基于电子限位技术的管状电机控制系统探究
2018-03-27高帅杨家武蒋宗祥刘丹丹郭琳姚树伟王博通讯作者张东煜
高帅,杨家武,蒋宗祥,刘丹丹,郭琳,姚树伟,王博,通讯作者:张东煜
(东北林业大学,黑龙江 哈尔滨 150000)
在管状电机的控制系统中,常用于系统限位的方式有机械限位与电子限位。虽然机械限位的可靠性较强,但是体积比较大,很容易出现磨损且限位调整较为繁琐。而电子限位能够弥补机械限位的缺陷,能够用于体积要求较小的控制系统中。因此,对电子限位技术的应用分析很有必要。
1 限位装置安装
在管状电机的控制系统中,常用的限位装置有机械限位与电子限位。首先是机械限位,这种限位装置具备较强的可靠性,但是体积比较大,很容易出现磨损,而且限位调整比较繁琐,不够便捷。这种限位装置常用于机电一体化设备中。在管状电机中应用的机械限位装置主要是通过输出轴带动限位传动轮运转,再通过传动轮实现机械限位的驱动。在机械限位装置中,包括正向螺杆与反向螺杆2种,当限位传动轮进行正向或者反向旋转的时候,这两组螺杆上安装的螺丝会向相反的方向运动。如果到达了管状电机所需的限位位置,螺丝会将安装好的小型限位开关顶开,从而使管状电机正反方向的其中一个电源断开,以此停止管状电机的运行。因为机械限位装置会进行较长的外部运动行程,所以正反向的螺杆需要一定的长度,通常来说,螺杆的长度在15cm左右。然后是电子限位,在管状电机中,电子限位装置主要是将三端霍尔元件安装在减速箱与管状结构的电机中间,并在管状电机的输出轴位置安装与输出轴共同旋转的磁钢安装盘。当管状电机进行旋转时,磁钢会与霍尔原件进行相对运动,使得管状电机的旋转出现脉冲数。通常来说,可以通过将电子限位装置安装在电机的高速区域或者增加磁钢的数量来提升限位精度。因为霍尔元件的安装盘与磁钢安装盘之间的距离在6mm左右,所以电子限位装置所占的体积非常小,能够弥补机械限位装置的不足,需要将其进行推广应用。具体的电子限位装置见图1。
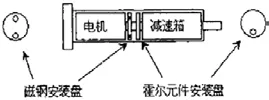
图1 卷帘机电子限位装置示意图
2 必要设备
管状电机主要由交流电动机、减速箱与限位控制器3个部件组成。交流电动机能够在短时间内进行负载工作,充分利用了管状电机的体积效能;减速箱具备体积小、传动范围广、工作效率高以及运动平稳等优点;限位控制器主要分为机械限位装置与电子限位装置2种,传统的管状电机大都采用机械限位装置,但是随着科学技术的发展,电子限位技术在管状电机中的应用越来越广泛。
3 电子限位技术的限位精度分析
管状电机属于垂直起降的设备,内部安装有停车制动装置,但是在上行与下行这两个方向上的惯性转矩会对系统造成一定影响,上行与下行造成的影响有所不同。当上行停止运行后,管状电机本身的重量基本能够将惯性转矩抵消掉;当下行停止运行后,在管状电机本身的重量和惯性转矩的共同作用下,设备将会出现滑动。在管状电机的产品标准中明确指出,其限位精度要求整个行程在4mm以内。根据实际的应用状况与产品标准要求,设计人员在进行软件设计时,可以在每次运行停止时,把计数器的关断时间延长1s。也就是说,等到惯性小时之后,再将本次运行的相关数据记录下来。这种应用方式不仅可以保障设备的限位精度,还能够避免电机瞬时正反转为驱动器件造成较大的电流冲击,延长管状电机控制系统的使用寿命。
4 电子限位技术设计
4.1 电子限位技术应用硬件的设计
首先,主要芯片的选用。本文设计的管状电机控制系统的控制核心为Atmel公司开发的89C2051单片机,并选用X25045芯片,提升控制系统的抗干扰能力与纤维数据存储功能。作为XICOX公司的“看门狗”电路,X25045芯片内置4k位的EEPROM,采用8脚封装方式。与此同时,控制系统中的遥控电路主要将2262/2272作为核心组件,以此设计而成的遥控电路简单便捷,按键和数据位可以很好地对应,还具备较高的可靠性。另外,控制系统的位置检测主要通过霍尔元件C203来实现,交流/直流输出区域主要选用LM1413集成放大芯片或者晶体管放大器,通过驱动小型继电器来实现管状电机的控制。
然后,系统的组成。在管状电机控制系统中,X25045芯片主要通过P3.0~P3.3这4根口线进行控制,以此实现“看门狗”电路的定期访问以及系统数据存储;控制系统的遥控器采用3键控制(包括停止键、正转键以及反转键),这3个按键主要通过P1.5~P1.7这3根口线连接三路放大器实现信号输出,其中,有两路放大器用于继电器的控制,另一路放大器用于蜂鸣器的控制,蜂鸣器主要用于应答遥控器发出的操作信号;控制系统中的霍尔元件C203属于集电极开路,是一种三端器件,主要接入系统的集电极电阻R9。另外,在控制系统中,通过二极管隔离的直流电压主要通过P1.0以及P1.1与89C2051单片机中内部模拟量比较器进行连接;在不同的容量条件下,C3和C4能够在停电时,得到多种时间常数。
4.2 电子限位技术应用软件的设计
首先,系统功能软件的设计,管状电机控制系统的功能软件设计需要注意以下2点:其一,运动距离的限位参数需要具备自学习功能,该系统能够通过长时间按动遥控器上的停止键5s,听到应答声后,进入到系统的自学习子程序。再通过正转键控制管状电机上行1次、通过反转键控制管状电机下行1次,同时采集系统上端限位以及下端限位的相关数据。这里的限位数据指的是霍尔元件输出的脉冲数,采集到的限位数据会被存入到X25045中。其二,当管状电机控制系统正常运行时,正反转会通过控制正转键和反转键实现管状电机的正反转,在判断停止键有没有按下停车的同时,将霍尔元件输出的限位数据与自学习过程中记录的脉冲数进行对比,以此实现限位停车。
然后,因为管状电机的实际安装位置有所不同,其具备的限位参数也存在一定差异。所以管状电机控制系统需要具备限位参数的自学习功能。此外,在停电的过程中,管状电机控制系统需要将实时位置数据进行记录。尤其是在运行过程中出现停电时,当下的限位参数必须要记录下来。本文设计的管状电机控制系统,主要应用89C2051内置的模拟量比较器,通过一个二极管来实现电源电压的隔离;再接入P1.0与P1.1,并在系统软件中,通过定时中断20ms对P3.6进行实时判断;最后通过C3与C4共同组成的放电时间差来记录停电瞬间系统的实时数据。
5 结语
综上所述,电子限位技术在管状电机控制系统中的应用能够实现管状电机的小型化。分析可得,通过对电子限位的应用分析可知,有关人员可以根据窗帘机与卷帘机的惯性转矩进行电子限位结构的设计,并保障控制系统具备自学习功能及数据存储功能,这样才能有效地控制管状电机,提升限位精度,为窗帘机与卷帘机的用户提供更好的产品体验。
[1]朱鹏飞.新型微小压电作动器及其在多通道舵机控件中的应用[D].南京航空航天大学,2016.
[2]朱维璐,安国庆.基于PLC的模糊控制在雷管装管机中的应用[J].爆破器材,2015,44(05):40-44.
[3]齐刚.智能电子门位装置的研究[J].科技创新与生产力,2015,(09):78-80,83.
