次喂入片数对纤维提取率与含杂率是否有显著影响。
建立假设H0:刀具或喂入片数对于纤维提取率无显著性影响。
建立方差数据分析表格(见表3和表4),显著性水平α取0.05。

表3 纤维制备率方差分析表Table 3 The variance analysis of fiber extraction ratio

表4 含杂率方差分析表Table 4 The variance analysis of impurity ratio
由表3可以看出:对于指标纤维制备率,刀具因子的P值小于显著性水平α,因此拒绝原假设,可以认为刀具的选择对于纤维提取率有显著影响。
同理,也可以得出刀具选择对含杂率有显著影响。值得注意的是,喂入片数的P值同样小于显著性水平α,对于含杂率也有显著影响。
3.2 数据分析
由表2发现:A、B组的纤维制取率要优于C组,平均纤维制备率都在15%左右;而C组纤维制备率平均在13%左右且波动较大,尤其在加工多片茎秆纤维时,效率明显下降;B组的齿形刀加工效率稍优于A组的齿形刀。考虑到茎秆中80%以上都是水分,纤维提取率已经有了显著的提升。
试验发现:随着每次喂入的片数增加,纤维制备率有所下降,尤其是C组平刃刀片效率有明显的下降,从喂入1片到4片下降了大概2.5%。原因为:随着片数的增多,茎秆纤维没有与刀片充分接触导致[16];而A、B组影响较小,显示了齿形刀在加工过程中相对于平刃刀与茎秆的接触面积更大,作业面充分接触提高了加工效率。在多片喂入时,仿生刀片具有很好的工作性能,且B刀较于A刀效果更好,平均的纤维提取率高0.5%左右
从含杂率指标看,C组含杂率平均在14%左右,A组11.5%左右,C组11%左右。由此可知,仿生的齿形刀能够有效减少含杂率及收集区的缠绕堵塞,提高最后实际制得的纤维质量。A、B齿形刀含杂率相近,B型齿形刀同样略好于A型齿形刀。
综上分析可得:齿形刀B(大小齿交错排列)为香蕉纤维提取机械刀片最优选择。
4 结论
1) 原L型刀片在大量制取香蕉茎秆纤维时加工效率较低,且加工时碎麻较多,易发生堵塞。
2)通过观察螳螂前足结构,模仿螳螂捕猎时前肢的齿刺结构,设计出大小齿交错排列的齿形刮麻刀片,提高了纤维制备率,减少了含杂率。
3)试验数据表明:设计的齿形刀使纤维制备率从平均13%提升到了15%,含杂率从14%降低至11%左右。仿生刀片相对于原刀片加工效率有着显著提升。
该研究所应用的仿生学原理对于纤维提取机械刀具的后续研究与优化中提供了借鉴与技术支持。
[1] 孙久荣,戴振东.仿生学的现状和未来[J].生物物理学报,2007(2):109-115.
[2] 刘福林.仿生学发展过程的分析[J].安徽农业科学,2007(15):4404-4405,4408.
[3] 邢威.古老的杀手—螳螂[J].化石,2012(3):30-34.
[4] 崔发良,王昌贵,方丽,等.广斧螳螂生物学特性观察与保护建议[J].山东林业科技,1997(6):28-30.
[5] 苏国胜.高速切削锯齿形切屑形成过程与形成机理研究[D].济南:山东大学,2011.
[6] 李成斌,梁栋,张喜瑞,等.滚刀刮拉式香蕉茎秆纤维提取机的设计与试验[J].农机化研究,2015,37(6):127-131,135.
[7] 张喜瑞,梁栋,李粤,等.移动式全喂入香蕉茎秆纤维提取机的研制与试验[J].农业工程学报,2015,31(19):22-30.
[8] 郑侃.一次喂入反向式香蕉茎秆纤维提取机关键部件研究[D].海口:海南大学.2014.
[9] P hbiata,李正.香蕉纤维的物理化学特性[J].国外纺织技术(纺织分册),1993(7):4-5.
[10] 葛德燕,陈祥盛.中国螳螂目昆虫的研究进展[J]. 山地农业生物学报,2004(6):525-528.
[11] 董西军.基于SolidWorks的参数化设计[J].机械制造与自动化,2007(2):26-27,30.
[12] 熊月林,崔运花.香蕉纤维的研究现状及其开发应用前景[J].纺织学报,2007,28(9):122-124.
[13] 熊月林.香蕉纤维的制取及其结构理化性能研究[D].上海:东华大学.2007.
[14] 王创.统计假设检验中显著性水平α的选择[D].兰州:兰州商学院,2013.
[15] 姚菊香,王盘兴,鲍学俊,等.相关系数显著性检验的几何意义[J].南京气象学院学报,2007(4):566-570.
[16] 欧忠庆,张劲,李明福,等.香蕉茎秆刮麻机的研制[J].中国热带农业,2007(1):30-31.