盾构振动在线自动监控系统的设计与研究
2018-03-27张阐娟蒙先君李大伟吴朝来孙海波
张阐娟, 蒙先君, 李大伟, 吴朝来, 孙海波
(中铁隧道局集团有限公司专用设备中心, 河南 洛阳 471009)
0 引言
近年来,随着国民经济的发展,城市地铁、过江隧道以及地下综合管廊等项目逐渐增多,盾构作为集机、电、液于一体的大型挖掘设备被越来越多地应用于隧道施工中[1]。由于盾构内部系统具有一定的关联性,且施工现场环境恶劣,一旦某个系统的零部件出现故障很可能会造成整个盾构设备的停机,不仅影响施工进度还会引起巨大的经济损失。因此,在盾构运行过程中对其关键设备进行在线自动监测并及时做出相应预警就显得尤为重要。
在设备在线监测方面,文献[2-3]对风电设备的振动在线监测进行了研究,文献[4-5]对冷轧机组和配电变压器的振动在线监测进行了研究,在线监测技术日趋完善。但在盾构施工领域,只有极少部分单位开展了设备监测工作,大部分单位仍然更多地依靠人员的经验和个人能力,采用“眼看、手摸、耳听”等方式对设备进行现场判断。即使开展设备监测工作的单位也只是采用离线式数据采集的方式进行,尚无综合性、系统性的研究。
目前,盾构的部分子系统自带本地监控装置,主要是针对单个设备的运行压力、液体流量、工作电流、刀盘转矩、轴承运转时间及转速等物理量进行监控;但是本地监控装置所输出的信息量有限,不足以全面反映设备安全运行状态[6]。由于机械设备在工作过程中以固有的规律运行,可通过分析采集到的振动信息[7],对机器故障进行提前预警并做出相应诊断。基于此,本文设计了一种采集盾构主轴承、液压泵和减速机等设备振动值的装置,将监测到的振动数据进行实时收集汇总,并上传至在线监控中心、建立数据库,方便信息的存储、查询,做到发现故障及时预警。
1 系统总体设计
盾构振动在线自动监控系统主要包括被监测设备、数据采集器、数据集中器和数据监控中心4部分。其中,被监测设备有盾构的主轴承、主驱动电机、减速机、主泵站电机和液压泵等大功率机械设备;数据采集器是一个模块化装置,主要采集被监测设备振动值的变化,其内部由振动传感器、滤波器、放大器、A/D转换器、嵌入式处理器等电子器件组成;数据集中器是一种高度集成的新型嵌入式智能通讯装置,用于实现在线监控系统现场的信息收集;数据监控中心包含安装了SCADA监测软件的PC机及PC机内部运行的MySQL数据库。系统结构框图如图1所示。
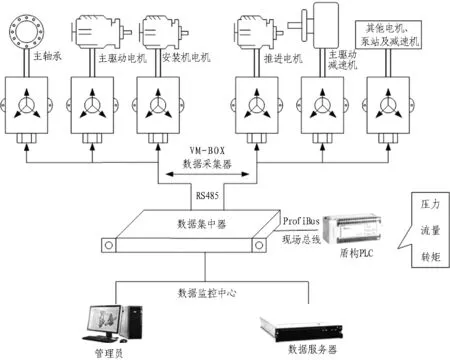
图1 盾构振动在线自动监控系统结构框图
振动传感器终端节点将采集到的盾构关键设备的振动信号通过数据线传送至VM-BOX数据采集器进行分析处理,然后经过RS485串口将数据发送至数据集中器管控,最后将数据集中器收集的信息通过以太网集中送至当地数据监控中心或远方调度主站,完成数据处理、监控及预警。
2 系统硬件设计
在线监控系统主要完成盾构相关设备振动变化值的采集、数据处理和数据通讯等功能,其中硬件部分包括数据采集器和数据集中器等。
2.1 数据采集器
VM-BOX数据采集系统硬件主要包括以下4个部分: 振动传感器模块、信号调理转换模块、运算处理模块和电源模块。传感器模块是连接被测设备和测试系统的桥梁,将采集的物理信号转化成电信号。由于被测电信号在测量和传输的过程中存在各种噪声和削弱现象,需经过信号调理转换模块对被测信号进行放大、隔离、多路复用、滤波、激励和线性化处理,并将调理之后的模拟信号转化成便于微处理器读取和分析的数字信号。运算处理模块对传送过来的离散信号进行计算,实现信号的时域与频域分析。电源模块负责为数据采集系统运行提供所需的能量。VM-BOX数据采集系统硬件结构框图如图2所示。
传感器模块选择ADI公司的MEMS加速度传感器,型号为ADXL345,主要采集设备的速度、加速度和频率等参数[8]。嵌入式处理器硬件平台选用Freescale/NXP公司的32位ARM/Cortex-M0+系列Kinetis-M专用计量微处理器,其内核运行速度为75 MHz,主要包含了内存映射计算单元MMAU、高精度 ∑-Δ模数转换器ADC、可编程增益放大器PGA、高精度参考电压Vref、Flash/RAM内存单元、比较器CMP和RTC等外设。数据采集器与外部数据集中器之间的通讯接口采用RS485接口且波特率根据需要可调节。EEPROM存储器与CPU的连接采用I2C总线,选取的型号为AT24C08,可提供8 kB的存储数据。电源模块内部设计主要采用DC/DC变换器,将24 V直流电转换成5 V直流电为系统运行提供所需的能量。
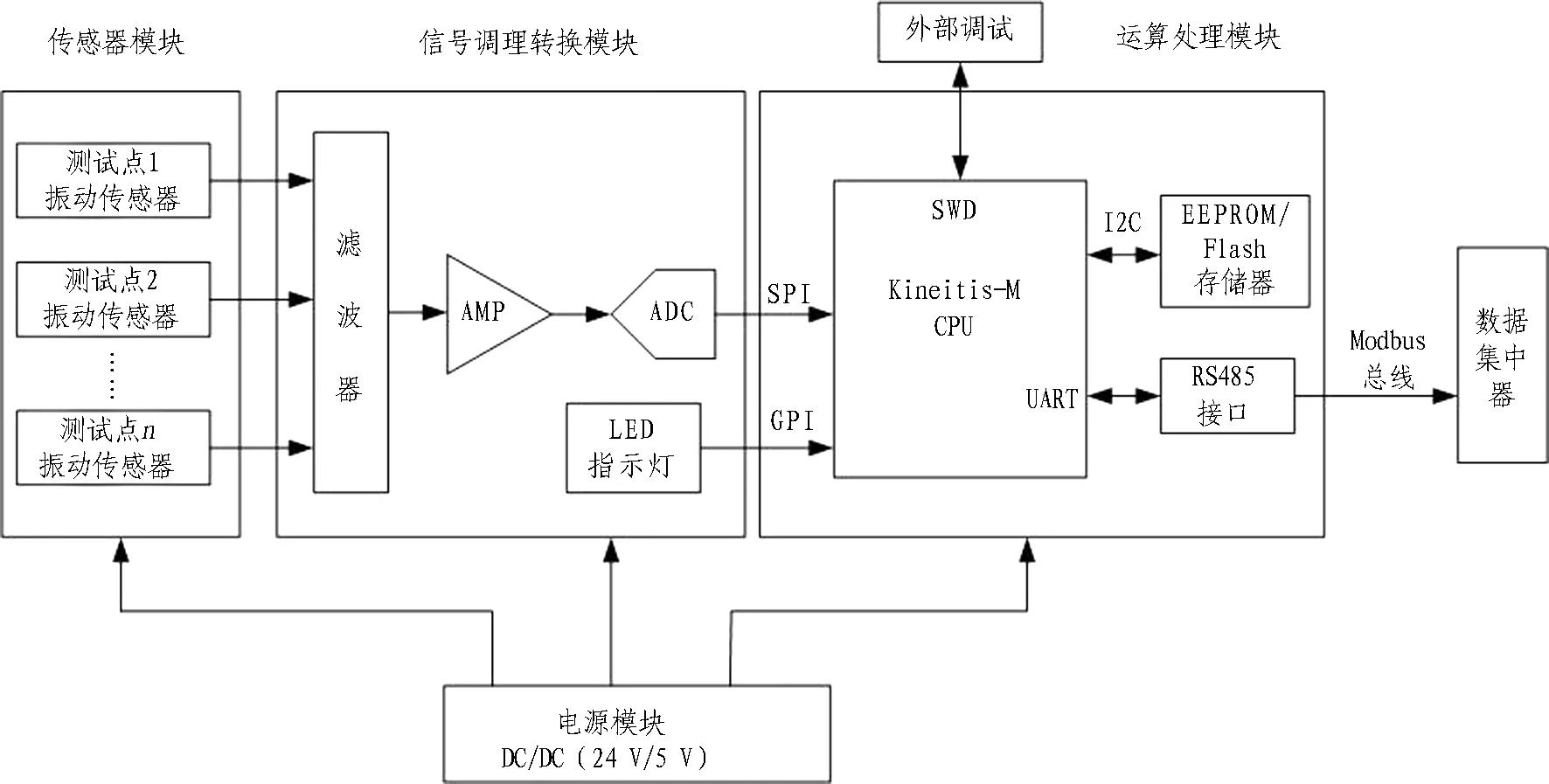
图2 VM-BOX数据采集系统硬件结构框图
2.2 数据集中器
考虑到被监测设备体积较大且振动采样点相对分散,需设计数据集中器将采集到的大量数据集中传至上位机,要求数据集中器具有较快的运行速度和较强的数据处理能力[9],为此选用带有32位uCLinux嵌入式操作系统的ARM处理器作为数据集中器的核心部件。基于ARM内核的数据集中器具有以下特点:
1)无硬盘和风扇运行,硬件系统稳定可靠;
2)采用良好的开关电源,输入电压为直流100~375 V或交流85~265 V,输出电压为5 V,宽范围的电压输入可广泛应用于各种供电环境;
3)支持不同的通信串口(如RS-232、RS-422、RS-485)和以太网协议(如UDP、TCP/IP);
4)提供标准CDT、101、104或Modbus总线连接第三方SCADA。
3 系统软件设计
在线监控系统的软件架构主要分为4层: 采集层、基础层、诊断层和报警层。通过4层的数据采集、存储、分析和故障提醒,最终达到在线监控目的。系统软件设计主要包括数据采集、在线监控SCADA和数据库3部分。
3.1 数据采集器嵌入式软件设计
数据采集器是基于Kinetis-M嵌入式处理器平台,在IAR Embedded Workbench(7.60A版本)编程环境下将传感器模块节点采集到的振动变化数值经过信号调理转换输送给处理器进行分析处理[10]。数据采集器内部程序设计流程如图3所示。程序设计方法如下: 首先对ADXL345传感器节点进行初始化设计,包括配置传感器I/O口方向、接收缓存定义、延时、振动值写入、Kinetis-M处理器运行启动Boot程序并设置采集周期,将ADXL345传感器的Driver驱动程序复制添加到Z-Stack协议栈代码中;接着调用API函数进行硬件初始化,将数据打包并按照指定方式发送给Kinetis-M处理器,实现采样保持、数模转换、快速傅里叶变换FFT、参数(有效值、峰峰值、频率、速度和位移等)计算以及通讯规约处理等功能。
3.2 在线监控SCADA软件设计
SCADA软件是整个在监控系统的中心,具有实时监控、图表生成、数据存储、数据分析和安全报警等功能。系统支持对实时变量、开关变量、环累计量和字符串等数据类型的处理,并实现实时数据的计算和统计功能[11]。
在线监控系统的界面是基于跨平台组态软件PGC-EX2000系统的自定义界面组态工具来设计的,通过拖放自定义控件、设置控件属性、设置绑定关系并与现场实时采集的数据进行关联,设计出直观实用的组合界面[12]。PGC-EX2000系统设计动态显示盾构PLC参数变化的实时数据如图4所示,此掘进区段为砂层地质,由图可以看出盾构推力较大,其他数值正常。PGC-EX2000系统还可通过双击模拟量对象、开启Trendcurveplay程序以及图形组态工具graphedit对实时趋势曲线和历史曲线进行查看、统计和数据处理。
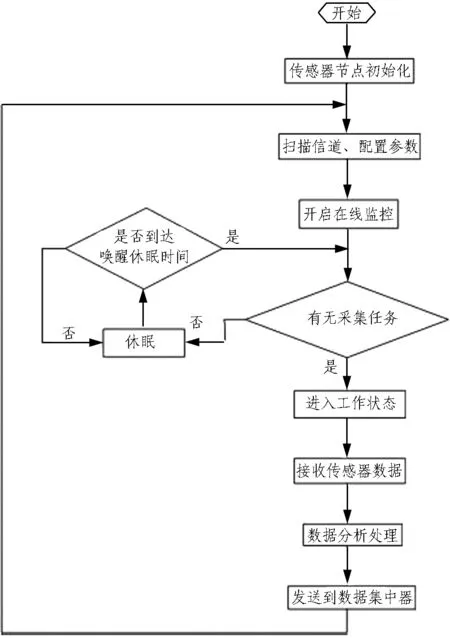
图3 数据采集器程序设计流程图
3.3 在线监控数据库设计
数据是盾构设备振动在线监控信息化管理的基础,数据的有效采集、存储、分析是系统功能稳定发挥的关键环节,而数据库是整个系统中数据处理、组织、分析和管理的核心,其设计的合理性直接影响到整个系统的开发和运行效率[13]。
盾构振动在线监控系统选用MySQL5.5作为后台数据库管理软件,应用程序通过开发数据源互联,配置连接到MySQL数据库。数据库查询语言使用结构查询语言。实时数据库功能模块主要完成实时数据的定义、编辑、修改,使整个网络系统的节点与驻留设备节点的实时库保持一致。根据盾构振动在线监控系统实际情况设计了3个数据库,分别为用户信息数据库、振动监控信息数据库和阈值信息数据库。每一个数据库采用一库多表的形式设计数据库结构,具体设计如下。
1)用户信息数据库: 主要存储用户的基本信息,包括用户注册信息、用户类别、用户权限和权限功能等。
2)振动监控信息数据库: 主要存储与盾构设备振动值相关的信息,如被测设备名称,振动节点位置、类型和状态,实时数据规范化存储,历史数据分类存储和监控情况记录等。
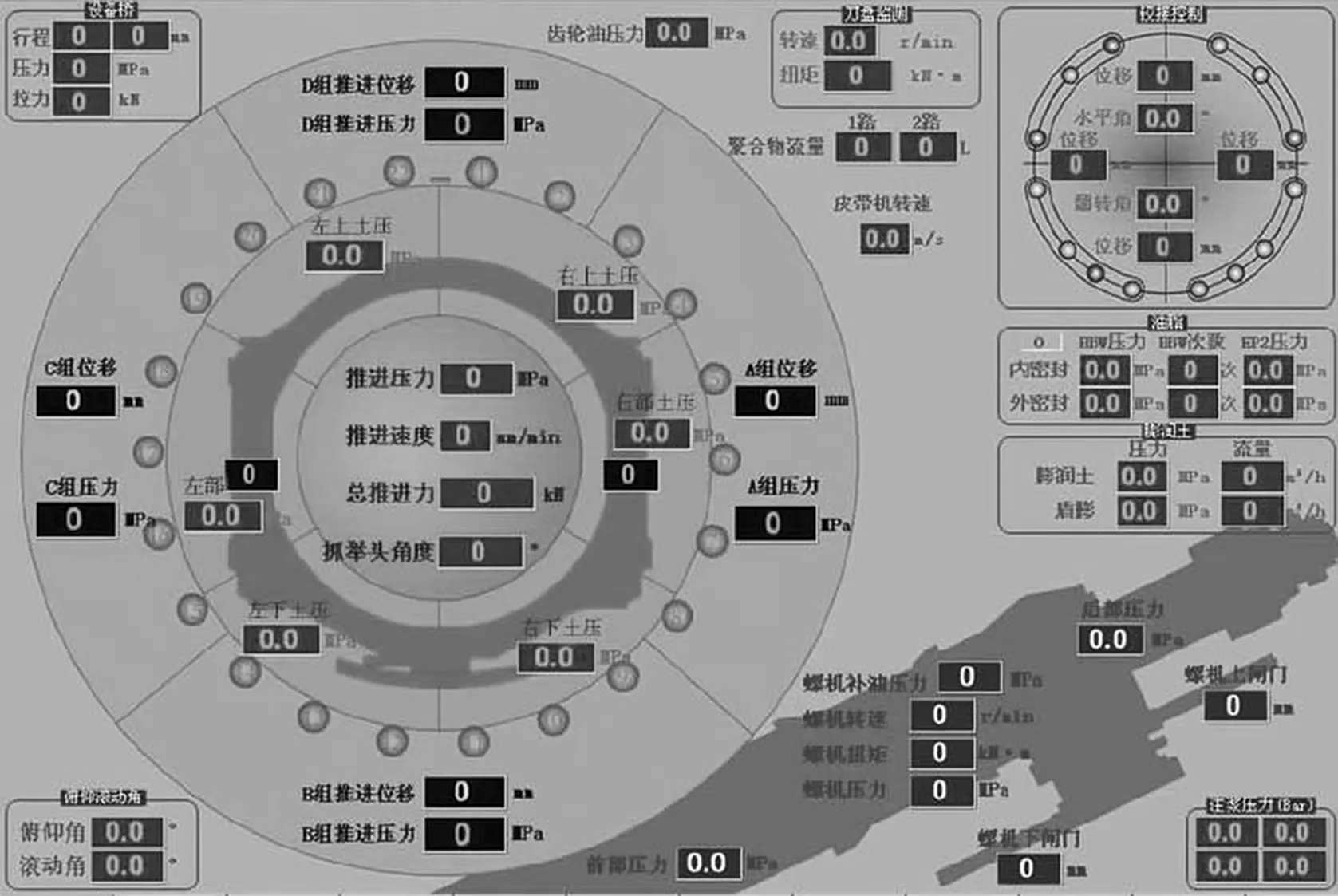
图4 PGC-EX2000系统设计的盾构PLC参数显示图
3)阈值信息数据库: 主要用于存储设备在不同运行状态下振动的上下限值,若监控数据超出阈值时系统启动报警功能。
4 系统测试
4.1 机械设备振动特性
机械设备的振动属于运动学范畴,设备振动特性可用运动学中的位移、速度、加速度物理量表示,三者之间的微分关系为
a(t)=v′(t)=d″(t)。
(1)
式中d(t)、v(t)、a(t)分别为机械振动位移、速度和加速度的瞬时值。
假设机械设备振动的瞬时位移
d(t)=Dcos(2πft),
(2)
由式(1)可推导出振动的瞬时速度和瞬时加速度:

(3)
a(t)=v′(t)=(2πf)2Dcos(2πft+π)=Acos(2πft+π)。
(4)
推导可得:
(5)
式(2)—(5)中:D、V、A分别表示振动位移、速度和加速度幅值;f表示振动频率值。
由式(5)可知,保持振动位移一定,其速度与频率成正比,加速度与频率的平方成正比,这与文献[14]所得结论一致。故设备的位移对低频振动较敏感,加速度对高频振动敏感,而振动的速度参量对频率的敏感度介于位移和加速度之间。因此,对高频运转设备故障(如滚动轴承、齿轮箱故障等),应选振动加速度作为参考量;监测设备低频故障(如不平衡、不对中等)时,应主要考虑振动位移的变化;而在进行振动的总体状态测量时,均应选振动速度作为参考量。
结合理论分析和实际经验证明[15],机械设备振动部件的疲劳运转与振动速度成正比,振动所产生的能量与振动速度的平方成正比,能量传递造成设备磨损和其他缺陷。因此,在振动判断标准中,无论是疲劳损伤还是磨损等设备运行缺陷,以振动速度作为监测标准最为适宜。
4.2 安装测试
本文以应用于合肥地铁3号线的再制造CT006H盾构为背景对振动在线监控系统进行测试分析。盾构设备振动在线监控系统的被测设备和测试点见表1。

表1 盾构监测点分布
由表1可以看出,盾构监测采样点中电流、压力、流量、刀盘转矩和转速等参数可以从盾构的PLC系统中直接调取,设备振动值需要通过安装传感器进行采集。以盾构2#刀盘主驱动电机为例,测试振动在线监控系统的可行性和有效性,如图5所示。将三轴压电式加速度振动传感器安装在刀盘主驱动电机输出端轴承位置,并将其打孔固定于主驱动底座上。
如图5所示,圆圈内标识的器件分别是2#主驱动电机上的数据集中器和数据采集器,振动信号经过振动传感器传输至VM-BOX数据采集器,将分散的振动数据通过RS485接口统一发送至数据集中器,并送至OPC SERVER上位机监控系统,得到2#主驱动电机振动测试窗口,如图6所示。

图5 2#主驱动电机振动传感器布置
2#刀盘主驱动电机的振动值通信波特率为9 600 Hz,且实时显示X、Y、Z3个轴向的振动频率、加速度和速度值,平均每5 min进行一次数据采集,系统将监测到的振动数据存储于数据库的实时数据表中。通过上位机查询历史数据表了解2#主驱动的振动信息,从而对设备安全运行进行有效判断,并做出相应预警。具体历史数据如表2所示。
文献[16]详细规定: 振动频率为10~1 000 Hz的机械设备,以速度作为振动标准,额定功率大于300 kW的刚性电机新投入使用时的振动速度不应超过2.3 mm/s,振动损坏极限速度为7.1 mm/s。在盾构投入使用初期阶段,针对额定功率为315 kW的刀盘2#主驱动电机振动情况进行试验。此时间段振动的径向频率平均值为46.094 Hz、波动范围为-3.2%~36.5%,轴向频率平均值为52.918 Hz、波动范围 为-18.3%~41.7%,表明应考虑振动速度变化量;而径向速度的平均值为1.45 mm/s、波动范围为-8.3%~4.1%,轴向速度平均值为1.532 mm/s、波动范围为-2.7%~5.1%,其瞬时速度均未超过2.3 mm/s,对于新投入使用的再制造盾构符合国标规定的振动范围,表明此段时间内刀盘2#主驱动的振动情况没有异常,设备运行正常。
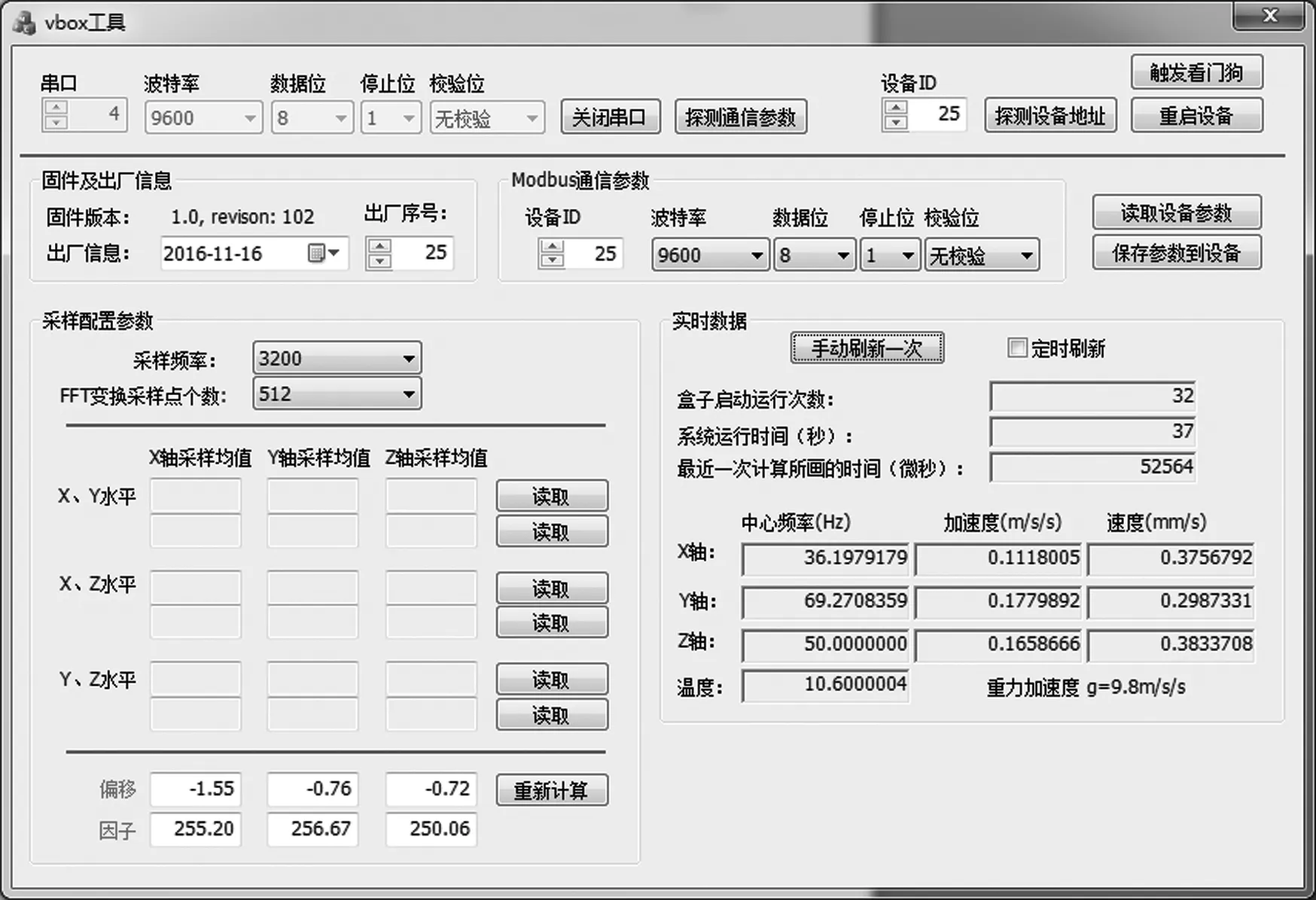
图6 主驱动马达振动测试窗口

序号 时间站名测试量测试值7002017-08-25T22:10:00VM-BOX径向速度/(mm/s)1.487012017-08-25T22:10:00VM-BOX径向加速度/(mm/s2)0.537022017-08-25T22:10:00VM-BOX径向频率/Hz41.417032017-08-25T22:10:00VM-BOX轴向速度/(mm/s)1.567042017-08-25T22:10:00VM-BOX轴向加速度/(mm/s2)0.527052017-08-25T22:10:00VM-BOX轴向频率/Hz44.277062017-08-25T22:15:00VM-BOX径向速度/(mm/s)1.467072017-08-25T22:15:00VM-BOX径向加速度/(mm/s2)0.467082017-08-25T22:15:00VM-BOX径向频率/Hz40.17092017-08-25T22:15:00VM-BOX轴向速度/(mm/s)1.497102017-08-25T22:15:00VM-BOX轴向加速度/(mm/s2)0.627112017-08-25T22:15:00VM-BOX轴向频率/Hz46.887122017-08-25T22:20:00VM-BOX径向速度/(mm/s)1.517132017-08-25T22:20:00VM-BOX径向加速度/(mm/s2)0.527142017-08-25T22:20:00VM-BOX径向频率/Hz40.897152017-08-25T22:20:00VM-BOX轴向速度/(mm/s)1.57162017-08-25T22:20:00VM-BOX轴向加速度/(mm/s2)0.467172017-08-25T22:20:00VM-BOX轴向频率/Hz43.237182017-08-25T22:25:00VM-BOX径向速度/(mm/s)1.477192017-08-25T22:25:00VM-BOX径向加速度/(mm/s2)0.647202017-08-25T22:25:00VM-BOX径向频率/Hz51.567212017-08-25T22:25:00VM-BOX轴向速度/(mm/s)1.57222017-08-25T22:25:00VM-BOX轴向加速度/(mm/s2)0.847232017-08-25T22:25:00VM-BOX轴向频率/Hz75.007242017-08-25T22:30:00VM-BOX径向速度/(mm/s)1.337252017-08-25T22:30:00VM-BOX径向加速度/(mm/s2)0.647262017-08-25T22:30:00VM-BOX径向频率/Hz56.517272017-08-25T22:30:00VM-BOX轴向速度/(mm/s)1.617282017-08-25T22:30:00VM-BOX轴向加速度/(mm/s2)0.667292017-08-25T22:30:00VM-BOX轴向频率/Hz55.21
5 结论与建议
盾构振动在线监控系统可以实现数据在线监测、动态分析、历史查询和异常报警等功能,为设备潜在故障预警提供了重要的数据支持。目前,此套振动监控系统还处于试验阶段,尚未出现故障案例。建议在后续施工过程中设备出现故障时,可对故障前期系统输出的盾构振动数据进行集中分析,并结合现场问题对故障进行诊断,以进一步验证盾构振动在线监控系统的预判故障及报警性能。
[1] 刘宏志. TBM及盾构机设备状态监测与故障诊断实用技术综述[J]. 隧道建设, 2007, 27(6): 86.
LIU Hongzhi. Practical technology for status monitoring and malfunction diagnosis of equipment of TBMs and shield machines [J]. Tunnel Construction, 2007, 27(6): 86.
[2] 姚兴佳, 刘颖明, 刘光德, 等. 大型风电机组振动分析和在线状态监测技术[J]. 沈阳工业大学学报, 2007, 29(6): 627.
YAO Xingjia, LIU Yingming, LIU Guangde, et al. Vibration analysis and online condition monitoring technology for large wind turbine[J]. Journal of Shenyang University of Technology, 2007, 29(6): 627.
[3] 全建成. 关于风力发电机组振动监测系统数据分析和故障预警应用研究[J]. 风能产业, 2016(1): 66.
QUAN Jiancheng. Study of data analysis and failure warning of wind turbine vibration monitoring system [J]. Wind Energy Industry, 2016(1): 66.
[4] 张传健. 振动在线监测系统的研制及其在冷连轧机组的应用[J]. 四川冶金, 2006, 28(2): 44.
ZHANG Chuanjian. The system of condition monitoring and its application in continue cold roll mill [J]. Sichuan Metallurgy, 2006, 28(2): 44.
[5] 冀增华. 配电变压器振动在线监测技术研究[J]. 电气制造, 2015(3): 54.
JI Zenghua. Research on vibration online monitoring of distribution transformer [J]. Electrical Manufacturing, 2015(3): 54.
[6] 张宏辉, 赵天禅, 郑翔, 等. 盾构核心零部件在线故障诊断技术研究[J]. 中国机械, 2015(20): 153.
ZHANG Honghui, ZHAO Tianchan, ZHENG Xiang, et al. Research on online fault diagnosis technology of shield core components [J]. Machine China, 2005(20): 153.
[7] 蒋庆. 地铁盾构设备状态监测与故障诊断研究[D]. 沈阳: 沈阳理工大学, 2010.
JIANG Qing. Condition monitoring and troubleshooting of metro shield equipment[D]. Shenyang: Shenyang Ligong University, 2010.
[8] 李宵宵. 加速度传感器的标定系统与实验研究[D]. 北京: 北京化工大学, 2010.
LI Xiaoxiao. Calibration system and experimental study of acceleration sensor [D]. Beijing: Beijing University of Chemical Technology, 2010.
[9] SUTHERLAND P E. Performance calculation for tunnel boring machine motors[C]//Industry Applications Conference, 2000. [S. l.]: IEEE, 2000(4): 2668.
[10] WICK M R, DUTTA P. Reconstruction facility for today′s export systems [J]. IEEE Export, 1989, 4(1): 26.
[11] YANG Shuhui, DAI Fei, CARDEI M, et al. On connected multiple point coverage in wireless sensor networks [J]. International Journal of Wireless Information Networks, 2006, 13(4): 289.
[12] 郭建章. 盾构机液压系统原位检测技术研究[D]. 石家庄: 石家庄铁道大学, 2015.
GUO Jianzhang. Research on in-situ detection technology of hydraulic system of shield machine [D]. Shijiazhuang: Shijiazhuang Tiedao University, 2015.
[13] 赵炯, 王伟, 郑晟, 等. 盾构关键零部件在线检测与远程诊断技术研究[J]. 制造业自动化, 2010, 32(14): 1.
ZHAO Jiong, WANG Wei, ZHENG Sheng, et al. Study of on-line monitoring and remote diagnosis technique of the key components of shield machine [J]. Manufacturing Automation, 2010, 32(14): 1.
[14] 欧杨. 基于加速度传感器的电机振动测量[D]. 苏州:苏州科技学院, 2016.
OU Yang. Motor vibration measuring based on acceleration sensor [D]. Suzhou: Suzhou University of Science and Technology, 2016.
[15] 李一凡. 直流电机振动监测及故障特征分析[J]. 仪器仪表学报, 2011(6): 114.
LI Yifan. Vibration monitoring and fault characteristics analysis for DC motor [J]. Chinese Journal of Scientific Instrument, 2011(6): 114.
[16] 在非旋转部件上测量和评价机器的机械振动: 第3部分 额定功率大于15 kW额定转速在120 r/min至15 000 r/min之间的在现场测量的工业机器: GB/T 6075.3—2001 [S]. 北京: 中国标准出版社, 2001.
Mechanical vibration: Evaluation of machine vibration by measurements on non-rotation parts: Part 3: Industrial machines with nominal power above 15 kW and nominal speeds between 120 r/min and 15 000 r/min when measured in situ:GB/T 6075.3—2001 [S].Beijing: Standards Press of China, 2001.
