完全双余度线传转向机及其余度管理
2018-03-27蔡智凯米峻男王通陈曦连小珉
蔡智凯 米峻男 王通 陈曦 连小珉
(清华大学 汽车安全与节能重点实验室,北京 100084)
1 前言
普通的线传转向系统由于取消了转向盘与转向机之间的机械连接,其安全性存在较大隐患[1]。此外,法规对汽车电子系统的安全性要求越来越高,汽车电子电气系统功能安全标准ISO26262[2]中要求汽车上达到ASILD的重要电子电气系统的故障率低于10-8。线传转向机作为转向执行器,涉及到驾驶员和乘员的生命安全,需要达到这一等级,采用余度的方式是综合成本和技术手段的一种较优方案。
线传转向机是线传转向系统的转向执行机构,其接收线传方向机的转向盘转角信号,并通过电机驱动执行转向操作。完全双余度线传转向机的电子部件均采用了双余度方案,在正常工作模式下采用热备份的双通道电机驱动模式,并能在单通道故障的情况下通过余度管理有效检测到并隔离故障通道,从而保证转向的正常进行,提高线传转向系统的安全可靠性。
余度这一概念源自飞机,飞机上关于双余度舵机的研究及余度管理方法[3-4]已较为成熟。余度的方式能在尽可能节省成本的同时大幅提高线控系统的安全性,具有较好的发展前景。目前,采用双电机方案控制的线传转向机[5-6]已经有了初步的研究,基于该方案的线传转向机的冗余容错方法[7-10]也得到了较多的应用。但是,目前的研究多集中在以局部冗余的方式构建线传转向机,其对故障的容错能力有限。
本文构建了一种完全双余度线传转向机的机电结构,在此基础上提出了相应的余度管理方法,并进行了仿真模型的搭建与仿真,验证了提出的完全双余度线传转向机架构及仿真模型的合理性,以及相应的余度管理方法的可靠性。
2 完全双余度线传转向机的结构与工作原理
完全双余度线传转向机主要由其机电结构与余度管理器组成。其机电结构为转向的主要执行机构,安装在汽车转向器的齿轮齿条上,以驱动转向的进行;余度管理器控制转向机的机电结构进行转向,同时对转向机进行余度管理,以保证线传转向的正常进行。
2.1 机电结构
完全双余度线传转向机的机电结构由双电机并联耦合机构、蜗轮蜗杆减速机构和转角传感器总成组成,如图1所示。
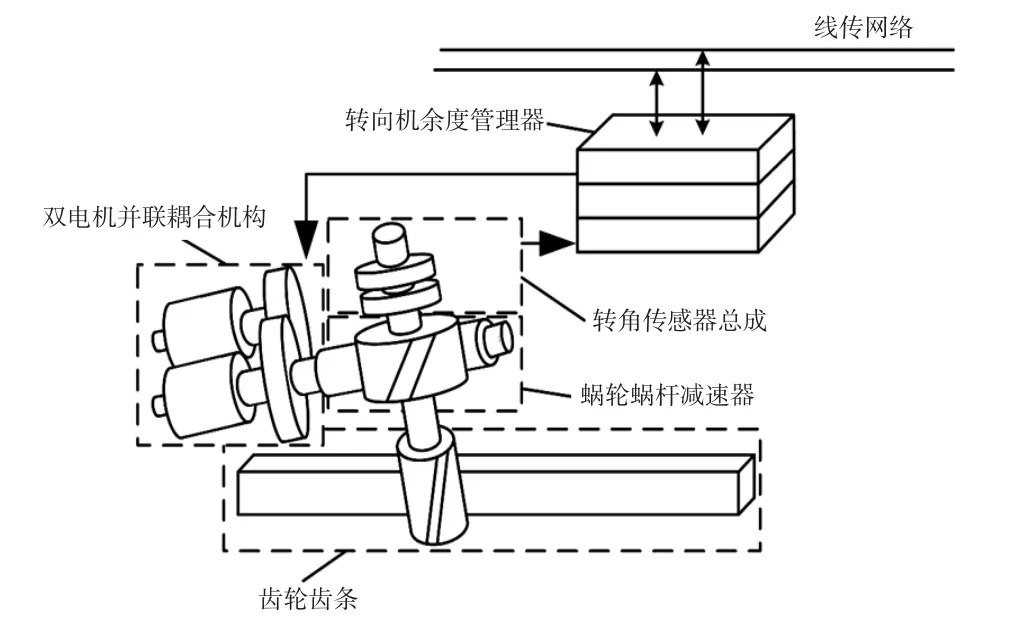
图1 完全双余度线传转向机的机电结构
如图1所示的双电机并联耦合机构由2个相同的电机经过一对齿轮并联耦合,构成双通道转角驱动,其输出轴经过蜗轮蜗杆减速机构减速后通过连接转向器的齿轮齿条驱动汽车转向。转角传感器总成由2个相同的转角传感器组成,实时感知齿轮齿条转向器的小齿轮转角以进行转向角度的反馈控制。
余度管理器一方面从线传网络接收转向盘转角信息,另一方面接收转角传感器总成的转角信息,以控制驱动双电机进行转向。此外,当一路通道发生故障时,余度管理器能检测到故障并对故障通道进行隔离,同时发出报警。
该结构中主要电子电气部件如转向电机、转角传感器及控制器均作了余度处理,保证它们中的任意一个发生故障后系统仍能正常进行转向,因此称为完全双余度线传转向机。
2.2 余度管理器架构
完全双余度线传转向机的余度管理器由3个控制器构成,其中2个控制器构成双通道电机驱动控制器,分别控制一路电机同步进行转向,第3个控制器对另2个控制器进行监控,以进行故障的隔离。完全双余度线传转向机的余度管理器架构如图2所示。

图2 余度线传转向机的余度管理器架构
图2中的CGU1、CGU2和CGU3为构成余度管理器的3个控制器,其中CGU1和CGU2分别通过电机驱动下位控制器CGM1和CGM2发送一定频率的PWM波控制各自通道的H桥驱动电路H1和H2进行电机MS1和MS2的控制。电机力经过齿轮对G1和G2耦合,再经蜗轮蜗杆减速器GW减速后驱动齿轮齿条GR。两路电机通道的电流传感器SMC1和SMC2测得各自通道电机的电流iSM1和iSM2,并发送给各自的控制器;与蜗轮轴同轴的转角传感器SPA1和SPA2同时采集小齿轮转角θSP1和θSP2,也发送给相应的控制器。3个控制器通过线传网络进行信息的交互。图中θW为转向盘转角,cs1、cs2和cs3分别为3个控制器的控制器状态信息,以互相进行控制器状态监控。
2.3 工作原理
如图2所示的完全双余度线传转向机余度管理器在正常工作状态下由CGU1和CGU2控制两电机进行转向,两路电机通道分别称为通道1与通道2。转向角度的闭环控制采用PID控制方法。工作过程中,CGU1和CGU2与以CGU3为控制器的通道3始终进行信息的交互与监控。当通道1或者通道2的转角传感器发生故障时,两路通道均诊断出故障传感器并采用正确传感器的值进行工作,系统不需要降阶;当通道1或者通道2发生包括控制器故障、电机故障等需要降阶的故障时,相应的另一通道诊断出该故障,并通过发送信号s21或s12经由电机驱动电路上的电子开关B1或B2切断故障通道的电机,保证转向在单电机下正常进行。同时,通道3的控制器检测到该故障,发送信号s31或s32经由逻辑电路B31或B32屏蔽故障通道的信号s21或s12,以防止错误通道对正常通道的误切断。在这样的机制下,保证余度转向的正常进行以及单故障下系统不失效。
3 完全双余度线传转向机的余度管理
完全双余度线传转向机由余度管理器控制其机电结构的两路电机同步进行转向。在此基础上,提出了完全双余度线传转向机的余度管理方法,保证系统的安全可靠性。
3.1 仲裁与故障诊断方法
完全双余度线传转向机的仲裁与故障诊断方法是对系统在运行过程中的各监控量进行运算及判断,以识别系统发生的故障。仲裁与故障诊断采用三状态量多阈值诊断方法,其满足:
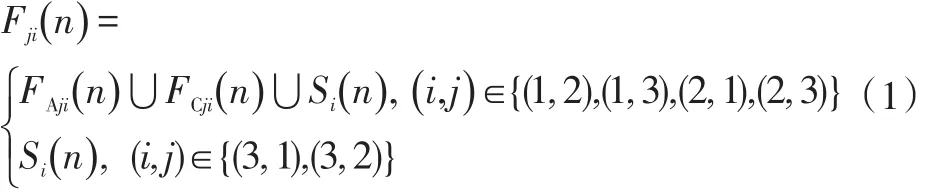
式中,Fji(n)为通道j的控制器对通道i故障的诊断状态,其为布尔型状态量,Fji(n)=1表示通道i发生故障,Fji(n)=0表示通道i未发生故障;FAji(n)、FCji(n)和Si(n)分别表示通道i的转角故障、电流故障和控制器自身故障,也为布尔型状态量,分别表征这3个状态量的故障情况,其中FAji(n)、FCji(n)分别表示通道j的控制器对通道i故障的诊断状态。
通道i的转角值、电流值以及控制器状态量为故障诊断的主要判断依据,对这3个状态量进行多项阈值判断的诊断方法,称为完全双余度线传转向机故障诊断的三状态量多阈值诊断方法。
对于式(1)的其他取值(i,j)∈{(1,1),(2,2),(3,3)},其物理含义为控制器对自身通道的自诊断,由于在本研究的仲裁和故障诊断方法中不进行控制器的自诊断,因此不作讨论。
3.1.1 转角故障诊断方法
FAji(n)表示转角故障的状态(包括转角传感器故障、转角传感器采集与接收故障、控制器内部转角信号处理故障),FAji(n)=1表示通道i的转角发生故障,FAji(n)=0表示通道i未发生故障。
对转角故障状态量FAji(n),有

式中,SAi(n)为转角信息检测状态量;SATi(n)为转角跟随检测状态量。
当SAi(n)=1或SATi(n)=1时,FAji(n)=1,即通道i发生转角故障。
式(2)中转角信息检测状态量SAi(n)满足

SA0i(n)为转角信息检测绝对值状态量,其满足

即转角传感器的转角θSPi(n)的绝对值需要在阈值δAS以内,否则认为通道i发生转角绝对值故障。
SA1i(n)为转角信息一阶差分状态量,其满足

式中,|ΔθSPi|=|θSPi(n)-θSPi(n-1)|,i=1,2。
即转角传感器的转角一阶差分的绝对值需要在阈值ΔδAS以内,否则认为通道i发生转角速度故障。
SA2i(n)为转角信息二阶差分状态量,其满足

式中,|Δ2θSPi|=|θSPi(n)-2θSPi(n-1)+θSPi(n-2)|,i=1,2。
即转角传感器的转角二阶差分的绝对值需要在阈值Δ2δAS以内,否则认为通道i发生转角加速度故障。
SATi(n)满足

式中,|ΔθATi|=|θSPi(n)-θWi(n)|,i=1,2;ΔθATi为转角跟踪差;θSPi(n)为当前转角;θWi(n)为转向盘转角。
即任意时刻的转角跟踪差ΔθATi(n)被限制在转角跟踪差阈值ΔδAT内,否则认为通道i发生了转角跟随故障。
当检测到一路转角发生故障时,两路通道均采用未故障通道的转角传感器值进行工作,此时即完成转角的仲裁。
SA0i(n)、SA1i(n)、SA2i(n)及 SATi(n)的i取值均为 1 和 2,表征其诊断对象为通道1和通道2。
3.1.2 电流的故障诊断方法
电流故障FCji(n)表示电流故障(包括电机故障、电流传感器故障、电流传感器的采集与接收故障、控制器内部电流信号处理故障),FCji(n)=1代表控制器i的电流发生故障,FCji(n)=0表示控制器i未发生故障。其满足

式中,SCi(n)为电流信息检测状态量;SCTi(n)为电流闭环检测状态量。
当SCi(n)=1或SCTi(n)=1时,FCji(n)=1,即通道i发生电流故障。
电流信息检测状态量SCi(n)满足

SC0i(n)为电流信息检测绝对值状态量,其满足

即电流传感器的转角ISMi(n)的绝对值需要在阈值δCS以内,否则认为通道i发生电流绝对值故障。
SC1i(n)为电流信息一阶差分状态量,其满足

式中,|ΔISMi|=|ISMi(n)-ISMi(n-1)|,i=1,2。
即电流传感器的电流一阶差分的绝对值需要在阈值ΔδCS以内,否则认为通道i发生电流速度故障。
SCTi(n)满足

式中,|ΔICTi|=|ISMi(n)-IGTi(n)|,i=1,2;ΔICTi为电流闭环差值;ISMi(n)为当前电流;IGTi(n)为目标电流。
即任意时刻的电流闭环差值ΔICTi被限制在电流闭环差阈值ΔδCT内,否则认为通道i发生了电流闭环故障。
SC0i(n)、SC1i(n)和SCTi(n)中的i取值均为1和2,表征其诊断对象为通道1和通道2。
除了转角故障与电流故障,式(1)中的Si(n)表示通道i的控制器发生自身故障(通道i的控制器向另外2个控制器发送特定的自身控制器状态信息,若接收不到则认为通道i的控制器发生自身故障),Si(n)=1代表通道i的控制器发生自身故障,Si(n)=0表示通道i的控制器未发生自身故障。
综合上述的转角故障诊断方法与电流故障诊断方法,定义单通道的故障特征矩阵Bi(n)为
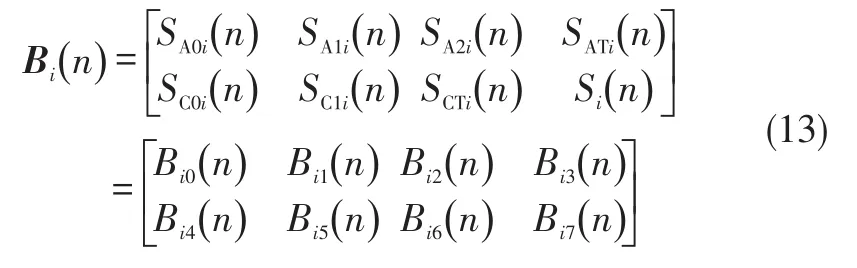
Bi(n)的取值与对应的基本故障事件如表1所示。
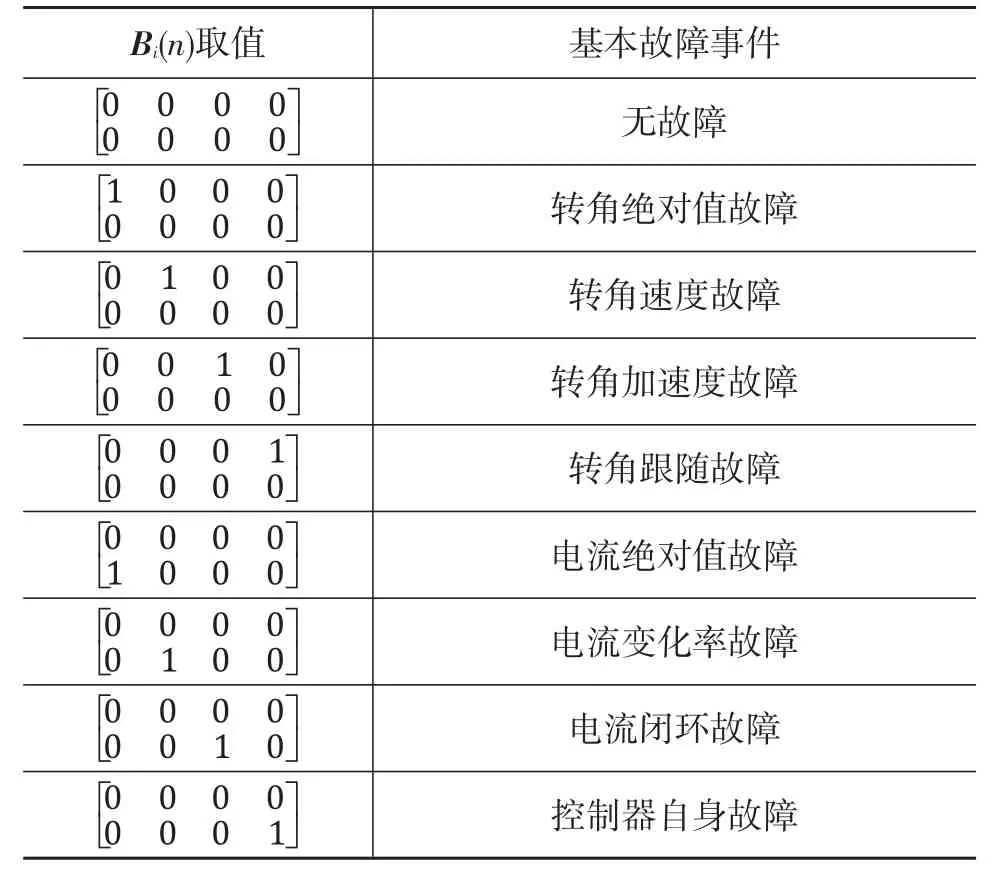
表1 Bi(n)取值对应的基本故障事件
定义故障特征量Ei1(n)、Ei2(n)分别为故障特征矩阵Bi(n)中第1行、第2行各元素之和,即
则若Ei1(n)>0,则认为通道i发生转角故障即非降阶故障,若Ei2(n)>0,则认为通道i发生非转角故障即降阶故障。
3.2 故障隔离、切换与报警方法
在完全双余度线传转向机故障诊断的基础上,对系统进行故障的隔离与报警,并对致命性的故障进行余度切换,以完成余度的降阶,保证系统的正常工作。
对系统报警指示量Aji(n),有

Aji(n)表示通道j的控制器对通道i的故障进行报警,其为布尔型状态量。当Aji(n)=1时进行报警,Aji(n)=0时则不报警。式(16)表明,通道j的控制器在对通道i进行故障诊断过程中,连续3次诊断出其出现故障,则认为通道i发生确实的故障,此时进行故障报警。由于通道不会对自身进行报警,因此(i,j)∉{(1,1),(2,2),(3,3)}。
由于发生转角故障时双通道均可用正确的转角值继续工作,因此转角故障仅进行报警,而不进行通道的隔离,称为非降阶报警,相应地,对电流故障及控制器自身故障的报警称为降阶报警,这一报警方法称为双模式报警方法。对通道i(i=1,2),定义其降阶故障检测状态量为

则故障隔离指示量Cji(n)满足

Cji(n)为表征故障隔离的布尔型指示量,其表示通道j的控制器对通道i的降阶性故障进行隔离。当Cji(n)=1时进行故障隔离,Cji(n)=0时则不进行故障隔离。与报警类似,故障的隔离也是连续3次检测到故障后进行。
由于故障的隔离基于3个控制器的共同作用,需要综合另外两路通道控制器的判断,因此实际的故障隔离特征量εi满足

当εi=0时,表示通道i被隔离;当εi=1时,表示通道i工作正常。当通道i被隔离后,系统即进行余度切换,在正常路通道电机作用下完成转向工作,(i,j)的取值表征只有通道1和通道2在故障时需要被隔离。
4 仿真验证
针对上述完全双余度线传转向机结构及余度管理方法,基于Matlab的Simulink平台搭建完全双余度线传转向机的仿真模型,与CarSim软件进行联合仿真,以验证完全双余度线传转向机的余度管理方法与转向能力。
4.1 仿真模型
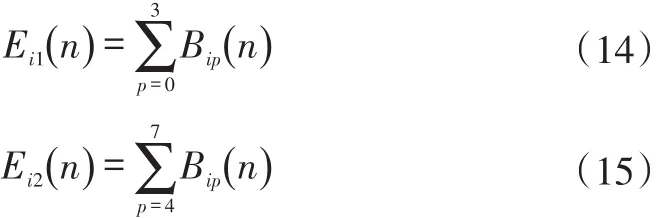
完全双余度线传转向机的仿真模型由转角传感器模块Sa1和Sa2、两路电机通道模块M1和M2、转向机机械耦合模块G以及Car Sim车辆模型构成,如图3所示。
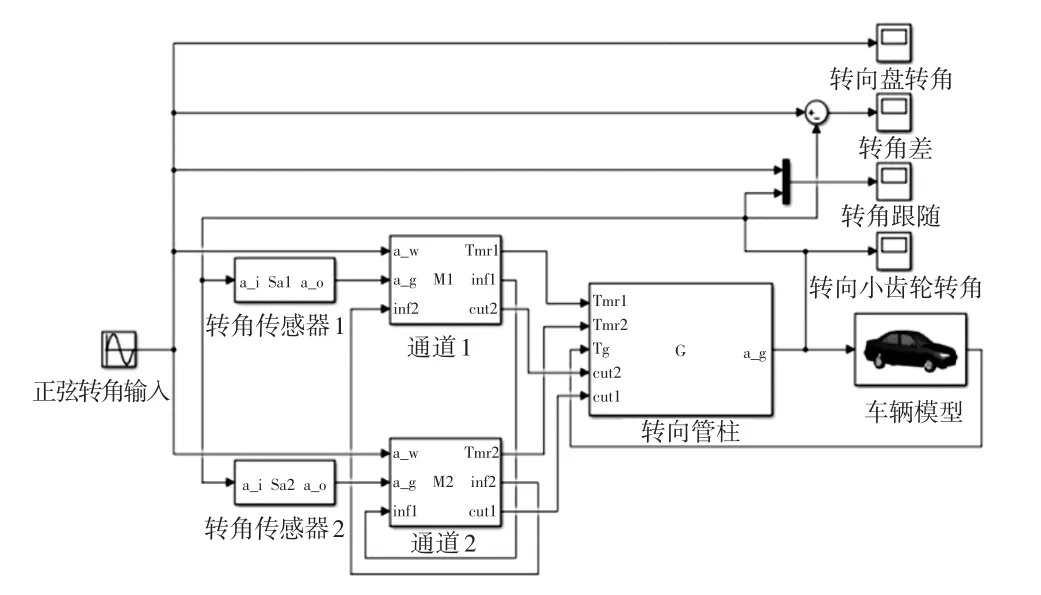
图3 余度线传转向机的仿真模型
转角传感器模块Sa1和Sa2仿真转角传感器,传递转角信息,并能进行转角故障的注入;两路电机通道模块M1和M2模拟电机通道,其内部进行电机的转向控制,并进行故障的诊断;转向机机械耦合模块G模拟转向机械部分,并进行故障的隔离;CarSim车辆模型通过前端模型输入转向角度,并向前端模型输出车辆回正力矩。系统总的输入为用正弦波模拟的转向盘转角输入。对于余度管理器通道3的余度管理功能,将其功能合并在电机通道模块的仿真模型中,以验证其功能。
4.2 余度管理仿真方法
如图3所示的完全双余度线传转向机仿真模型的余度管理包括在电机通道模块M1和M2中根据仿真信息实现前文所述故障诊断方法实现的故障诊断以及在转向机机械耦合模块G中实现故障的隔离。此外,在各模块中通过注入故障以模拟故障的发生。注入故障的类型如图4所示。
故障注入的类型分为信号断路故障与信号紊乱故障。如图4a所示的信号断路故障表征原信号在t0时刻发生信号断路,其实现方法是将原信号δ与信号断路故障曲线w1相乘;如图4b所示的信号紊乱故障表征原信号在t1到t2时刻发生幅度为h、时长为Δt的信号紊乱故障,其实现方法是将原信号δ与信号紊乱故障曲线w2相加。
图4 完全双余度线传转向机仿真的故障注入
4.3 仿真结果
对上述建立的完全双余度线传转向机仿真模型在运行过程中进行故障的注入,以验证仿真控制和余度管理的效果。故障注入的类型选取信号紊乱故障,在3.6s时刻对通道1的电机电流传感器注入幅度为10A的异常波动,转角跟随仿真曲线如图5所示。
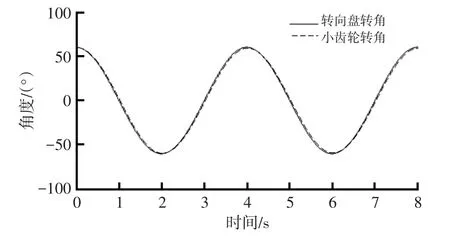
图5 电流故障仿真转角跟随曲线
从图5中可以看出,转角输入曲线(转向盘转角)与转角跟随曲线(小齿轮转角)十分接近,即使在发生故障后转角也未发生明显变化,说明系统的工作情况较好。将二者作差,得到转向盘与小齿轮的转角差曲线,如图6所示。
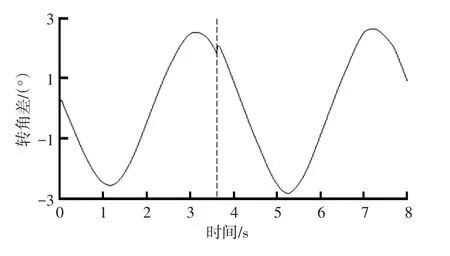
图6 电流故障仿真转角差
图6中,转向盘与小齿轮的转角差在仿真过程中始终保持在3°以内,折算到实际的车轮转角则属于非常小的值,说明跟随效果很好。在故障注入时刻,转角差增大幅度约为0.2°,说明余度切换对转向性能的影响很小。仿真过程中两通道电机的输出转矩如图7所示。
图7中,在故障时刻前,两电机同步输出转矩以驱动转向。在故障时刻,通道1电机发生故障,通道2的故障检测模块识别后通道1电机被迅速隔离,其输出转矩变为0,此时通道2电机转矩迅速增加至原来的约2倍以继续驱动转向,系统在通道2电机的作用下维持正常转向。
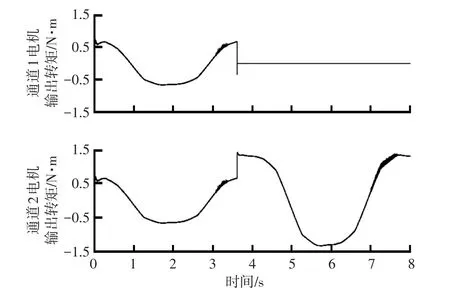
图7 电流故障仿真电机输出转矩
此外,对转角故障进行了仿真。对通道1的转角信号注入了在第3s时刻的信号断路故障,仿真得到的转角跟随曲线与图5相似,两电机的输出转矩如图8所示。
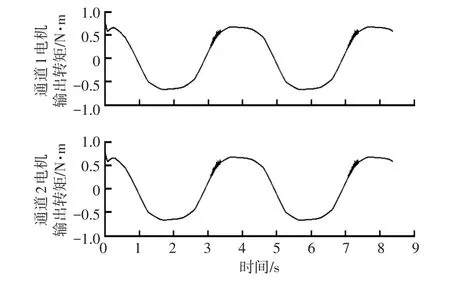
图8 转角故障仿真电机输出转矩
由图8可知,仿真过程中两电机始终输出相同转矩,由于转角故障为非降阶故障,系统并没有发生切换,两电机始终保持工作。系统故障诊断的结果可以从图9所示的故障报警曲线中看出。
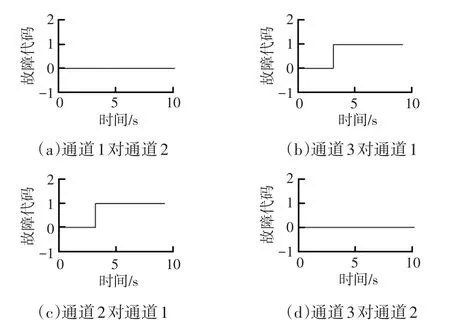
图9 转角故障仿真故障报警曲线
由图9可知,在第3s时刻通道1发生了转角故障,此时通道2和通道3检测到该故障并发出了报警信号,而通道2表现为正常。此时通道1的转角信号不再使用,两通道均根据通道2的转角继续进行转向。
控制器自身故障的仿真结果与电流故障类似,发生控制器自身故障的通道被迅速隔离,系统切换到单通道转向模式下继续进行转角的跟随。
5 结束语
针对完全双余度线传转向机及其余度管理问题,本文通过研究得出以下结论:
a.完全双余度线传转向机的结构能够有效执行转向功能并保证系统在单一故障下不失效,可以作为线传转向汽车的具有高安全可靠性的转向执行器。
b.三状态量多阈值的故障诊断方法、基于三控制器的故障隔离方法以及双模式故障报警方法的余度管理方法能够有效地识别并隔离完全双余度线传转向机运行过程中的故障,为线传转向汽车转向安全性的保证提供有效的余度管理方法。
c.Simulink与CarSim平台的完全双余度线传转向机联合仿真方法能有效模拟完全双余度线传转向机的运行状态和余度管理情况,为完全双余度线传转向机的余度管理方法的验证提供有效的平台。
[1]于蕾艳.汽车线控转向系统容错和故障诊断技术综述[J].重庆交通大学学报(自然科学版),2015,34(5):165-169.
[2] Road vehicles-Functional safety: ISO 26262:2011[S].
[3]付永领,庞尧,刘和松,等.基于故障建模的双余度舵机故障诊断技术[J].北京航空航天大学学报,2011,37(11):1372-1377.
[4]张新华.完全双余度电动舵机系统的研究与设计[J].微电机,2006,39(2):32-34.
[5]田承伟.线控转向汽车容错控制方法研究[D].长春:吉林大学,2010.
[6]何磊.基于FlexRay总线的线控转向系统双电机控制方法研究[D].长春:吉林大学,2011.
[7] Heitzer H D. Development of a fault-tolerant steer-by-wiresteering system[J]. AutoTechnology,2003,3(4):56-60.
[8] He L, Zong C, Chen S, et al. The Tri-Core Fault-TolerantControl for Electronic Control Unit of Steer-By-Wire System[J]. SAE Technical Paper,2011.
[9] Yao Y, Daugherty B. Control method of dual motor-basedsteer-by-wire system[J]. SAE Technical Paper,2007.
[10] Hayama R, Higashi M, Kawahara S, et al. Fault-tolerantautomobile steering based on diversity of steer- by- wire,braking and acceleration[J]. Reliability Engineering System Safety,2010,95(1):10-17.