飞秒激光标定X射线条纹相机的时间特性
2018-03-23宗方轲周军兰杨勤劳郭宝平
顾 礼,宗方轲,李 翔,周军兰,杨勤劳,郭宝平
(1.深圳大学光电工程学院,光电子器件与系统教育部/广东省重点实验室,广东 深圳 518060;2.深圳大学信息工程学院,广东 深圳 518060;3.深圳大学光电中心,广东 深圳 518060;4.深圳大学高等研究院,广东 深圳 518060)
1 引 言
激光惯性约束聚变(inertial confinement fusion,ICF)是获取氢核聚变信息的重要来源。利用高功率激光器作为驱动源,照射高原子序数元素制成的靶腔,腔壁产生X射线辐射,加热氘氚靶丸表面,靶丸球壳向靶心压缩,达到高温高密度的点火条件,靶丸发生内爆。整个内爆过程持续数纳秒,通过测量内爆辐射的X射线变化,可以获取ICF的基本信息和特征参数[1-2]。X射线条纹相机是ICF中记录内爆辐射X射线的重要诊断仪器[3-5],研究其时间特性是实现诊断的前提。随着我国ICF研究中激光器数目和功率的增大[6-7],每次打靶试验的成本也在上升,X射线条纹相机作为诊断工具,需要提供精确的固有延时、时间量程和小的时间晃动[8-9]。X射线条纹相机的时间特性受到光电效应的量子涨落以及电路固有特性影响[10],因此,其时间特性需要严格标定。
本文为我国神光Ⅲ研制了一台工程化X射线条纹相机,利用钛宝石飞秒激光器组建了条纹相机动态性能测试系统,标定了相机的时间特性,测量出相机较为精确的固有延时、时间量程和时间晃动。实验结果还显示相机具有的四个时间量程,跨度一个数量级,可以实现不同超快信号的诊断。
2 相机研制
X射线条纹相机对超快的X射线脉冲诊断的过程,是由光电子作为载体,将脉冲的时间信息线性地映射为荧光屏上的空间信息。具体成像过程为:X射线脉冲辐射在条纹相机光电阴极上,发生光电效应转换为光电子,X射线脉冲包含的时间、强度分布等信息线性传递给电子脉冲。电子在静电场形成的聚焦透镜中被加速和会聚。偏转板上加有线性随时间变化的扫描电压,板内形成线性随时间变化的偏转电场,不同时刻进入偏转场的电子受到大小不同的偏转力,电子被扫描偏转后轰击荧光屏,经电光转换变为可见光。
除了具有传统X射线条纹相机的功能和主要部件,为了实现神光Ⅲ公共诊断平台的集中化和便于维护[11],诊断系统工程化的X射线条纹相机系统还具有模块化、功能化和远程控制的特点。如图1所示,相机气室内部具有:条纹变像管、像增强器、CCD、同步触发及扫描控制系统,高压供电系统,内嵌式计算机控制系统。气室外部具有气密性接插口:电源输入、4路光纤接口、1路SMA电触发、冷却水进出口、冷空气进出口。相机气室内部还分布有压力、温度、湿度、冷却水流量、浸水警报等传感器,通过远程计算机实时监控相机环境参数和工作状态。通过内外计算机通信,还可以远程操控相机三种工作模式(静态、低偏、动态)切换、扫速切换、延迟时间设定、增益设定。相机还具有联动互锁、超限报警、超限强制关机的自保护功能。
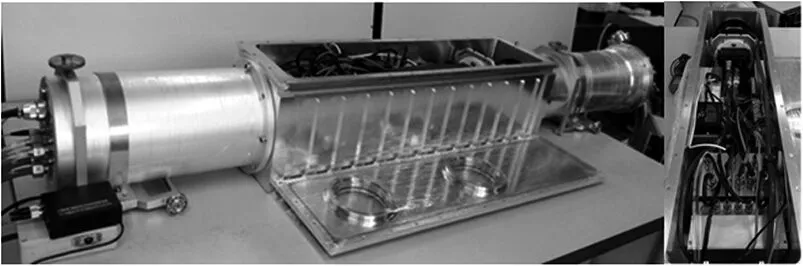
图1 工程化X射线条纹相机
3 动态测试方法
X射线条纹相机动态性能测试方法如图2所示,钛宝石飞秒激光器脉冲有两束,其中一束光波长为800 nm被送往PIN光电探测器,转换成电脉冲触发信号,电信号经过时间延迟电路适当延迟后用于触发扫描电路工作。另一束光波长为266 nm,脉冲时间宽度为130 fs,经过M1、M2紫外反射镜反射延迟后被送往法布里-珀罗(F-P)标准具,紫外光经过M3和M4中若干次反射和出射后形成一系列标准时间间隔Δt的光脉冲序列,光电转换为电子被条纹相机内扫描电路同步并偏转后完成时间、空间信息映射。荧光屏上的光信号被MCP像增强器增强,通过光锥耦合进CCD转换成计算机可以处理的数字信号。通过测量和统计得到的实验图像,可以标定出条纹相机的性能参数。
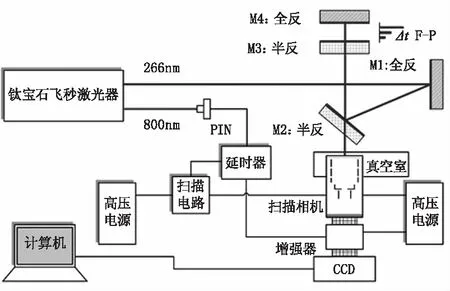
图2 条纹相机静态测试原理图
图3为条纹相机动态测试的实验装置,其中使用了Quantronix130 fs激光器,Princeton Instruments 2048 F科学级制冷CCD,2048×2048 pixel,像素尺寸13.5 μm×13.5 μm。

图3 动态测试实验装置
4 时间特性
4.1固有延时
固有延时是条纹相机中电路等部件固有的时间响应迟滞。条纹相机固有延时测量精确,光路信号和电路信号才能同步在偏转板上获得待测光脉冲信号,靶场测试时才能获取到X射线脉冲信号[12]。固有延时测试以第一挡为例,获取的脉冲序列的第一个脉冲在图像中间时,记录光路和电路的实验条件。图2中光路端:空气中光路长度为17.8 m;空气中光延时为3.33 ns/m;光电子在变像管中渡越时间约为4 ns,电路端:PIN距800 nm红外光出口0.3 m;电信号在同轴电缆中延时为5 ns/m;相机延时器可变延时为32 ns。飞秒激光器红外光比三倍频的紫外光提前30 ns。光和电信号同步到偏转板时,光信号延时为:
To=ta+te=17.8m×3.33 ns/m+4 ns
=63.3 ns
(1)
电信号延时为:

(2)
条纹相机第一挡的固有延时为:
ΔT1=To-Te=63.3 ns+30 ns-67 ns
=26.3 ns
(3)
同样方法通过调节可变延时器,使其他挡位图像同步于图像中间,由光信号和电信号的延时差,可计算出其余三挡固有延时为31.5 ns、41.2 ns、68.6 ns。
4.2 时间量程
时间量程是条纹相机可以测量脉冲的最大持续时间。条纹相机工作在动态模式,分别置于所设计的第一到四挡,测试扫描速度和全屏时间量程。激光序列在四个挡位下测试结果如图4所示。第一挡的标准距长度为35 mm,光程差为70 mm,F-P标准距所产生的光脉冲序列标准时间间隔为233 ps,测量出CCD上条纹的平均像素间距,统计多幅图像,得到脉冲平均间隔为252.3 pixel,从而计算得到扫描速度为1.09 pixel/ps,如式(4),由CCD像素总数2048 pixel可计算得时间量程为1.9 ns,如式(5)。

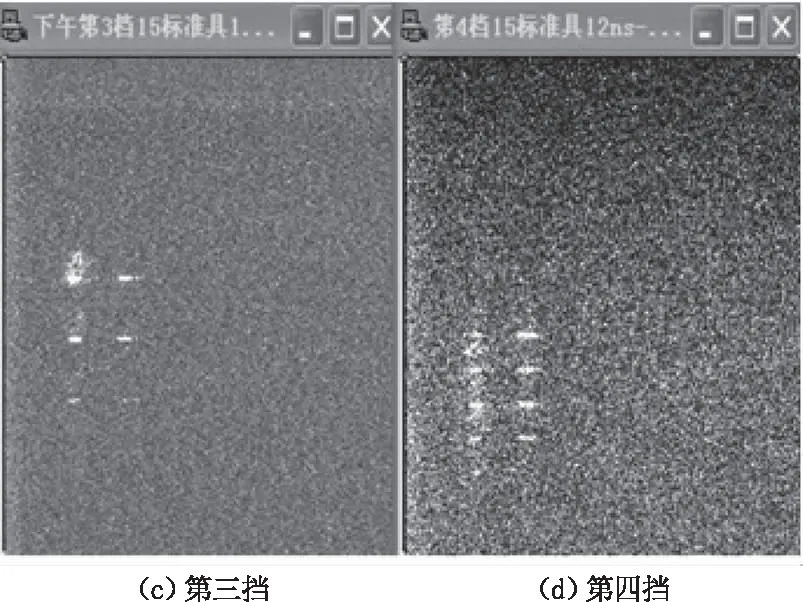
图4 条纹相机时间量程测试

=1.09pixel/ps
(4)
τ1=Pnum/v1=2048pixel/1.09pixel/ps=1.9ns
(5)
同样方法可以测出其余三挡扫描速度和时间量程,测试数据如表1。表中可以看出,相机四个挡位的时间量程为1.9 ns、3.9 ns、7.9 ns、14.5 ns。时间量程跨度近一个量级,并接近2倍关系增加,可以满足不同超快脉冲的时间测量。

表1 条纹相机扫描速度测试数据
4.3 时间晃动
时间晃动是条纹相机工作在扫描模式下,获取信号时间偏移的统计标准差,它反映了相机获取信号的时间稳定性。时间晃动性能受条纹相机内光电、电光转换的量子涨落以及触发信号幅度的涨落等影响。相机预热后,当触发输入信号幅度涨落较小时,试触发获取信号正常,读取11幅扫描图像。以其中第一幅扫描图像的第一个脉冲为参考零点,然后分别测量每一幅扫描图像相对于参考零点的时间偏移。相机工作在第一(最快)挡,获取激光脉冲序列如图5所示。条纹图像从上往下为时间轴,记录激光脉冲随时间的变化,以左图中的第一个脉冲为时间零点,右图第一脉冲与其相差16 pixel。由表1中第一挡扫描速度为1.09 pixel/ps,可得出右图脉冲比左图提前了14.8 ps,计算方法如式(6)。同样方法可以测出其余图像的时间偏移。

图5 条纹相机时间晃动测试
t1=Δy1/v1=(337-353)pixel/1.09pixel/ps=-14.8ps
(6)
统计10个时间偏移值的标准差,得相机系统的时间晃动为:
(7)
5 结 论
本文为我国神光Ⅲ研制一台工程化X射线条纹相机,该相机具有模块化、功能化和远程控制的特点。使用飞秒激光平台组建了动态测试系统,标定了相机的时间特性。较为精确地测量了X射线条纹相机时间晃动为13.7 ps,四个挡位的固有延时为26.3 ns、31.5 ns、41.2 ns、68.6 ns,全屏时间为1.9 ns、3.9 ns、7.9 ns、14.5 ns。实验结果还显示相机四个时间量程的跨度达一个数量级,近似2倍关系增加,方便实现不同超快信号的对比测量和诊断。该相机时间性能优良,可以满足目前我国激光聚变诊断研究对X射线条纹相机的需求。
[1] Town R P,Bradley D K,Kritcher A,et al.Dynamic symmetry of indirectly driven inertial confinement fusion capsules on the National Ignition Facility[J].Physics of Plasmas,2014,21(5):056313.
[2] Glenzer S H,Macgowan B J,Meezan N B,et al.Demonstration of ignition radiation temperatures in indirect-drive inertial confinement fusion hohlraums[J].Physical Review Letters,2011,106(8):085004.
[3] Benstead J,Moore A S,Ahmed M F,et al.A new streaked soft x-ray imager for the National Ignition Facility[J].Review of Scientific Instruments,2016,87(5):055110.
[4] Zuber C,Bazzoli S,Brunel P,et al.Picosecond X-ray streak camera dynamic range measurement[J].Review of Scientific Instruments,2016,87(9):093501.
[5] GU Li,ZONG Fangke,LI Xiang,et al.I Designment of a femtosecond streak camera with a novel accelerating structure[J].Acta Optica Sinica,2015,35(11):1134001.(in Chinese)
顾礼,宗方轲,李翔,等.一种新型加速结构飞秒条纹相机的设计[J].光学学报,2015,35(11):1134001.
[6] ZHANG Bo,PENG Zhitao,LV Jiakun,et al.Multi-beams time-synchronization measurement for intertial confinement fusion laser facility[J].Chinese Journal of Lasers,2016,43(2):0208003.(in Chinese)
张波,彭志涛,吕嘉坤,等.惯性约束核聚变激光驱动器多路光束时间同步测试方法[J].中国激光,2016,43(2):0208003.
[7] CHEN Jia,CUI Xinqiang,GUO Xiangchao,et al.Research on the transmittance of high power pulse xenon lamp[J].Laser & Infrared,2016,46(8):958-962.(in Chinese)
陈佳,崔新强,郭向朝,等.大功率脉冲氙灯灯管透过率的研究[J].激光与红外,2016,46(8):958-962.
[8] YU Zheng,DENG Keli,LI Jin,et al.Diagnostic equipment calibration platform based on Sub-picosecond ultraviolet laser[J].Acta Optica Sinica,2017,37(6):0614002.(in Chinese)
袁铮,邓克立,李晋,等.基于亚皮秒紫外激光器的诊断设备标定平台[J].光学学报,2017,37(6):0614002.
[9] HUI Dandan,TIAN Jinshou,LU Yu,et al.Temporal distortion analysis of the streak tube[J].Acta Physica Sinica,2016,65(15):260-266.(in Chinese)
惠丹丹,田进寿,卢裕,等.条纹变像管时间畸变的分析[J].物理学报,2016,65(15):260-266.
[10] GU Li,ZONG Fangke,LI Xiang,et al.Influence of photoelectron energy and angular distribution and space charge effect on streak cameras[J].High power Laser and Particle Beams,2015,27(6):27062011.(in Chinese)
顾礼,宗方轲,李翔,等.光电子能量角度分布和空间电荷效应对变像管条纹相机的影响[J].强激光与粒子束,2015,27(6):27062011.
[11] LIAO Hua,YANG Qinlao.Novel X-ray streak camera with large dynamic range dedicated to initial confinement fusion facility[J].Chinese Journal of Vacuum Science & Technology,2015,35(2):250-254.(in Chinese)
廖华,杨勤劳.神光Ⅲ主机大动态范围X射线扫描相机研制[J].真空科学与技术学报,2015,35(2):250-254.
[12] GU Li,HU Xin,YANG Qinlao,et al.Study of mutli-range X-ray streak camera[J].Journal of Shenzhen University:Science & Engineering,2011,28(3):225-229.(in Chinese)
顾礼,胡昕,杨勤劳,等.多量程X射线条纹相机研制[J].深圳大学学报:理工版,2011,28(3):225-229.
