变负载四旋翼无人机的轨迹跟踪控制器设计
2018-03-26袁锁中李华东
安 帅, 袁锁中, 李华东
(南京航空航天大学自动化学院,南京 210016)
0 引言
作为一种旋翼式无人机,四旋翼无人机具有垂直起降的能力且在军用和民用领域被广泛使用。传感器技术和微控制器的进一步发展使得实现更为先进的控制系统成为可能。在先进的控制系统作用下,四旋翼无人机能执行更加复杂的任务。
许多学者已经研究了很多关于四旋翼无人机的先进控制方法或策略。文献[1-3]深入地研究了四旋翼无人机的姿态稳定问题,但没有涉及路径跟踪;文献[4]把四旋翼无人机模型划分为全驱动与欠驱动子系统,然后采用全局快速动态末端滑模控制技术分别为两个子系统设计控制器,虽然能确保所有的系统状态变量及其导数都能在有限时间内收敛到零,但控制器形式十分复杂;文献[5]研究了在四旋翼无人机变负载情况下的轨迹跟踪控制,采用一种分层的非线性控制策略,设计基于自适应鲁棒反步法的内环控制器和基于全局滑模的外环控制器,虽然在外界扰动下能实现轨迹跟踪,但没有考虑负载减小的情况。
本文以四旋翼无人机仓库吊运为背景,对四旋翼无人机的轨迹跟踪控制问题进行研究。考虑到在短距离运输中装货/卸货导致负载突变以及外界扰动等对飞行性能的影响,采用内外环控制结构,结合鲁棒控制和自适应控制以减小参数变化和外界干扰所造成的影响。由于四旋翼无人机的负载是变化的,为了轨迹跟踪性能,运用一种自适应滑模控制策略设计外环控制器,采用自抗扰技术[6-8]设计内环控制器。
1 四旋翼无人机数学建模
本文所采用的四旋翼无人机模型如图1所示。图1给出惯性坐标系[I]和机体坐标系[B]的定义。坐标系[I]相对于地面是固定的,而坐标系[B]的原点固定在空载时四旋翼无人机的质心上。

图1 四旋翼无人机结构图Fig.1 Structure of quadrotor UAV
四旋翼无人机数学模型由以下运动学和动力学方程[9-10]描述

(1)

(2)
(3)
(4)
式中:向量ξ=(XYZ)T表示[B]的原点在[I]中的位置;向量η=(φθψ)T表示四旋翼无人机的姿态,其分量为欧拉角,即滚转角φ(-π/2<φ<π/2),俯仰角θ(-π/2<θ<π/2)和偏航角ψ(-π<ψ<π);向量ω=(pqr)T是四旋翼无人机的角速率;矩阵W(η)的定义如下

(5)


(6)
式(4)中:I是总的惯性矩;Ga代表陀螺力矩;τext是作用在四旋翼无人机上的干扰力矩;τ代表由旋翼产生的控制力矩,即
(7)
式中:d是阻力因子;l是电机中心到四旋翼无人机运动前的质心的距离。
在四旋翼无人机吊运货物过程中,装/卸货操作导致负载突变,从而使得系统重心在垂直方向上产生较大偏移,对四旋翼无人机垂直方向的运动影响较大。
2 控制器设计
2.1 控制系统结构
针对四旋翼无人机的轨迹跟踪问题,本文使用的控制系统结构如图2所示。为在外环中控制四旋翼无人机的平移运动,设计自适应滑模控制器,通过李雅普诺夫稳定性理论设计出对应的自适应律。基于自抗扰控制技术设计内环控制器,实现姿态稳定与跟踪。

图2 四旋翼无人机控制系统结构图Fig.2 Structure of the quadrotor UAV control system
2.2 外环控制器设计
对式(1)求导并代入式(3)中,得
(8)
平移子系统的相对阶为2。式中,Δ1=Fext与T之间不存在线性关系致使滑模控制器中的鲁棒切换项不能确保稳定性,需设计自适应律来估计外界扰动。
为实现轨迹跟踪控制,定义滑模变量
(9)
式中:控制增益λ=diag(λ1,λ2,λ3),λi>0(i=1,2,3);ξd是参考轨迹。对滑模变量s求导,得
(10)
令U1=TRe3为所设计的虚拟控制输入。为确保参考轨迹跟踪性能,设计U1为
(11)

(12)
选择自适应律为
(13)

考虑如下李雅普诺夫函数
(14)
根据式(11)可得
(15)
将式(15)代入式(12),得
(16)

(17)


(18)

(19)
考虑到负载的变化范围有界,使用离散投影映射方法对质量的自适应律进行修改。修正后的质量自适应律为
(20)

(21)
利用式(9)、式(11)、式(13)、式(20)和式(21)计算出U1。令U1=(U11U12U13)′,结合U1=TRe3,可得
(22)
在式(22)中,用ηd替代η,可得
(23)
2.3 内环控制器设计
为确定旋转子系统的相对阶,对式(2)求导,得

(24)
把式(4)代入式(24)中,可得式(25)。旋转子系统的相对阶是2。

(25)
为了控制器的设计,重写式(9)为
(26)

考虑式(25)所描述的多输入多输出(MIMO)的二阶系统,利用ADRC技术为其设计控制器使状态变量η能够很好地跟踪期望信号ηd。图3给出基于ADRC技术的解耦控制结构。
该控制系统包含滚转、俯仰和偏航通道,令虚拟控制量u=(u1u2u3)T=B2τ,在这3个通道中,基于ADRC技术的控制器设计步骤是相同的。下面以滚转通道的控制器设计为例详细讨论自抗扰控制器1的设计过程。自抗扰控制器1由非线性跟踪微分器(NTD),非线性反馈控制器(NFC)和扩张状态观测器(ESO)构成[7]。图4所示为出自抗扰控制器的结构,其中,F21是F2的第一个分量。

图3 基于自抗扰控制的MIMO系统解耦控制结构图Fig.3 Structure of the MIMO system decoupling control based on ADRC

图4 自抗扰控制器1的结构图Fig.4 Structure of active disturbance-rejection controller 1
使用NTD跟踪其输入信号并估计输入信号的微分值。本文使用二阶NTD,其离散算法[11]为

(27)

ESO的形式取决于被观测对象的形式和阶次。考虑到滚转运动子系统是一个二阶系统,设计如下的ESO
(28)
式中:y,u和F是ESO的输入信号,y表示被观测对象的输出量φ,u表示被观测对象的输入量u1,F=F21;zi(i=1,2,3)是输出信号;系数β0i(i=1,2,3)的取值使多项式λ(s)=s3+β01s2+β02s+β03是Hurwitz的[12]。根据文献[11],设计离散算法为
(29)
(30)

采用偏差信号与其导数的非线性组合设计NFC。由NTD给出x1和x2,由ESO给出z1和z2,求取其偏差值,使用fst函数构造NFC,即

(31)
式中:ci是阻尼因子;r1为控制器增益;速度因子h1>Ts。则自抗扰控制律为
u1=u10-z3-F21。
(32)
文献[13]已经证明自抗扰控制器的稳定性以及扩张状态观测器的收敛性。对于多输入多输出下三角系统,文献[14-15]已经研究基于自抗扰控制器的闭环回路性能和稳定性。
3 仿真结果及分析
本文使用式(1)~式(4)所描述的四旋翼无人机模型验证所设计控制策略的性能。空载下的四旋翼无人机物理参数由表1给出。在仿真开始时,给四旋翼无人机引入外界干扰,直至仿真结束。在仿真中,干扰被设置为Fext=(sin(0.1t);sin(0.1t);sin(0.1t)),单位为N,τext=(0.3sin(0.1t);0.3sin(0.1t);0.5sin(0.1t)),单位为N·m。
外环控制器的参数如下:λ=diag(0.1,0.2,2.3),c=diag(6.3,6.1,3.9),γ1=diag(0.7,0.7,0.4)和γ2=0.1。在滚转和俯仰通道中,自抗扰控制器参数如下:Ts=h=0.01 s,r=1065,β01=100,β02=700,β03=4500,cφ,θ=4.5,r1=30和h1=10。在偏航通道中,除了cψ=5.5以外,剩下参数都与上述的自抗扰控制器参数一致。

表1 空载下的四旋翼无人机参数
四旋翼无人机的初始位置位于坐标系[I]的原点,且初始姿态角为η(0)=(0 0 0)T,单位为(°),所以在仿真开始时,四旋翼无人机需要执行垂直起飞动作。此外,期望的偏航角都为零。
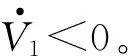
图5~图7给出仿真实验结果。从图5中的参考路径和实际路径可看出,四旋翼无人机首先垂直起飞,到达指定高度后开始跟踪螺旋线轨迹。在整个过程中,由于干扰的存在和质量的突变,四旋翼无人机的轨迹会偏离期望路径,但其跟踪误差相对较小,可知所设计的控制器能够有效地解决变负载四旋翼无人机在扰动存在情况下的轨迹跟踪问题。由图6可知,在跟踪路径的过程中,负载的初始重量为3 kg,而且四旋翼无人机分别进行了两次卸货和一次装货。图7给出控制输入信号的变化,可见负载突变对其影响较大。

图5 路径跟踪Fig.5 Path tracking

图6 质量估计Fig.6 Estimation of mass

图7 控制输入Fig.7 Control inputs
图6中的质量估计曲线始终未能收敛到实际值曲线的原因是滑模变量不断地来回穿越滑模面使得质量的估计偏差在有界范围内变化而不是变为零。质量估计偏差的有界性是滑模变量趋近于零的条件之一。从图6中可以看出在两次卸货操作后,质量估计的偏差已经缩小许多。当t分别为30 s,55 s和80 s时,质量估计满足式(19)。
4 结束语
本文提出将自抗扰控制技术和自适应滑模控制方法相结合解决变负载四旋翼无人机的轨迹跟踪问题。由内外环控制结构组成的控制策略考虑了外界扰动。针对四旋翼无人机的平移运动,使用自适应滑模控制器组成外环,确保参考路径的跟踪。在内环中,设计基于自抗扰技术的控制器,稳定与跟踪姿态。通过仿真实验验证了所设计控制器的鲁棒性和有效性。
[1] KHATOON S,SHAHID M,IBRAHEEM,et al.Dynamic mo-deling and stabilization of quadrotor using PID controller[C]//International Conference on Advances in Computing, Communications and Informatics,2014:746-750.
[2] LEE J,LEE C,KIM D E.Attitude control of quadrotor with on-board visual feature projection system[C]//IEEE/rsj International Conference on Intelligent Robots and Systems,IEEE,2013:2426-2431.
[3] LI Z,MA X,XU Z G,et al.Chattering free sliding adaptive attitude control for quadrotor[C]//IEEE Chinese Guidance,Navigation and Control Conference (CGNCC),2016:707-712.
[4] ZUO Z.Adaptive trajectory tracking control design with command filtered compensation for a quadrotor[J].Journal of Vibration and Control,2013,19(1):94-108.
[5] WANG C,SONG B F,HUANG P F,et al.Trajectory tracking control for quadrotor robot subject to payload variation and wind gust disturbance[J].Journal of Intelligent & Robotic Systems,2016,83(2):315-333.
[6] GAO Z Q.Active disturbance rejection control:a paradigm shift in feedback control system design[C]//American Control Conference,IEEE,2006:2399-2405.
[7] HAN J Q.From PID to active disturbance rejection control[J].IEEE Transactions on Industrial Electronics,2009, 56(3):900-906.
[8] HUANG Y,XUE W C.Active disturbance rejection control:methodology and theoretical analysis[J].ISA Transactions,2014,53(4):963-976.
[9] ZUO Z Y.Adaptive trajectory tracking control design with command filtered compensation for a quadrotor[J].Journal of Vibration and Control,2013,19(1):94-108.
[10] RAFFO G V,ORTEGA M G,RUBIO F R.An integral predictive/nonlinearH∞control structure for a quadrotor helicopter[J].Automatica,2010,46(1):29-39.
[11] GAO B W,SHAO J P,YANG X D.A compound control strategy combining velocity compensation with ADRC of electro-hydraulic position servo control system[J].ISA Transactions,2014,53(6):1910-1918.
[12] BALAJIWALE S,ARYA H,JOSHI A.Study of performance of ADRC for longitudinal control of MAV[J].IFAC-Papers Online,2016,49(1):585-590.
[13] ZHENG Q,DONG L L,LEE D H,et al.Active disturbance rejection control for MEMS gyroscopes[C]//American Control Conference,IEEE,2008:4425-4430.
[14] XUE W C,HUANG Y.The active disturbance rejection control for a class of MIMO block lower-triangular system[C]//The 30th Chinese Control Conference(CCC), 2011:6362-6367.
[15] XUE W C,HUANG Y.On performance analysis of ADRC for a class of MIMO lower-Triangular nonlinear uncertain systems[J].ISA Transactions,2014,53(4):955-962.
