压阻式触觉传感器对法向力和剪切力的检测
2018-03-26许玉杰尹泽楠
许玉杰, 孙 英, 尹泽楠
(河北省电磁场与电器可靠性重点实验室 河北工业大学,天津 300130)
0 引 言
“机器人柔性敏感皮肤”已成为智能机器人触觉传感器技术领域的一个研究热点[1]。所谓“柔性”是指触觉传感器具有类似于人类皮肤一样的特性,可以覆盖在任意的载体表面测量受力信息,从而感知目标对象的性质特征[2]。类似于人类皮肤,机器人敏感皮肤或者人工假肢是面积大并且具有数据处理能力的柔性微型传感器阵列[3]。由于外部环境的复杂性,要求触觉传感器能够检测外部的多个物理量以满足需求。目前,导电橡胶广泛应用于触觉传感器,可使电阻式传感器的结构简单,响应时间短,频率响应特性好[4]。
压阻触觉传感器利用弹性体材料的电阻率随压力大小的变化而变化的性质制成,并将接触面上的压力信号转换为电信号[5]。压阻式触觉传感器可伸展、增强抓取质量、测量不同范围力,国内学者对力敏导电橡胶进行了理论研究[6],增加触觉的灵敏度和灵活性已成为提高触觉传感器性能的主要研究点[7]。压阻式触觉传感器采用导电聚合物的弹性空心球结构,可以提高传感器的灵敏度和灵活度[8~10]。使用压阻式触觉传感器辨别力的大小和方向时,可实现进一步的解耦分析[11]。文献[12]将法向力和剪切力作用在传感器单元的同一表面,通过对传感器进行法向力和剪切力特性测试及动态响应与恢复特性测试,表明该传感器可以作为仿生皮肤实现触觉感知功能。
本文采用不同元件测量法向力和剪切力,提高了传感器效率。
1 工作原理
触觉传感器为基于导电橡胶的压阻式触觉传感器,由5只传感元件组成,各传感元件表面附着复合薄膜,如图1(a)所示,薄膜表面有微球体凸起以增强灵敏度,复合薄膜由碳纳米管(carbon nanotube,CNT)和聚二甲基硅氧烷(polydimethylsiloxane,PDMS)的混合材料所制。导电橡胶具有良好的压阻特性,压力越大,电阻值越小[13]。
传感器的工作部分可以分为中心部分和4个侧壁结构,如图1(b)所示,中心芯由在底部壳体上堆叠的两个长方体块组成,底端外壳为PDMS材料,在X-Y平面上受到剪切力时,相比于Z方向,中心芯在X和Y方向的移动范围更大。中间部分由导电聚合物制成并且呈现长方体形状,可用作所有感测元件的参考电极。CNT/PDMS复合材料薄膜附着于中心长方体的5个表面,长方体底面直接接触底部PDMS壳体,4个长方体侧壁表面积足够大,并在其表面附着有测量剪切力的传感元件,顶盖部分仅用于测量法向力,因此,其厚度远小于中心芯的整体厚度。将触觉传感器置于PDMS壳体中,PDMS壳体对感测元件提供保护,同时确保传感器的灵活性。受力时,力信号转换成电信号,通过外部电路采集。
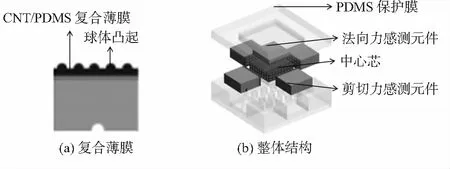
图1 触觉传感器结构
2 实验结果分析
传感器具有3种不同的测量方式:1)对法向力的测量,在顶部PDMS外壳上施加法向力,测量出中间部分和顶盖部分之间的电阻值变化得到施加的法向力;2)对剪切力的测量,在顶部PDMS外壳上施加剪切力,监测中间部分与任意侧壁结构中间的电阻值变化得到剪切力大小,力的施加如图2所示;3)能够定性观察法向力和剪切力传感元件之间的干扰。
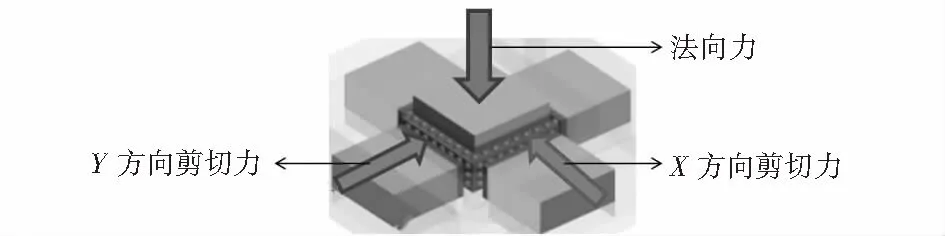
图2 触觉传感器受力
测量施加法向力时触觉传感器的响应,在传感器的顶部外壳上施加法向力,大小为0~50 kPa,增量为5 kPa,图3(a)给出了施加法向力时感测元件的电阻值随着所施加力的变化趋势。缩小施加力的增量为100 Pa,得出可测得的最小力为600 Pa,最大力为65 kPa。同理,测量施加剪切力时触觉传感器的响应,施加力大小为0~10 kPa,增量为1 kPa,图3(b)给出了施加剪切力时感测元件电阻值的变化。缩小施加力的增量为100 Pa,可测量的最小剪切力为900 Pa。

图3 触觉传感器测试响应
该触觉传感器的特性是能够降低法向力感测元件与剪切力感测元件之间的干扰,提高测量的准确性,图4(a)和图4(b)分别为施加法向力和剪切力时法向力感测元件阻值的变化。由图可知,当力增加到一定程度时,法向力感测元件的阻值发生剧烈变化,之后阻值变化同样剧烈,与此同时,法向力增大时,剪切力感测元件的阻值几乎无变化。因此,施加法向力时仅对法向力感测元件的阻值产生影响,而对剪切力感测元件阻值的影响非常小,触觉传感器法向力感测元件与剪切力感测元件之间几乎无干扰。
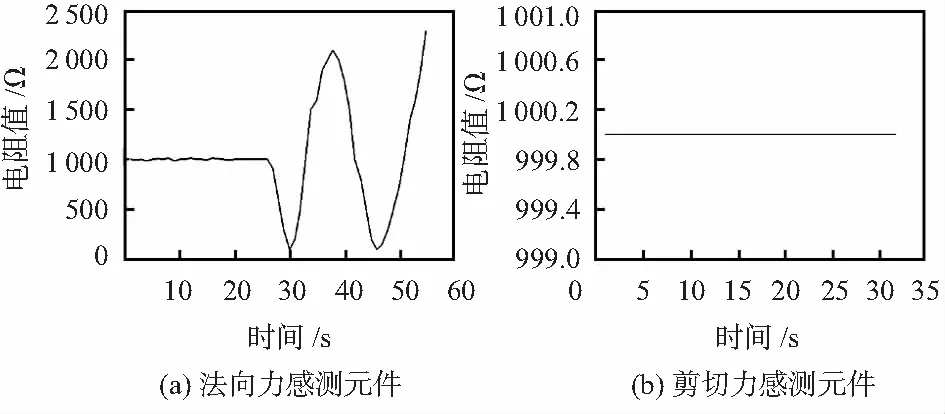
图4 2种感测元件中的电阻值变化
3 结 论
触觉传感器可以通过不同的感测元件测量施加的法向力和剪切力,所测力的范围足够大,并且法向力感测元件和剪切力感测元件互不影响,不需采用感测模块测量三维力,提高了传感器的工作效率。经过仿真实验知触觉传感器感测力的范围足够大。该传感器可用于机器人手臂和人工假肢上,能够较快识别法向力和剪切力,提高其灵敏度和灵活性。但由于此种结构设计感测元件多,模块较多,使得传感器体积较大,需要进一步的优化设计。
[1] 郝传光.三维柔性触觉传感器的信息提取与分析[D].合肥:中国科学技术大学,2010.
[2] 徐 菲.用于检测三维力的柔性触觉传感器结构及解耦方法研究[D].合肥:中国科学技术大学,2011.
[3] 黄 英,陆 伟,赵小文,等.用于机器人皮肤的柔性多功能触觉传感器设计与实验[J].机器人,2011,33(3):347-359.
[4] 王 钰,李 斌.柔性触觉传感器主要技术[J].传感器与微系统,2012,31(12):1-4.
[5] 黄 英,明小惠,向 蓓,等.一种新型机器人三维力柔性触觉传感器的设计[J].传感技术学报,2008,21(10):1695-1699.
[6] 付朝阳.导电橡胶力敏传感器研究进展[J].传感器与微系统,2013,32(6):1-4.
[7] Stassi S,Cauda,V,Canavese G,et al.Flexible tactile sensing based on piezoresistive composites[J].A Review Sensors,2014,14:5296-5332.
[8] Takashima S,Horie T,Mukai K,et al.Piezoelectric properties of vinylidene fluoride oligomer for use in medical tactile sensor applications[J].Sensors and Actuators A:Physical,2008,144(1):90-96.
[9] De Maria G,Natale C,Pirozzi S.Force/tactile sensor for robotic applications[J].Sensors and Actuators A:Physics,2012,175:60-72.
[10] Assaf T,Roke C,Rossiter J,et al.Seeing by touch:Evaluation of a soft biologically-inspired artificial fingertip in real-time active touch[J].Sensors,2014,14:2561-2577.
[11] 张景柱,郭 凯,徐 诚.六维力传感器静态解耦算法应用研究[J].传感器与微系统,2007,26(12):58-59.
[12] 许德成,高永慧,郭小辉.一种全柔性电容式触觉传感器设计与试验[J].江苏大学学报:自然科学版,2015,36(3):
337-342.
[13] 王东升,秦 岚.导电橡胶触觉传感器阵列的标定实验研究[J].传感器与微系统,2008,27(12):21-23.
