变拓扑3⁃RSR多面体对接机构的设计与研究
2018-03-22姚燕安何妍颖
刘 洋,姚燕安,何妍颖
(北京交通大学机械与电子控制工程学院,北京100044)
1 引言
上世纪美国使用航天飞机对Solar Maximum Mission卫星实时在轨对接和修复,是人类历史上第一次使用航天飞机在轨对接、维修空间航天器[1]。美国宇航局NASA已开展和计划开展的在轨服务项目有“自主交会技术验证卫星”、“试验卫星服务系统”、“轨道快车”、“微小卫星技术试验”、“前端机器人使能近期演示验证”、“凤凰”等[2]。在自主在轨服务发展方面,目前已经突破关键技术,其中以“轨道快车”计划为主要代表[3]。美国密歇根宇航公司开发的AS⁃DS⁃II卫星装置,通过软轴进行目标的预对接,然后收缩软轴将被动组件拉近并通过三个自动对齐加载栓实现轴线与面的自动对齐,同时在硬探头预加载凸轮和止动扣的联合作用下实现两面的刚性连接[4⁃5]。 该机构已在 KC⁃135 飞机上成功进行了飞行试验[6]。
我国的航天器在轨服务技术目前处于起步阶段,尽管已有一定工程实践经验,但理论层面相对匮乏,尚未形成广泛认可的概念和技术体系[7]。
传统对接机构通常以串联机械手形式出现,随着近年来并联机构的发展,越来越多并联机构投入工程实践应用,并联机构具有刚度大、结构稳定、载荷重量比高、误差小、精度高、容易实现高速运动、方便控制等优点[8⁃9]。
基于并联机构的思想,本文针对航天器对接功能服务的需求,提出一种面向空间服务的变拓扑多面体对接机构新概念,用于执行与目标航天器、太空垃圾或小行星等空间目标的对接任务。变拓扑多面体对接机构,具有大变形能力的特点,可以采用多种方式高效对接空间目标。空间目标被对接后,变拓扑多面体对接机构可以通过自身变形调整追踪航天器与空间目标的相对位置,为进一步的精确连接做好准备。本文通过对比传统的对接机构介绍变拓扑多面体机构的优势;进行构型设计与运动学分析;并完成虚拟样机与原理样机的试验验证。
2 变拓扑多面体对接机构应用特点
2.1 变拓扑多面体对接机构的优势
传统的对接机构通常以单臂操作形式出现,单臂在安装火箭上占用了一部分空间,这样就给设计者带来了一定的不便,当采用多面体对接机构时,则可以利用大变形的能力,极大地节省了空间,提高了空间利用率,如图1所示。
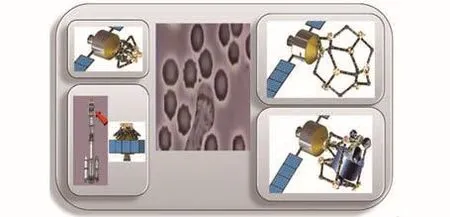
图1 多面体对接机构的大变形量Fig.1 Large deformation of polyhedron docking mechanism
传统对接机构主要通过点对接形式来完成对接过程,多面体对接机构则通过自身大范围变形的过程对目标进行包络从而完成对接,如图2所示。多面体对接机构大大减小了对接过程的难度,保证对接过程的顺利完成。
在稳定控制技术方面,传统的单臂操作由于采用串联形式会存在误差积累现象,同时由于受力原因,也使对接过程的精度下降。但采用多臂并联操作,则充分利用了并联机构的优势,在精度、刚度等发面都得到了提升,如图3所示。
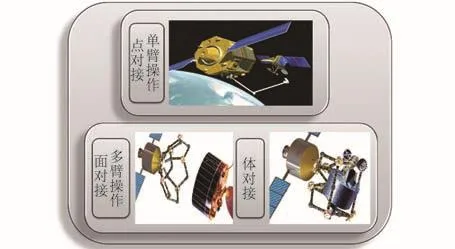
图2 多面体对接机构的对接形式Fig.2 Docking methods of polyhedron docking mech⁃anism

图3 多面体对接机构的稳定控制Fig.3 Stability Control of Polyhedron Docking Mechanism
2.2 对接方式
变拓扑多面体对接机构的大变形能力,使其可以针对不同尺寸、不同形状的空间目标实施对接,其对接方式就像白细胞吞噬细菌,如图4所示[10]。相比传统航天器交会方式,吞噬式对接方式使得追踪飞行器不需要与空间目标进行精确对准,可以快速高效地对目标实施对接。相比捕捉网、鱼叉等新型对接方式,变拓扑多面体对接机构通过多点夹持控制空间目标,通过控制对接机构自身变形调整目标卫星与追踪卫星的相对位置,进一步实现两者精确。
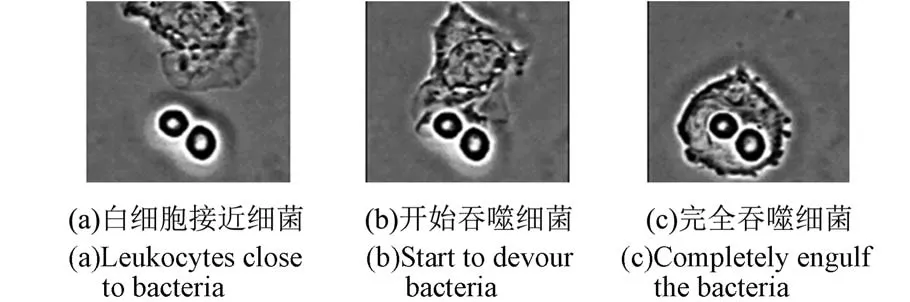
图4 白细胞吞噬细菌过程[10]Fig.4 Process of bacteria phagocytosis by leukocyte[10]
吞噬式对接方式分为吸入式对接与夹持式对接。吸入式对接首先利用Bricard机构运动时的翻转特性,将目标推送至对接机构所形成的机械网内部,以防止碰触目标时将其推离对接区域;其次,借助Bricard机构运动时的缩放特性将网口封住,以防止目标的逃脱;另外,Bricard机构收缩时,三组外支杆件配合三条支链的收缩亦可有效地对目标进行固定与控制。夹持式对接利用Bri⁃card机构运动时的缩放特性将并联机构末端变为一个可夹持目标的机械手,Bricard机构收缩将目标夹持后,3RSR并联机构可继续对目标进行如姿态调整等操作。
3 对接机构构型设计与运动学分析
3.1 变拓扑多面体对接机构的构型设计
根据多面体杆式变形机构的构型机理构造的变拓扑多面体对接机构如图5所示,呈四面体网状,由3RSR并联操作机构和Bricard缩放变形机构组成。3RSR并联操作机构具有三个自由度,由三条支链组成,每个支链上依次为转动副、球副、转动副,通过三支联的运动可实现末端网口(即Bricard缩放变形机构)的姿态与位置控制。变拓扑多面体对接机构通过连接模块搭载在搭载卫星上。

图5 变拓扑多面体对接机构设计方案Fig.5 Design scheme of variable topology polyhed⁃ron docking mechanism
对接目标拟定为圆柱体卫星。如图6所示,针对该类卫星进行了对接机构的结构与尺寸设计,并进一步完成了对接过程的规划。对接机构在折叠状态下高为L1,直径为L2,展开后最长距离大约为3 L1,此时直径L3略大于L2。大比例的缩放可以有效增加对接机构的工作范围。
3.2 对接机构的自由度分析与运动学分析
将Bricard机构分别简化为3⁃RSR并联机构的定平台和动平台,如图7所示。

图6 变拓扑多面体对接机构设计示意图Fig.6 Design scheme of variable topology polyhed⁃ron docking mechanism

图7 对接机构示意图Fig.7 Diagram of docking mechanism
3⁃RSR 机构为非过约束机构[11⁃12],采用公式(1)计算自由度:

式中,M表示机构的自由度;n表示包括机架的构件数目;g表示运动副数目;fi表示第i个运动副的自由度;v表示并联冗余约束;ξ表示局部自由度。带入数据为:= 15,ν= 0,ξ= 0,求得 M =6(8-9-1) +15+0+0=3。
Bricard缩放变形机构具有一个自由度[13],作为可缩放的网口布置于3RSR并联操作机构的末端。变拓扑多面体对接机构整体在机构学上具有四个自由度,在工程实现上,为平衡机械运动,Bricard缩放变形机构上布置三个驱动电机,即整机具有六个驱动电机。进行工作空间求解如下:


由此可得对接机构末端中心点的运动范围,如图 8(a)所示,图 8(b)、(c)、(d)分别为对接机构末端中心点的运动范围在xy、xz和yz平面的投影。由此可得到倾角范围,即对接容差为:x方向[ - 38.0673°,38.0673°],y 方向[ - 39.0299°,36.6063°]。

图8 对接机构的工作空间Fig.8 Working space of docking mechanism
4 样机试验
4.1 虚拟样机试验
利用Solidworks建模软件与Adams仿真软件对机构进行虚拟样机搭建与仿真试验。变拓扑多面体对接机构利用对接状态检测系统获取对接机构对于目标卫星的对接状态,当目标卫星不满足对接初始条件时,搭载卫星将进行对接近目标的粗调,之后对接机构将根据目标与对接要求选择相应的对接策略,以进行对接状态的细调,满足对接条件后,Bricard机构收缩变形执行对接动作,当检测目标被固定后,完成对接任务。
吸入式对接过程仿真试验如图9所示,对接机构在图(a)所示的初始位置时处于折叠待机状态,变形机构到达如图(b)所示的对接位置,并展开至如图(c)所示的对接初始姿态,经历三次对对接机构的姿态调整(图(d)~(f))后满足对接初始条件,开始进行图(g)所示的吸入式对接动作,此时目标在对接机构末端Bricard机构的翻转运动下,被推入对接机构的包络空间内,当达到对接固定所需的预紧力时完成对接任务(图(h))。

图9 吸入式对接过程仿真试验Fig.9 Simulation of suction⁃type docking process
夹持式对接过程仿真试验如图10所示,变形机构从图(a)所示的初始位置到达如图(b)所示的对接位置,并展开至如图(c)所示的对接初始姿态,经历对接机构的姿态调整(图(d))后满足对接初始条件,开始进行如图(e)所示的夹持式对接动作,此时目标在对接机构末端Bricard机构的收缩运动下,在对接机构的包络空间内被夹持固定,当达到对接固定所需的预紧力时完成对接任务,如图(f)所示。

图10 夹持式对接过程仿真试验Fig.10 Simulation of clamping⁃type docking process
仿真试验表明:1)吸入式对接较于夹持式对接,固定式更加牢固,更适用于对接目标;2)吸入式对接较于夹持式对接,操控更为简单,目前阶段更容易实现应用;3)夹持式对接较于吸入式对接,对接距离更远,对接尺寸更大,可满足更高的对接条件要求;4)夹持式对接较于吸入式对接,对接固定后操作空间更大,更适用于开发操作功能。
如图11~14所示,通过仿真可获得驱动关节最大受力为6000 N左右,最大驱动力矩为1500 N·m,以此作为受力分析与驱动电机选择的参考依据。

图11 吸入式对接时驱动关节的受力Fig.11 Stress on driving joint in suction⁃type docking

图12 吸入式对接时驱动关节的力矩Fig.12 Torque on driving joint in suction⁃type docking

图13 夹持式对接时驱动关节的受力Fig.13 Stress on driving joint in clamping⁃type doc⁃king

图14 夹持式对接时驱动关节的力矩Fig.14 Torque on driving joint in clamping⁃type doc⁃king
4.2 原理样机试验
为对文章中所设计对接机构进行进一步验证,设计原理样机。原理样机初始状态下为节省空间,自身处于半折叠状态,如图15所示。
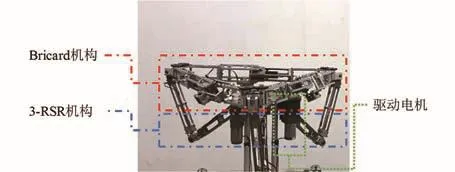
图15 原理样机Fig.15 Prototype
为验证多面体对接机构具有大变形能力,我们对原理样机进行了折展试验,如图16所示。首先进行了机构可折展的最小空间的试验,如图(a)所示,将机构进行部分折展试验,如图(b)、(c)所示,为验证机构的最大折展空间,进行了最大化的折展试验,如图(d)所示。

图16 对接机构折展实验Fig.16 Folding and unfolding experiment of docking mehanism
为验证多面体对接机构的位姿调整能力,对原理样机进行调整姿态验证,如图17所示。先使机构达到一般位置下,并锁住电机,如图(a)所示,验证机构的可扭转性能,如图(b)、(c)、(d)所示。
图18为对接机构对接过程,当所需对接目标出现后,对接机构做好对接准备,如图(a)所示,同时开始调整自身姿态,寻找合适的姿态来完成对目标的对接工作,如图(b)所示,完成对接过程后,对接机构在保证目标不发生脱离现象的前提下,进行自身姿态的调节,以提高空间利用率,如图(c)、(d)所示。

图17 对接机构调整姿态Fig.17 Attitude adjustment of docking mehanism

图18 对接机构对接过程Fig.18 Docking process of the docking mechanism
5 结论
基于互相自由度解耦的3⁃RSR并联机构与Bricard机构,提出具有4自由度的变拓扑多面体对接机构。利用三自由度的3⁃RSR并联机构可对对接机构与夹持住的对接目标进行姿态调整;利用单自由度的Bricard机构可使对接机构整体进行折叠与展开,并对目标物进行吸入式与夹持式的对接。
(
)
[1] 崔乃刚,王平,郭继峰,等.空间在轨服务技术发展综述[J]. 宇航学报,2007, 28(4):805⁃811.Cui N G,Wang P, Guo J F, et al.A review of on⁃orbit servi⁃cing[J].Journal of Aeronautics, 2007, 28(4): 805⁃811.(in Chinese)
[2] 王晓海.空间在轨服务技术及发展现状与趋势[J].卫星与网络, 2016(3): 70⁃76.Wang X H.Development and trend of space on⁃orbit servicing technology[J].Satellite and Network, 2016(3): 70⁃76.(in Chinese)
[3] 林来兴.美国“轨道快车”计划中的自主空间交会技术[J]. 国际太空, 2005(2): 23⁃27.Lin L X.Success of the space shuttle and the space station rendezvous and docking[J].Space International, 2005(2):23⁃27.(in Chinese)
[4] Hays A B,Tchoryk P,Pavlich J C.Dynamic simulation and validation of a satellite docking system[J].SPIE, 2003,5088:77⁃78.
[5] Hays A B,Pavlich J C.Advancements in design of an autono⁃mous satellite docking system[J].SPIE, 2004, 5419: 107⁃118.
[6] Rivera D E,Hays A B.Modeling and simulation of the Mich⁃igan aerospace autonomous satellite docking system II[ J].SPIE, 2005, 5799: 82⁃91.
[7] 李强.新型类锥杆式对接机构的碰撞过程分析[D].长沙:国防科学技术大学,2009.Li Q.Collision Analysis of a New Quasi Probe⁃cone Docking Mechanism[D].Changsha: National University of Defense Technology,2009.(in Chinese)
[8] 温兆麟,陈新,敖银辉,等.并联机构应用的领域及其构型研究[J]. 机床与液压, 2005(5):6⁃9.Wen Z L, Chen X, Ao Y H,et al.Application area and structure study of parallel mechanism[J].Machine Tool and Hydraulics, 2005(5): 6⁃9.(in Chinese)
[9] 高洪,赵韩.并联机器人机构学理论研究综述[J].安徽工程科技学院学报(自然科学版), 2006, 21(1): 73⁃79.Gao H, Zhao H.A review about theory of mechanism for par⁃allel robotics[J].Journal of Anhui University of Technology and Science, 2006, 21(1): 73⁃79.(in Chinese)
[10] 热巢.32张惊险的 GIF图,看了瞬间对科学上瘾[EB/OL].http://www.rechao.com/xiaoxuan/,2017⁃11⁃29.Re Chao.32 breathtaking gifs,watching the instant science addiction [ EB/OL].http://www.rechao.com/xiaoxuan/,2017⁃11⁃29.(in Chinese)
[11] Richard B F.Tensile⁃integrity structures: U.S.Patent 3,063,521[P].1962⁃11⁃13.
[12] Hoberman.Transformation design[N/OL]. (2014)[2017].http://www.hoberman.com/home.html.
[13] 高健,吴洪涛.某一特殊普通面对称Bricard机构及其分析[J]. 应用科技, 2011, 38(1):54⁃58.Gao J, Wu H T.One special type of the general plane⁃sym⁃metric Bricard linkages and its analysis[J].Applied Science and Technology, 2011, 38(1): 54⁃58.(in Chinese)