基于小波时间延迟估计的宽带信号波束形成算法研究
2018-03-26刘影,谢驰
刘 影,谢 驰
(1.电子科技大学能源科学与工程学院 成都 611731;2.四川大学电子信息学院 成都 610065)
目前自适应阵列信号处理技术在雷达、声纳和移动通信系统中有着越来越多的重要应用[1]。宽带信号波束形成算法可以采用时域和频域分析方法。文献[2]采用基于均匀一致性旁瓣级的设计方法,将宽带信号用一组有限脉冲响应(finite impulse response, FIR)滤波器来拟合,从而实现恒定束宽的波束形成。但该方法存在迭代收敛步长难以确定的问题,因而算法精度不高,收敛速度慢。FIR抽头系数较多,虽然可以采用无限脉冲响应(infinite impulse response, IIR)减轻矩阵运算的高复杂性,但IIR算法的不稳定性也使得IIR算法的收敛速度变慢[3]。时域的自适应滤波处理虽然对窄带干扰具有较好的抑制能力,但对滤波算法的稳定性要求较高,且时域收敛速度较慢,不适合用于干扰快速变化的情况[4-5]。
频域方法对阵列接收数据按照频率进行分块,并通过离散傅里叶变换(discrete Fourier transform,DFT)将时域数据转换成频域数据,由于在子块中信号频宽较窄,可以通过独立的窄带波束形成器实现波束成形,最后通过合成实现宽带信号波束成形[6]。文献[7-8]分别采用频率矩和滑动窗函数的方法,在有效地进行宽带波束形成的同时也抑制了宽带干扰。而小波算法可以根据频率的高低自动调节窗口大小,是一种自适应的时频分析方法,可以实现数据实时性处理能力的提高。
对于阵列信号处理技术中的波束形成方法,目前最广泛采用的是最小方差无失真响应(minimum variance distortionless response, MVDR)波束合成、对角加载方法、旁瓣对消器(generalized sidelobe canceller, GSC)[9-12]。目前对波束形成技术的使用往往是在已知接收信号频率带宽的情况下进行的,然而在实际通讯中随着城市中建筑物的增多,在无线通讯中接收端不可避免地接收到多径信号。由于多径效应而产生的不同时间延迟扩展信号,使波束形成系统的通信质量下降。因此精确的时间延迟估计(time delay estimation, TDE)是提高波束形成精确度的重要内容。文献[13-14]提出了基于强噪声干扰的广义相关时间延迟估计测量算法,文献[15-16]提出了高阶与分数阶累积量方法,但是对于宽带信号时域算法的抗噪声性能降低,而频域算法无法提供足够多的有效频率采样点,现有的时间延迟算法效果不理想[17-18]。因此,本文提出了一种基于时间延迟估计的宽带信号波束形成方法,该方法通过引入加权函数因子,并对每次波束图主瓣迭代所获得的时间延迟估计值和实际期望信号的时延估计值之间误差与系统预存阈值相比较,从而不断迭代加权函数得到期望波束图的主瓣方向,形成整体的自适应波束。该算法在降低计算低复杂度和提高收敛速度方面具有一定优势。
1 接收信号的时间延迟模型分析
时间延迟估计是利用对不同的接收器接收到信号的时间差进行估计,从而确定信源的距离、方位、速度和移动方向等相关参量。设发射信号为x(t),采样信号时间间隔为Ts,经过阵元个数为M的阵列系统采样后的接收信号为:

式中,I为多径的数目;τi和τ分别为第i个多径路线所产生的时间延迟和系统产生的总时间延迟量;x(t)为发射信号的采样值;n(t)为零均值噪声;ai为第i个路线的幅度。将接收到的多径信号进行泰勒公式展开,得:

对y(t+τ)进行泰勒公式展开,有:

阵列系统接收到的时间延迟误差τ近似为:

2 基于小波滤波器组的时间延迟估计
设小波母函数ψ(t)为一平方可积函数,假定所要分析的函数是任意函数f(t),设pj f(t)代表f(t)在子空间Vj上的投影,该投影可以用小波变换的尺度空间的线性组合来表示,有:

式中,cj,k是各线性组合的权值。设为在子空间Vj+1上的投影,则:



式(9)和式(10)表明,经j−1尺度空间的尺度系数和抽头长度为2k的h(k)滤波器和g(k)滤波器的加权求和可以得到j尺度空间的尺度系数和小波系数。第j级小波分解对应的矩阵(J为分解层数)为:

小波分解的矩阵表达式为:

因此,小波滤波器h(k)和尺度滤波器g(k)将信号分解为低频分量和高频分量,从而减小了信号的相干性,提高自适应信号处理的速度。图1为基于多通道小波算法的时间延迟估计框图。
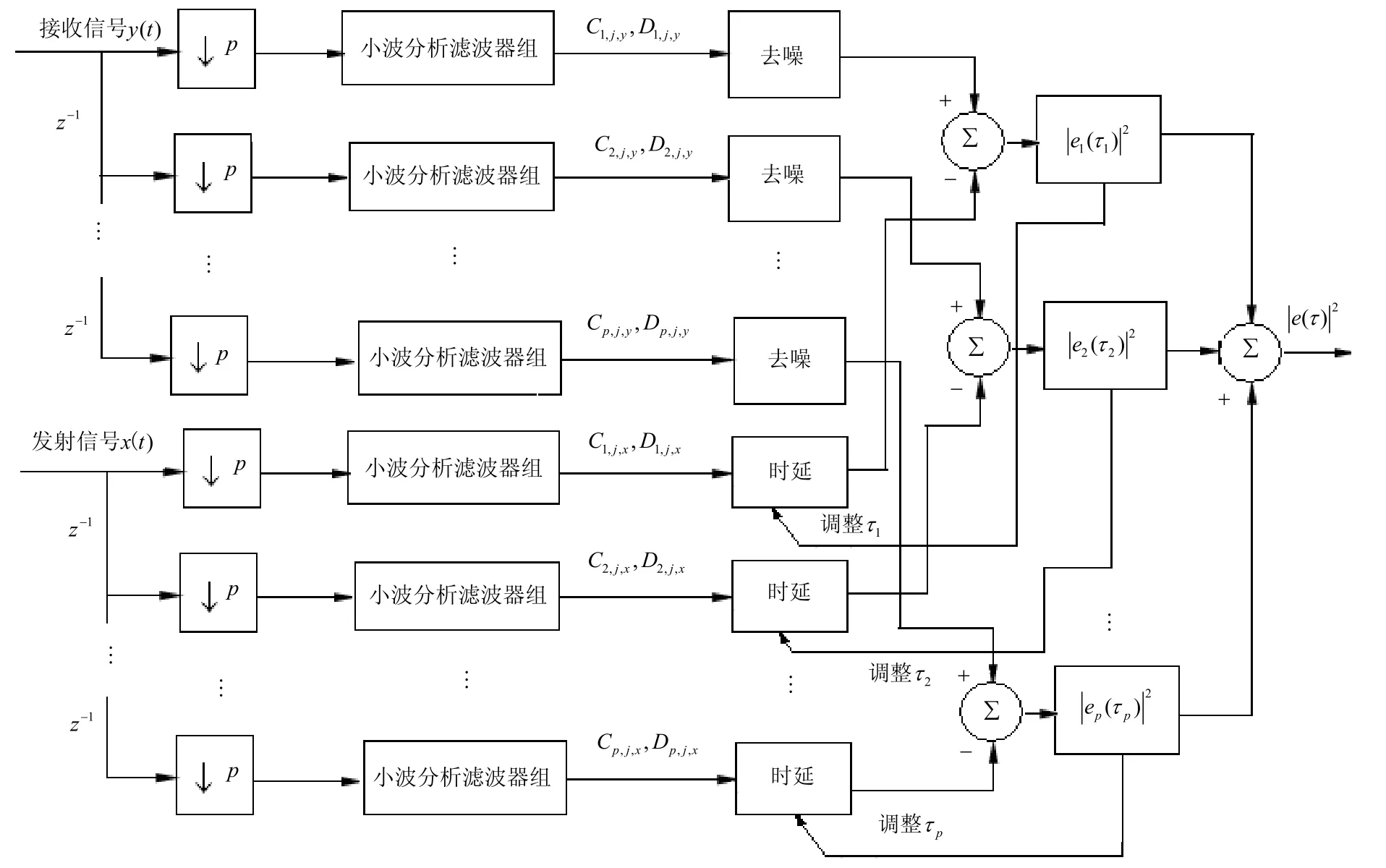
图1 基于多通道小波滤波器组的时间延迟估计结构图
对基于多通道小波算法的多通道数据采集中,通道抽取数目设为P个,每一通道中的信号分解级数为J,则算法步骤为:
1)对发射信号x(t)先进行P次多速率抽取,得到P个子带信号,再对每个子带信号进行j级小波变换,获得逼近信号Cp,j,x和细节信息Dp,j,x,同时对接收信号y(t)进行P次多速率抽取,得到P个子带信号,然后对每个子带信号进行j级小波变换,得到逼近信号和细节信息,其中
2)在第p个子带的第j级上,对逼近信号Cp,j,x和细节信息分别进行延时并与和比较,找到使平方误差最小的时延τp,其中:
3)设τp为小波变换第j级得到的时间延迟估计值,计算实际信号的时间延迟估计值
3 基于小波时间延迟估计的波束形成算法
可以根据接收到期望用户的信号特征对系统中已经预存的多个波束进行补偿,达到在空间中形成整体自适应波束的目的,从而通过多波束形成技术有效增加波束的覆盖能力。波束切换方法在多波束中对期望信号的方向进行跟踪,因而新算法只需优化子波束,避免计算复杂的高维系统矩阵,降低系统成本。本文设计的基于小波时间延迟估计的波束形成算法可以分为二级优化处理过程。第一级是对均匀线阵进行多波束运算,在空间中覆盖整个输出波束的K个子波束;第二级是对子波束中最接近期望信号方向的子波束,通过实际的期望信号方向和估计期望信号方向到达阵元的迭代的延时估计值误差与设定的阈值进行比较,最终获得主瓣指向期望信号的多波束方向图。在第一系统级中,信号源X(f,θ)被具有M个阵元的均匀线阵接收,并进行K(K≤M)点的离散傅里叶变换形成多波束,其中第k个波束的表达式为:


假设一个16阵元的均匀线阵,阵元间距为λ/2,离散傅里叶波束形成器输出16个波束,分别为k=−8,−7,−6,…,6,7,则通过式(14)可以得到16个波束中每个波束相应的方位角:90°, ±61.04°, ±48.59°,±38.68°, ±30°, ±22.02°, ±14.48°, ±7.18°, 0°。因此,对于实际期望方向与多波束形成的方向有误差时,可以在阵元之间插入相移动时波束图的主瓣方向对准期望信号方向,但相移是频率函数,因而多用于对窄带信号源的波束形成处理中。对于宽带信号源,可以在数据处理中插入时间延迟估计值来补偿已知的权重,形成波束的主瓣方向与实际期望信号的方向一致。设第k个子波束的主瓣方向最接近期望信号的方向,该子波的波束图为参考波束与期望波束的主瓣响应之间的相位差为ξ。对于已知的波束主瓣区域为其中θNL和θNR分别为主瓣区域的左角度和右角度。对于子波第i+1次迭代后的波束图为,其中为在该区间离散化值,波束图的迭代调整为:

式中,τ*为在子波速方向的信号到达阵列的延时估计值;τ为期望信号方向到达阵元的延时估计值;ε为阈值,由τ*与τ之间的允许误差值确定;Km是波束主瓣区域的迭代增益。根据最小均方误差准则使输出估计误差ε的均方值最小,通过拉格朗日乘子法可得:

式中,a为方向导向矢量。
根据式(16)解得第i+1次迭代的波束形成加权向量为:

本文提出的波束形成算法步骤为:
1)通过多波束形成算法式(14)在空间形成多个子波束,寻找最接近期望信号方向的子波束,对相位误差区域离散化,初始化Km,ε;
3)通过式(19)计算新的加权向量和波束图;
4)计算实际的期望信号方向和估计期望信号方向到达阵元的时间延迟估计值之间的误差,并设定允许的误差值为ε,如果误差值小于ε则停止迭代,否则转到步骤2)。
4 仿真计算
首先对宽带线性调频接收信号进行时间延迟估计,假设阵列接收到的信号带宽为B=200 kHz ,载波频率为,系统的采样频率为采样点数为1 024点,信号函数表达式为:

式中,K=B/T,设系统接收到的信号是由3个多径信号相加构成:每个信号的幅度分别为当信噪比为15 dB时,小波滤波器分解次数为4次。图2为基于小波函数的时间延迟估计误差曲线。

图2 时间延迟估计误差曲线
从图2看以出,小波滤波器组在第4级时的估计时间延迟τp分别为10、18、24 ns,信号的时间延迟为(j为小波函数级数为4,P为滤波器的阶数8),可见基于多通道小波滤波组的时延估计为由此可见基于多通道小波滤波器组的时延估计方法能正确估计出信号的实际时延。
设多波束形成系统为一个8阵元的均匀线阵,阵元间距为λ/2,K=8,形成8个子波束,角度区域为[−90°,90°],通过式(14)得到每个波束的方位角为90°,±48.59°, ±30°, ±14.48°, 0°。图3为该多波束算法的波束图。信噪比为SNR=30dB的期望信号入射方向θ=40°。对子波束的主瓣方向与实际期望信号方向的误差角度区域以间隔1°进行离散化,得到N=8个离散角度,主瓣迭代增益Km=0.1,主瓣区域设计能容忍的误差最大值ε=0.05μs ,根据给出的方法进行加权迭代。图4a为基于小波时间延迟的波束形成算法的波束图,图4b为波束形成误差迭代图。

图3 多波束算法的波束图

图4 基于小波时间延迟的波束形成算法
从图3可知,由于经过离散傅里叶运算子波束呈sinx/x的形状,具有良好的正交性,但图中的子波束的指向性相对实际的期望信号具有一定的相位误差,需要进行修正。
从图4a可知,经过引入加权函数因子,通过不断迭代加权函数进一步使子波束的主瓣方向优化拟合期望信号方向,通过迭代计算后选择的子波束能够对期望信号有很好的指向性,但其他子波束之间仍具有良好的正交性,从而可以获得整个信号空间的波束图。从图4b看出经过80次迭代后时延误差小于给定阈值。
5 结束语
本文基于小波多分辨方法的时间延迟估计算法,通过小波的分解与重构算法在不同的分辨率级别上进行时延估计,以提高时延估计的准确性和算法的速度。本文提出通过引入加权函数因子,对每次迭代产生的主波束的时间延迟估计值和预存期望方向主波束的时间延迟估计值进行误差比较的多波束形成算法,通过对加权函数的不断迭代得到期望的主瓣方向,从而在空间中形成整体的自适应波束图。
[1]CAO Bin, YU Jia, WANG Ye, et al.Enabling polarisation filtering in wireless communications: Models, algorithms and characteristics[J].IET Communications, 2013, 7(3):247-254.
[2]范展, 梁国龙.基于凸优化的最小旁瓣恒定束宽时域宽带波束形成[J].电子学报, 2013, 41(5): 943-948.FAN Zhan, LIANG Guo-long.Broadband beamforming with minimum sidelobe and constant beamwidth based on convex optimization[J].Acta Electronica Sinica, 2013, 41(5):943-948.
[3]ACOSTA R, HARIHARAN S I.2-D-IIR time-delay-sum linear aperture arrays[J].IEEE Antennas and Wireless Propagation Letters, 2014, 13: 591-594.
[4]吴梦, 刘宏伟, 周生华, 等.基于干扰位置预测的稳健波束形成方法[J].电波科学学报, 2015, 30(3): 487-503.WU Meng, LIU Hong-wei, ZHOU Sheng-hua, et al.Robust beamforming based on interference location prediction[J].Chinese Journal of Radio Science, 2015, 30(3): 487-503.
[5]任超, 吴嗣亮, 王菊, 等.基于空时处理的稳健自适应波束形成算法[J].电子与信息学报, 2009, 31(6): 1381-1385.REN Chao, WU Si-liang, WANG Ju, et al.A robust adaptive beamforming algorithm based on space-time processing[J].Journal of Electronics & Information Technology, 2009,31(6): 1381-1385.
[6]李根, 马彦恒, 董建.宽带阵列雷达发射波束形成方法[J].电光与控制, 2016, 23(6): 100-104.LI Gen, MA Yan-heng, DONG Jian.Transmitting beam forming method for wideband array radar[J].Electronics Optics & Control, 2016, 23(6): 100-104.
[7]陈希信, 韩彦明, 于景兰.高频雷达自适应波束形成抗干扰研究[J].电波科学学报, 2010, 25(6): 1169-1174.CHEN Xi-xin, HAN Yan-ming, YU Jing-lan.Research for interference suppression in HF radar based on ADBF[J].Chinese Journal of Radio Science, 2010, 25(6): 1169-1174.
[8]LI Ying , JANDHYALA V.Design of retrodirective antenna arrays for short-range wireless power transmission[J].IEEE Trans on Antennas and Propagation, 2012, 60(1): 206-211.
[9]VALLET P, MESTRE X, LOUBATON P.Performance analysis of an improved MUSIC DOA estimator[J].IEEE Trans on Signal Processing, 2015, 63(23): 6407-6420.
[10]SULEIMAN W, PESAVENTO M, ZOUBIR A M.Performance analysis of the decentralized eigende composition and ESPRIT algorithm[J].IEEE Trans on Signal Processing, 2016, 64(9): 2375-2386.
[11]CAI Jing-jing, BAO Dan, LI Peng, et al.DOA estimation via sparse recovering from the smoothed covariance vector[J].Journal of Systems Engineering and Electronics,2016, 27(3): 555-561.
[12]TZAFRI L, WEISS A J.High-resolution direct position determination using MVDR[J].IEEE Trans on Wireless Communications, 2016, 15(9): 6449-6461.
[13]郑胜家, 韩东, 李晓, 等.匹配场定位强干扰抑制最小方差无畸变响应处理技术[J].仪器仪表学报, 2014,35(7): 1586-1593.ZHENG Sheng-jia, HAN Dong, LI Xiao, et al.Processor of minimum variance distortionless response with strong interference suppression for matched field processing[J].Chinese Journal of Scientific Instrument, 2014, 35(7):1586-1593.
[14]LEI Bo, YANG Yi-xin, YANG Kun-de, et al.A hybrid passive localization method under strong interference with a preliminary experimental demonstration[J].EURASIP Journal on Advances in Signal Processing, 2016, 2016(1):1-9.
[15]孙颖.时间延迟估计的高阶谱矩估计算法[J].长春大学学报, 2003, 13(6): 13-14.SUN Ying.Estimation algorithm for higher order spectral of time delay estimation[J].Jounral of Changchun University, 2003, 13(6): 13-14.
[16]陶艳, 郝新红, 岳凯, 等.基于分数阶域瞬时频率估计的线性调频引信测距性能分析[J].制导与引信, 2015,36(4): 13-19.TAO Yan, HAO Xin-hong, YUE Kai, et al.Range performance based on fractional Fourier domain instantaneous frequency estimation for linear frequency modulated fuze[J].Guidance & Fuze, 2015, 36(4): 13-19.
[17]王毅, 吴长奇, 胡双喜.TDOA中几种时延估计算法的比较[J].无线电通信技术, 2008, 34(1): 52-55.WANG Yi, WU Chang-qi, HU Shuang-xi.Comparison of several time delay estimation algorithms for TDOA[J].Radio Communications Technology, 2008, 34(1): 52-55.
[18]李雪梅, 陶然, 王越.时延估计技术研究[J].雷达科学与技术, 2010, 8(4): 362-371.LI Xue-mei, Tao Ran, WANG Yue.Summary of the time delay estimation[J].Radar Science and Technology, 2010,8(4): 362-371.
