基于GPS测量技术的CORS高精度测量系统研究
2018-03-27,
,
(青海省柴达木综合地质矿产勘查院,青海 格尔木 816099)
0 引言
随着国际大地测量技术的飞速发展和应用普及,CORS系统在资源勘察、城市环境保护以及运载丁具导航等多个领域中的作用已越来越不可忽视[1-2]。连续运行参考站系统(CORS)是快速、高精度获取空间数据基础设施建设最重要的构成部分,逐渐成为定位测量领域发展热点之一[3]。连续运行参考站系统能够向用户提供实时和事后的高精度定位服务,能够满足各类应用领域对位置、空间信息实时获取的要求,并且具有覆盖范围广、作业成本低、定位精度高等优点[4]。在CORS系统中测量点的定位精度容易受到测量站卫星分布、电离层干扰以及基准站数据等多方面影响,相比常规测量方法具有测量质量控制不确定性[5]。现行的CORS系统处理软件采用VRS技术,通过无线网络传送特定格式的概略坐标至控制中心,通过用户位置,由计算机自适应选取最优基准站,根据接收的测量信息修正测量站卫星分布、电离层引起的误差,将高精度的差分信号传送至移动站,构建一个虚拟的参考基站,可解决RTK测量作业距离上的问题,但测量工作效率低,且因环境以及地形等外界环境的影响,测量系统基准站信号传输受到极大的影响,系统测量稳定性较差[6]。为此,如何解决野外环境下无线网络的信号盲区、作业环境以及高程错误等系统性问题,实现CORS系统可靠、稳定运行,成为测绘行业亟待解决的主要问题,受到了广泛关注[7]。
针对目前CORS系统测量精度方面的诸多不足,相关专家学者针对其影响方面进行了深入研究,例如CORS测量系统基准站坐标时间序列中的共性误差,文献[8]提出了一种优化方案,通过利用区域叠加滤波法提取CORS测量系统基准站坐标时间序列中的共性误差,计算去除共性误差后CORS测量系统基准站坐标时间序列的周期功率谱图,分析系统测量误差对坐标时间序列的影响,最后采用最大似然法确定估计CORS测量系统测量误差的基准站坐标时间序列噪声模型,并通过相关方案消除电离层折影对测量精度的影响,但该方案测量工作效率低。文献[9]针对CORS测量系统的坐标转换存在的诸多不足,提出一种CORS测量系统设计方法,采用狄洛尼三角形建立CORS测量基准站网络,以实时获取坐标转换参数来得到CORS系统高精度平面坐标,该方法较为简单,但难以克服测量站卫星分布、电离层干扰以及基准站数据等多方面影响,系统响应性较差。文献[10]针对CORS系统测量数据质量问题,进行了相关阐述,通过CORS测量系统卫星精密单点定位获得了载波相位观测量的残差时间序列,对多个测量站获得的多路径误差进行建模,通过设定一定约束关系的格网,计算落入该格网的载波相位观测量验后残差的均值及标准差,作为CORS测量系统载波相位观测量在该方向的多路径误差,对CORS测量系统定位观测量进行质量控制,以该方法为基础的CORS测量系统实时数据质量控制精度较高,但传输测量数据有延迟。
针对上述问题,本文结合相关先验知识,介绍GPS测量技术在CORS测量系统中的应用,并对其测量精度进行深入分析,实验结果表明,采用该测量系统完全可以符合相关规范要求,可在无人值守的情况下稳定运行,并有效提升工作效率。
1 基于GPS测量技术的CORS高精度测量系统
1.1 CORS高精度测量系统软硬件原型构架
CORS高精度测量系统采用GPS测量技术,依据实际应用需求组建连续运行参考站,采用计算机、数据通信技术将参考站与CORS系统测量数据中心构成网络,CORS高精度测量系统由测量数据中心、基准站系统、数据通讯系统和用户系统4个部分构成,各个子系统由数据通信系统互联,构成一个分布控制区域的局域网。CORS高精度测量系统框架如图1。

图1 CORS高精度测量系统建设结构图
1.2 组成CORS高精度测量系统的硬件环境
CORS高精度测量系统有基准站子系统、控制中心子系统、数据通讯子系统、用户应用子系统4部分构成,下面分别对各个子系统做下简单的介绍。
1.2.1 CORS高精度测量基准站子系统
基准站主要多个均匀分布的CORS参考站构成,主要负责GPS卫星观测数据的采集和将采集的测量数据传输至数据中心或是测量数据传播中心,各个基准站配置后备电源,可在意外断电情况下,依据后备电源维持测量数据采集以及传输工作,各个基准站与数据中心对接,通过数据中心对其进行监控管理,对接过程利用公共网络实现对向传输,通过定时自动对设备进行检测,具备CORS系统检测功能,可在整个数据对接过程出现问题时及时报警,CORS测量系统的基准站服务器以及管理软件采用Eagle,数据传输与采集选用Base Trans软件,具体建设结构如图2所示。

图2 CORS高精度测量系统建设结构图
在CORS高精度测量基准站建设过程中,如果测量设备遭受雷电击中将会影响CORS测量系统中控制中心、数据通讯接收端等相关设备的使用寿命,为了减少被雷电击中的概率,在合适区域安装了相应的避雷针,CORS测量系统基准站的建设要求要满足关于国土资源管理所涉及到的各类测量定界,卫星接收选用美国全球卫星定位系统GPS,同时基准站设置在给定区域露天制高点。
1.2.2 CORS高精度测量控制中心子系统
控制中心是CORS测量系统各个子系统的服务中心,是CORS测量系统的保障,主要负责对各个基准站的GPS观测数据进行接收、处理、发布和存储,控制中心选用Trimble的GPS Tream和GpsNet软件利用服务器、磁盘阵列实现观测数据存储,分析观测数据质量,对其参建单位通过网络传输专线和数据中心相连,实现数据传输接收,并设定存储设备采集TJCORS基准站的原始观测数据,对采集的观测数据进行统一解算,实时估计出CORS测量系统残差,对其进行修正,将修正后的测量数据依据数据播发中心传输给用户,用图3进行描述。
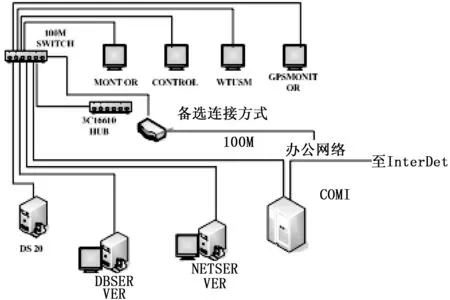
图3 CORS高精度测量控制中心子系统
1.2.3 CORS高精度测量数据通讯子系统
测量数据通讯子系统由各个基准站数据的传输以及GPS网络数据发布两部分构成,一部分选用E1-PRI数字中继线路,可实现多路用户实时接入;另一部分按照GPS网络形式向注册用户传递测量和数据,基准站与测量数据处理中心之间选用SHD网络,通过注册用户可以采用数据转播中心以及用户端进行双向通讯,通讯选用GSM,GPRS,CDMA等形式,获得GPS网络数据。在测量数据转播中心设定无线中继站,可采用此链路实现RDS的测量数据转播,并配置UHF/VHF设备,可以进行CORS高精度测量系统基准站差分数的转播,如图4所示。
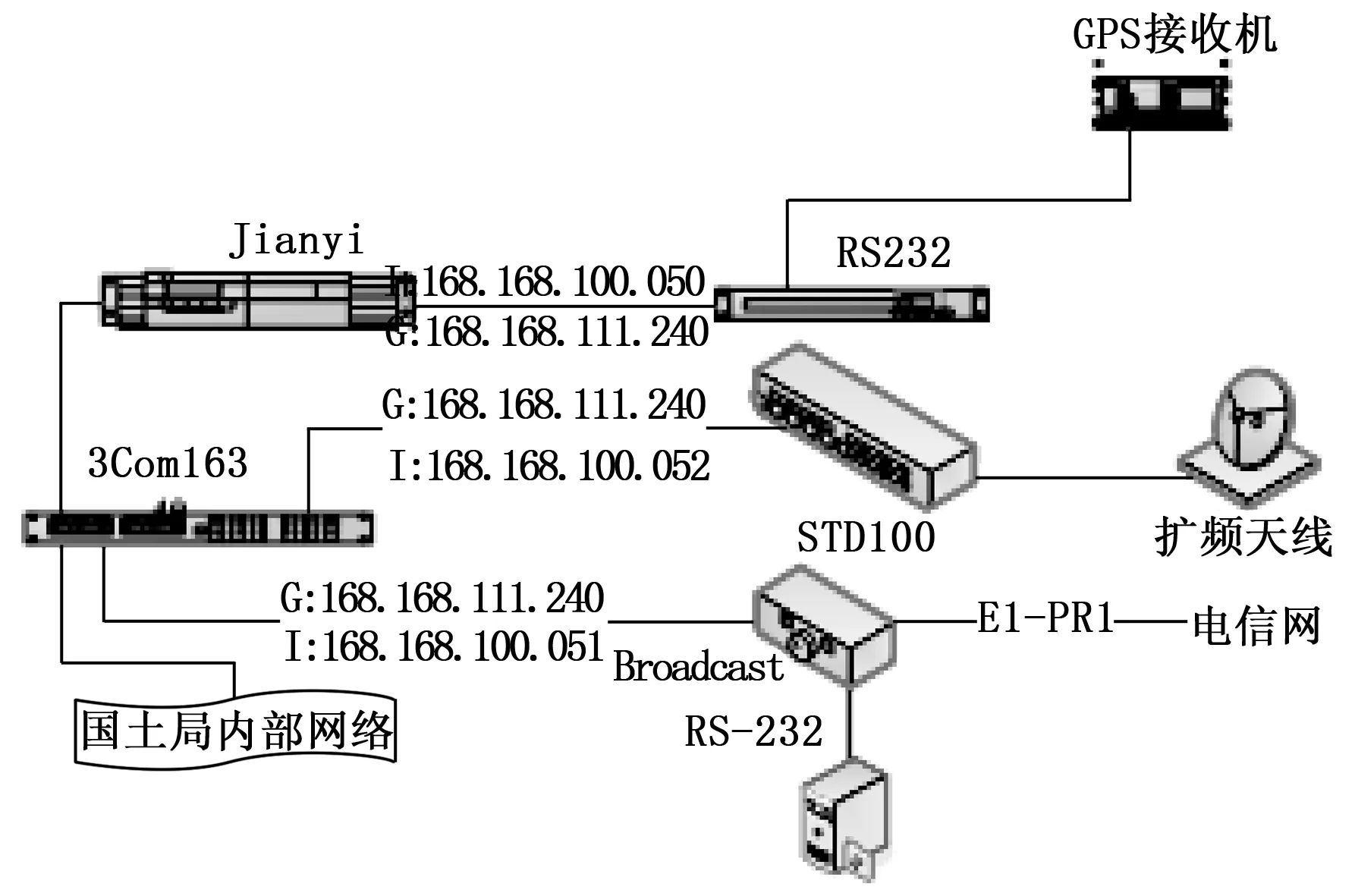
图4 CORS高精度测量控制中心子系统
1.2.4 CORS高精度测量用户应用子系统
用户通过GPS接收机接收卫星测量数据,并与基准站以及数据播发中心进行数据对接,通过CORS高精度测量系统的事后数据可达到毫米级定位精度,目前CORS高精度测量系统最主要服务目标为测绘类用户和导航类用户,CORS高精度测量用户应用子系统考虑了符合上述用户需求的多种GPS接收机的兼容性,选用已通过测试的Trimble和Javad双频GPS接收机,与数据通讯子系统间的通信链路通过GSM数据通信,CORS高精度测量系统用户单元结构图见图5。

图5 CORS高精度测量用户应用子系统
2 CORS高精度测量系统软件环境
考虑到对相关专业软件的兼容性,实现CORS高精度测量系统实时定位的前提条件基准站的参数测量,软件部分对此进行深入研究。
首先需要准确固定基准站的整周模糊度,在确定该值后计算测量区域误差改正数,理论上分析载波相位的模糊度为整数,然而在CORS高精度测量系统基准站间距离较长的情况下,CORS高精度测量系统基准站之间的双差电离层延迟、对流层延迟等综合误差的影响随着基准站间的距离的增大而逐渐增大,可采用GPS载波相位观测值和P码伪距综合的组合观测值计算基准站间双差宽巷整周模糊度,利用公式(1)计算CORS高精度测量系统基准站间宽巷模糊度的初值:

(1)

结合上述硬件描述的基准站的建设要求,选用较好的天线,可在一定程度上减少相位多路径效应,采用CORS基准站多路径效应的周期性减少多路径的影响,利用下式给出CORS基准站A、B对GPS卫星p、q的双差载波相位观测方程:

(2)

(3)

CORS基准站的载波相位整周模糊度确定后,采用最小二乘法对位置参数以及卫星整周模糊度参数进行估计,将其带入原始CORS基准站载波相位观测方程,对其进行最小二乘解算,求出CORS流动站的初始位置,基准站载波相位观测方程写成误差方程组的形式,利用下式表示矩阵形式:
(4)
式中,δX代表CORS基准站载波相位观测值与几何距离以及综合误差修正数之差向量,N1代表L1载波相位整数模糊度向量。
在获得CORS流动站L1整周模糊度的误差方程后,对公式(4)进行最小二乘解算,获得L1相位模糊度的浮点解以及协方差阵。假设基准站浮点解精度较高则可采用直接取整确定基准站载波相位的整周模糊度,为了确保基准站模糊度的固定成功率,也可采用基准站双差L1载波相位模糊度的浮点解以及协方差矩阵,通过LAMBDA方法对模糊度进行搜索固定。
3 实验及结果分析
3.1 实验步骤
为了更好的说明本文提出的基于GPS测量技术的CORS高精度测量系统的综合有效性,本系统选用Microsoft Visual Studio rc 2017作为开发平台,基于NET Framework2.0构建,可提供效率极高的、基于标准的多语言环境,结合一个在农村进行地籍测量的实际例子进行分析。具体实验步骤如下:
1)利用本文方法设计的CORS系统得出测量点区域分布图;
2)选用联测45个E级GPS点数据作为参考系数,由此确定CORS观测数据的精确性,近似的认定E级点坐标为真实值,计算本文所设计的CORS系统检测坐标与真实值的较差;
3)采用本文所设计的CORS测量系统和常规的RTK测量方式,采集测绘图根点和测量区域控制点的平面坐标,将架设的基准站作为坐标原点,通过距离的远近对比CORS测量系统与常规RTK测量误差值的大小;
4)对比两种测量方式下的周跳比。
3.2 实验结果分析
首先采集覆盖整个测量工程全线范围控制点的WGS-84坐标,与采集点的已知坐标进行参数拟合,由于整个测量区域村庄分布不齐,因此将控制点划分为5个部分,最后通过10个人耗时一天完成该区域的测量任务,而采用本文方法设计的CORS系统后,仅需3个工人在4个小时内就完成了测量任务,测量区域面积约50 km2,测量点区域分布如图6所示。

图6 测量点位置分布图
由于测量的范围较大,因此采用传统的测量技术会使整个测量工作时间紧张,测量工作难以即时完成,正因上述传统测量技术存在的原因,所以本文所设计的CORS测量系统的优越性在地籍测量过程中显现出来,各个观测点由于观测条件以及测量地形的不同,因此要由若干单次观测构成一个测回,在实际CORS系统中,各个测量站可在5分钟之内即可完成观测任务。选用联测45个E级GPS点数据作为参考系数,由此确定CORS观测数据的精确性,近似的认定E级点坐标为真实值,计算本文所设计的CORS系统检测坐标与真实值的较差,如表1所示。

表1 检测点精度统计表
分析表1可知,采用本文设计的CORS测量系统的较差值均在1:1 000比例尺地籍地形测绘图中,对测量区域各个测绘图根点所处的位置的高程以及平面点位的定位精度均在要求的范围内,说明本文设计的CORS系统测量的地籍图图根点的精度分布较为合理均匀、准确无误。其中平面点位中的误差为:
(5)
式中,ΔS代表平面点位区域大小,n代表平面点数量。高程点位中误差为:
(6)
式中,ΔH代表高程点位区域大小,采用常规的RTK技术对该区域进行测量,架设基准站,能够观测约5 km范围,在网络信号良好的情况下,完成整个测量过程需要耗时9~10个小时。如果选取本文所设计的CORS测量系统对该区域进行测量,不受网络通信范围的限制,节省了多次架设基准站和测量区域控制点拟合所需的时间,完成该区域测量工作,仅需4~5个小时即可。
采用本文所设计的CORS测量系统和常规的RTK测量误差值的大小分析结果用图7进行表示。
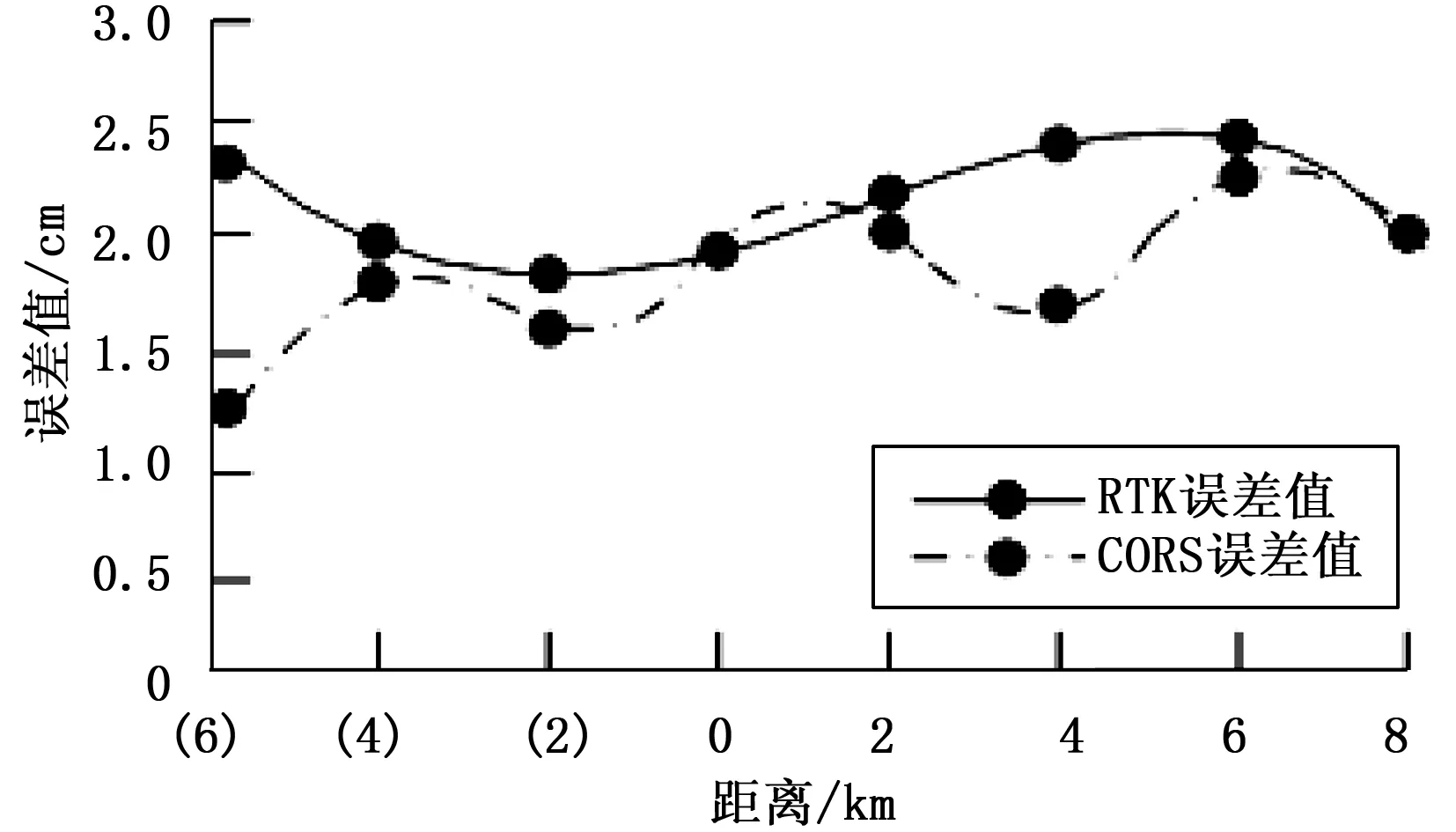
图7 CORS测量系统与常规RTK测量误差对比图
分析图7可知,采用常规的RTK测量误差随着流动站与基准站之间的距离不断的变大,累计的测量误差也会逐渐增加,但是本文所设计的CORS测量系统误差不会随着距离的增加而增加累计误差,证明本文设计系统的测量精度较优。
采用本文所设计的CORS测量系统和常规的RTK测量方式,对比两种测量方式的周跳比(%),周跳比是GPS跟踪站总观测值数量和周跳比个数之比,描述的是测量数据中含有周跳的情况,利用下式进行计算:
(7)
式中,O/Slips描述的是观测值与周跳的比值,周跳值越小对应到周跳比越大,因此该值越大说明测量方式越好,两种测量方式下的周跳比对比结果用图8进行表示。

图8 CORS测量系统与常规RTK周跳比对比图
分析图8可知,本文设计的CORS测量系统对应的周跳比要高于常规RTK技术对应的周跳比,说明本文提出的基于GPS测量技术的CORS测量系统观测数据质量较优,原因在于本文所设计的测量控制中心子系统通过Trimble的GPS Tream和GpsNet软件利用服务器、磁盘阵列实现观测数据存储,在存储之前对采集的观测数据进行统一解算,实时估计出CORS测量系统残差,对其进行修正,将修正后的测量数据依据数据播发中心传输给用户,使得接收机的周跳比相比常规RTL技术较高,保障了测量数据的质量。
4 结束语
随着科技的不断进步,人们对测量精度的要求不断提高,采用传统的测量方法难以保证所测数据的精确性和类型,并且在测量过程中费时费力,测量效率较低,难以保证测量工作者和管理用户实时了解测量区域的变化信息,而基于GPS测量技术的CORS高精度测量系统从根本上改进了传统测量方法的测量模式,测量过程中仅仅需要多建立参考站,为用户实时提供测量信息,保证用户接收测量数据的精准度,在测量过程中仅仅需要对各个小区域停留几秒,即可完成对测量区域坐标的测量,节省了大量测量时间,具有广阔应用前景。
[1]王 锦,刘 鹏,尹 川,等.机载北斗/GPS/SINS组合导航系统软硬件设计[J].计算机测量与控制,2016,24(3):267-269.
[2]吕伟才,高井祥,杭玉付,等.提高CORS RTK测量精度的卡尔曼滤波算法[J].煤矿开采,2016,21(2):90-94.
[3]潘宇婷,陈宇晨,王承宇,等.基于GPS授时的电网频率测量技术的研究[J].电源技术,2016,40(3):709-710.
[4]周博海,郑建生,陈鲤文,等.GPS接收机在高动态下的抗干扰技术实现[J].科学技术与工程,2015,15(21):136-141.
[5]张小鸣,王燕萍.相位式激光测距系统优化设计及仿真[J].计算机仿真,2016,33(2):41-46.
[6]孙 媛.大数据网络协作传输优化编码方法[J].科技通报,2017,33(3):104-107.
[7]战 杰,孙贵新.双频GPS载波相位相对定位精度分析与评估[J].电子设计工程,2016,24(16):70-72.
[8]石 颖,王卫星,陆健强,等.基于CORS技术的农业机械差分定位系统设计[J].农机化研究,2017,39(6):120-123.
[9]陈忠伟,陈西斌,邱 川,等.基于JSCORS的矿区变形监测基准站选取研究[J].工矿自动化,2015,41(9):44-48.
[10]王 琰,张传定,胡小工,等.一种地面连续运行参考站实时质量控制算法[J].仪器仪表学报,2016,37(11):2506-2513.
