疲劳驾驶多源性智能监测预警方法研究
2018-03-27
(西安交通大学 机械工程学院, 西安 710049)
0 引言
疲劳驾驶是指汽车驾驶员在长期连续驾驶汽车后,心理机能和生理机能都产生了失调,导致驾驶员在驾驶反应和技能上出现下降的状况[1]。疲劳驾驶的产生是因为驾驶员长时间驾驶汽车或驾驶员的睡眠不足[2]。当驾驶员疲劳驾驶汽车时会使驾驶员在注意力、感觉、意志和思维等方面出现下降的现象,甚至会出现驾驶动作过早或延误、操作时间不当、出现记忆瞬间消失及精神恍惚等不安全的因素,很容易发生交通事故[3-4]。我国交通部门对“疲劳驾驶经历”进行问卷调查,发现有70%的驾驶员在开车时出现打瞌睡的情况,有90%的驾驶员睡眠时间都在8小时以下,50%的驾驶员睡眠时间在7小时以下[5]。根据调查发现我国每年有一多半的交通事故是因为疲劳驾驶造成的,并因疲劳驾驶造成交通事故的经济损失高达数千亿,同时造成了大量的人员伤亡[6]。目前国内的疲劳驾驶监测预警方法存在获取规律难、监测预警方法得不到统一评价标准、监测灵敏度低、可靠性差的问题[7]。为此,提出一种疲劳驾驶多元性智能监测预警方法。
疲劳驾驶监测预警是避免因睡眠不足和长时间疲劳驾驶而造成交通事故的主要方法。为了使疲劳驾驶监测预警方法更好的应用到行车驾驶中,需要对疲劳驾驶监测预警方法进行深入的分析和研究。文献[8]提出了一种基于机器视觉的疲劳驾驶监测预警方法,该方法通过缩小监测预警拟合点的取值范围,减少监测预警拟合点所用的时间,根据人眼前后移动和大小的不同提取人眼的轮廓特征参数。采用归一化的方法减少人眼特征提取的误差,通过连续帧分析的方法对驾驶员的疲劳状态进行判定,该方法的实时性较高,但监测预警的结果误差较大。文献[9]提出了一种基于人眼状态信息的非接触式疲劳驾驶监测预警方法,该方法以人眼的图像信息为标准,建立一个单位时间内驾驶员非正常状态时间所占百分比的疲劳驾驶监测预警判断模型。通过红外光源对驾驶员的眼睛进行主动照明,金属半导体摄像头对驾驶员人眼的图像信息进行采集,采用Adaboost算法对人眼进行准确定位,并利用Harris强角点监测驾驶员人眼的中心,采集驾驶员视线内的信息,判断驾驶员的疲劳状态,该方法的抗干扰性强,但监测预警所用时间较长。文献[10]提出了一种多算法融合的疲劳驾驶监测预警方法,该方法通过Otsu算法识别驾驶员眼睛中的图像信息,采用动态滑动窗口算法计算驾驶员眨眼的阈值,并通过PERCLOS算法对驾驶员的疲劳状态进行估算,根据驾驶环境的变化采用摄像头收集驾驶员眼中的图像信息,判断驾驶员的不同疲劳状态,该方法可以快速的分辨驾驶员的疲劳状态,但成本较高。根据传统方法存在监测预警结果误差高、监测所用时间长、成本高等问题,提出了一种疲劳驾驶多源性智能监测预警方法。
1 基于智能移动终端的汽车疲劳驾驶监测预警方法
在汽车的正常行驶中,首先通过计算固定在驾驶员右上方的智能移动终端加速传感器X、Y、Z三个方向在水平面上的加速度,得到3个方向的加速度和,进而算出驾驶员水平方向驾驶汽车的加速度,对驾驶员的疲劳驾驶状态进行判定。
开始监测时汽车停在水平的道路上并处于静止状态,此时汽车水平方向的加速度为0,智能移动终端的加速传感器X、Y、Z三个方向在水平面上的加速度和为0,智能移动终端的加速传感器中X轴在水平面上的投影方向为Y轴,水平面垂直Y轴的方向为X轴,如图1所示。

图1 水平方向投影示意图
智能移动终端的加速传感器X、Y、Z三个方向是两两相互垂直的,在计算时取X、Y、Z的绝对值,其中地球的重力方向是竖直向下的,加速度取值为9.8 m/s2,智能移动终端加速传感器X、Y、Z三个方向与水平地面的夹角分别是α、β、γ,3个夹角的正弦值分别为x/9.8、y/9.8、z/9.8,在水平方向加速度的计算公式如下:
(1)
(2)
(3)
智能移动终端加速传感器水平方向的3个方向初始加速度和为0 m/s2,进行智能监测分析后,可得出下列等式:
a=bsinθ1+csinθ2
(4)
(5)
在驾驶员实际驾驶汽车时,智能移动终端的θ1和θ2都是小于90度的,此时智能移动终端的加速度正弦值取比0大的一组,计算公式为:
(6)
(7)
将公式(1)、(2)、(3)带入公式(6)、(7)中可以得到驾驶员水平方向驾驶汽车的加速度,计算公式如下:
(8)
在基于智能移动终端的汽车疲劳驾驶监测预警方法中,地球的重力加速度的取值定为9.8 m/s2,并且地球的水平面与汽车的水平面会存在一定角度,这些因素不可避免,所以基于智能移动终端的汽车疲劳驾驶监测预警方法不可避免的存在一定误差。
2 疲劳驾驶多源性智能监测预警方法
2.1 驾驶员图像预处理
使用疲劳驾驶多源性智能监测预警方法对驾驶员眼睛中的图像信息进行跟踪和定位之前,应该先对摄像头采集的图像进行原始图像预处理,驾驶员图像预处理是通过采集驾驶员图像中的像素灰度分布密度函数进行图像灰度的变换,计算采集的驾驶员图像信息灰度值,得到驾驶员图像中像素灰度分布范围和密度,为后续的监测和预警工作做准备。
采集的驾驶员图像中包含了大量的信息,通过计算驾驶员图像信息的灰度值,得到一个函数,计算公式如下:
(9)
式中:k=0,1,2,…,L-1,rk代表的是驾驶员图像k级的灰度值,nk表示的是存在灰度值rk图像的数量,n所表示的是驾驶员图像中的像素总和,L代表的是驾驶员图像中的总灰度级别。Pr(rk)体现了rk在驾驶员图像中出现的概率,通过计算Pr(rk)可以得到驾驶员图像中灰度分布的准确范围。通过改变驾驶员图像的原始像素分布状态,使像素灰度均匀的分散在驾驶员图像的灰度范围空间内,增强了驾驶员图像的显示效果。
对驾驶员图像进行预处理时,在像素分布密度大的地方进行扩大,增强驾驶员图像的对比度;在像素分布密度较小的部分进行压缩,减小驾驶员图像的对比度,驾驶员像素分布密度变化计算公式如下:
(10)
经过监测预警方法的图像预处理后,驾驶员图像中像素的分布密度较为均衡、平坦,驾驶员图像变得更加明亮、清晰,提高了驾驶员图像的整体显示效果,采集的驾驶员图像使用价值变高。
课文大多语言文字富有特色,是学生习作的好范文。怎样引导学生体会文本的语言特色呢?我们运用“段落大PK”的方法进行对比阅读。
2.2 疲劳驾驶图像多源性特征跟踪监测预警
对驾驶员图像进行预处理后,采用卡尔曼滤波算法对驾驶员的图像信息进行跟踪,得到驾驶员各个时间内的状态估计值,最后,通过计算驾驶员状态估计值判断驾驶员是否存在疲劳状态。卡尔曼滤波算法对驾驶员行驶过程中的面部特征、车辆状态、眼部特征、方向盘特征和嘴部特征方面对疲劳驾驶的监测和预警进行分析,以驾驶员图像的嘴部图像为例:采集第t个驾驶员图像,对驾驶员图像进行预处理得到驾驶员嘴部区域,每个采集的驾驶员图像嘴部状态都可以用速度和位置进行表示。设(xt,yt)代表驾驶员图像的嘴部区域的中心点在第t个图像中的像素位置,(ux,vy)代表的是驾驶员图像嘴部区域的中心点在第t个图像中的方向和速度,驾驶员图像嘴部区域的状态向量用Xt表示。
Xt=(xt,yt,ux,vy)T
(11)
在疲劳驾驶多源性智能监测预警方法中,第t+1个驾驶员图像嘴部区域的状态向量为Xt+1,计算公式如下:
Xt+1=AtXt+Wt
(12)
式中:At所代表的是驾驶员图像嘴部区域状态的转移矩阵,Wt代表的是驾驶员图像嘴部区域状态的噪声。设两个相邻的驾驶员图像中嘴部区域的状态变化不大,计算驾驶员图像间的运动恒定,驾驶员嘴部区域的状态转移矩阵如下:
(13)
设疲劳驾驶多源性智能监测预警方法中驾驶员图像的观测向量为Zt,表示在第t个驾驶员图像中嘴部区域的估计值。
Zt=(xt,yt)
(14)
Zt=HtXt+Vt
(15)
式中:Ht表示的是疲劳驾驶多源性智能监测预警方法中驾驶员图像测量和状态的转移矩阵,Vt所代表的是驾驶员图像中的测量噪声。Ht的表达公式如下:
(16)

3 实验结果分析
3.1 实验步骤
1)分别采用本文方法和基于Android平台的疲劳驾驶监测预警方法进行丢包率测试。
2)分别采用本文方法和文献[9]方法、文献[10]方法进行疲劳驾驶多源性智能监测预警方法的性能测试,对比两种不同方法的多源性。
3)采用本文方法和文献[8]方法进行疲劳驾驶监测预警方法的抗干扰性测试。
4)通过参数rk对疲劳驾驶多源性智能监测预警方法的灰度值计算效率进行测试。
3.2 实验结果分析
本次实验在重庆市机场高速路段完成,测试时机动车以80千米/小时的速度在重庆机场高速路段上进行折返行驶,进行实验时天气状况为中雨。图2为疲劳驾驶多源性智能监测预警方法采集驾驶员图像信息。
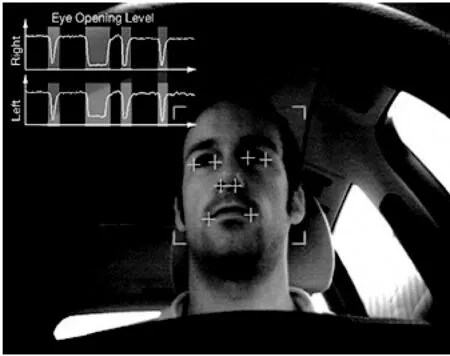
图2 驾驶员图像信息
分别采用本文方法和基于Android平台的疲劳驾驶监测预警方法进行测试,对比两种方法的丢包率(%),丢包率指的是在进行监测预警实验时丢失的数据包数量占发送总数据包的比率,对比结果如表1所示。
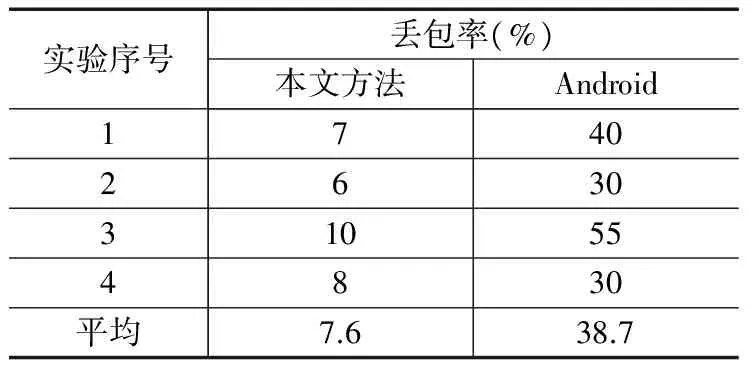
表1 两种不同方法的丢包率对比
分析表1可知,本文方法的平均丢包率为7.6%,基于Android平台的疲劳驾驶监测预警方法的平均丢包率为38.7%,通过对比可知本文方法的平均丢包率比基于Android平台的疲劳驾驶监测预警方法的平均丢包率低。基于Android平台的疲劳驾驶监测预警方法将采集驾驶员图像信息的摄像头安置在机动车方向盘中心的后方,每隔2秒对机动车驾驶过程中方向盘的转角速度和加速度进行计算并储存,然后每隔12秒从数据库中提取图像信息作为疲劳驾驶级别的判定指标,通过计数模型判断疲劳驾驶的级别,对不同级别的疲劳驾驶采取不同程度的预警措施。基于Android平台的疲劳驾驶监测预警方法收集驾驶员图像信息和处理信息的过程较为复杂、所用时间长,数据在传输过程中容易丢失,该方法的丢包率较高。
分别采用本文方法和文献[9]方法、文献[10]方法进行疲劳驾驶多源性智能监测预警方法的性能测试,对比3种不同方法的多源性,对比结果如表2所示。
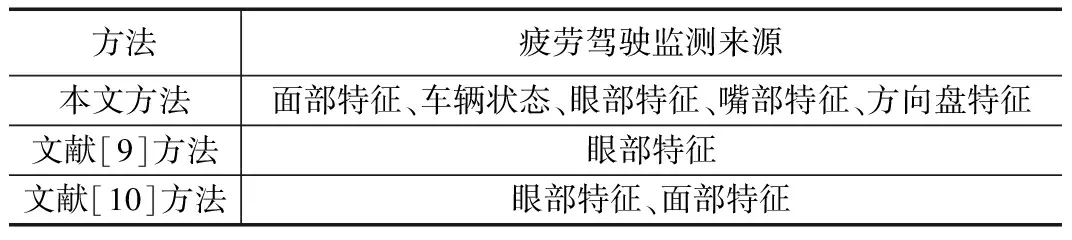
表2 3种不同方法的多源性对比p
分析表2可知,本文方法的疲劳驾驶监测来源有面部特征、车辆状态、眼部特征、嘴部特征、方向盘特征。文献[9]方法建立驾驶疲劳监测预警判断模型,以人眼的图像信息为标准,主要通过红外光源对驾驶员的眼睛进行主动照明,采用Adaboost算法对驾驶员眼部的图像信息进行准确定位,并利用Harris角点检测算法监测驾驶员眼部的图像视觉中心,获得驾驶员视线内的信息,由此判断驾驶员的疲劳状态,可见采用该方法进行疲劳驾驶监测预警过程中,监测的主要目标仅有眼部特征,对于驾驶者以及车况的监测所选目标较少,文献[10]方法通过Otsu算法识别驾驶员眼中的图像信息,采用动态滑动窗口算法得到驾驶员眨眼的阈值,并通过PERCLOS算法对驾驶员的疲劳状态进行估算,根据驾驶环境的变化采用摄像头收集人眼中的图像,以此判断驾驶员的不同疲劳状态。该方法对于驾驶员疲劳驾驶的判定依据主要是眼部特征和面部特征,当实际行驶环境为大雾或是雨天时,仅通过上述两种特征对驾驶者存在的疲劳驾驶状态进行判定,对于后续进行监测预警得出的结果存在一定程度上的误差。对比可知本文方法的疲劳驾驶监测来源要远远多于文献[9]方法和文献[10]方法,本文方法针对于疲劳驾驶监测预警相应的参考来源范围较广,具有智能多源性特点。
分别采用本文方法和文献[8]方法进行疲劳驾驶多源性智能监测预警方法的性能测试,在两种方法正常工作时加入干扰信号,对比两种方法的抗干扰性(%),对比结果如图3所示。

图3 两种不同方法的抗干扰性对比
分析图3可知,图3(a)表示的本文方法正常运行时的数据传输信号,图3(b)表示的是加入干扰信号的本文方法数据传输信号,对比图3(a)和(b)可知,本文方法在加入干扰信号前后的数据传输信号没有太大波动。图3(c)表示的是文献[8]方法正常运行时的数据传输信号,图3(d)表示的是文献[8]方法加入干扰信号后的数据传输信号。分析图3(c)和(d)可知,文献[8]方法在加入干扰信号后的数据传输信号波动较大,因为文献[8]方法通过缩小监测预警拟合点的取值范围,减少监测预警拟合点所用的时间,根据人眼前后移动和大小的不同提取人眼的轮廓特征参数。采用归一化的方法减少人眼特征提取的误差,通过连续帧分析的方法对驾驶员的疲劳状态进行判定,该方法的抗干扰性较低。
表3是疲劳驾驶多源性智能监测预警方法中参数rk对计算驾驶员图像灰度值效率的影响,当此参数控制在1.5~1.6区间时,疲劳驾驶多源性智能监测预警方法计算图像灰度值的效率最高,像素灰度均匀的分散在驾驶员图像的灰度范围空间内,增强了驾驶员图像的显示效果。

表3 参数rk对监测预警方法计算灰度值的效率影响
通过表3可知,疲劳驾驶多源性智能监测预警方法中参数rk对灰度值计算效率有着深度影响,当参数在1.5~1.6区间内疲劳驾驶多源性智能监测预警方法的灰度值计算效率明显高于其他区间内参数的灰度值计算效率,当参数在1.5~1.6区间时,疲劳驾驶多源性智能监测预警方法的灰度值计算效率在96.57%~98.76%之间,进一步证明了本文所提的疲劳驾驶多源性智能监测预警方法的可实现性。
4 结论
疲劳驾驶多源性智能监测预警方法是避免因疲劳驾驶产生的交通事故,减少人员伤亡和经济损失的主要方法,传统的疲劳驾驶监测预警方法存在误差高、监测时间长、成本高等问题,本文方法在解决以上问题的基础上,对疲劳驾驶监测预警方法的丢包率、多源性、抗干扰性和计算效率进行改进和提升,为驾驶员安全驾驶提供了保障。
[1]曹国震, 彭 寒, 谭 伟. 基于FPGA的疲劳驾驶检测算法研究与设计[J]. 电子设计工程, 2016, 24(12):165-167.
[2]宫法明. 交通驾驶员脸疲劳驾驶行为优化图像识别[J]. 计算机仿真, 2015, 32(11):199-202.
[3]陈永高, 单豪良. 基于BIM与物联网的地下工程施工安全风险预警与实时控制研究[J]. 科技通报, 2016, 32(7):94-98.
[4]陈晓静, 戚春华, 朱守林,等. 基于表面肌电的草原公路驾驶员局部肌肉疲劳试验研究[J]. 科学技术与工程, 2015, 15(4):278-282.
[5]陈 军, 陆娇蓝, 刘 尧,等. 基于云计算的多特征疲劳驾驶检测系统研究与设计[J]. 计算机测量与控制, 2015, 23(10):3341-3343.
[6]付 锐, 程文冬, 张名芳,等. 基于动态匹配模型的驾驶人嘴部行为识别与分级预警[J]. 汽车工程, 2015, 37(9):1095-1102.
[7]王冬梅, 冯 偲, 王海鹏,等. 疲劳驾驶检测中基于稀疏表示的眼睛状态识别研究[J]. 影像科学与光化学, 2016, 34(1):95-101.
[8]何 鹏, 刘高凯, 李静辉. 基于机器视觉的疲劳驾驶监测预警系统[J]. 广西师范大学学报(自然科学版), 2015, 33(4):25-29.
[9]李建平, 牛燕雄, 杨 露,等. 基于人眼状态信息的非接触式疲劳驾驶监测与预警系统[J]. 激光与光电子学进展, 2015, 52(4):83-88.
[10]陈东伟, 张 喆, 韩 娜,等. 多算法融合的疲劳驾驶监测算法设计与实现[J]. 太原理工大学学报, 2016, 47(4):518-522.
