新型纵向微位移补偿控制系统的研制
2018-03-21张成闫艳燕张琳
张成, 闫艳燕, 张琳
(河南理工大学机械与动力工程学院,河南焦作 454000)
0 引言
近年来伴随着电子技术、宇航、生物工程等学科的发展,图像识别技术的应用领域也越来越广泛,尤其是在微位移领域得到广泛应用[1-3]。然而,在微位移领域中微位移补偿方法越来越多,目前微位移补偿方法主要有利用光栅位移传感器的方法,利用激光干涉仪的方法及利用图像识别的方法。考虑到光栅位移传感器对环境要求较高和激光干涉仪的结构庞大,价格昂贵等问题[4-5],本文基于图像识别的方法,结合电子显微镜的拍摄和S-EYE软件的标记,搭建了微位移补偿的检测装置,通过TC5520V可编程运动控制器对机构移动数值转换脉冲数值,构成纵向微位移补偿的闭环控制系统,实现了新型纵向微位移平台的纵向微量进给,改善了机械传动式微位移机构精度。
1 基于图像识别的检测
1.1 纵向位移机构位移标记图像的实现
首先将显微镜的镜头对准微位移机构,进行粗调和微调,直到上位机界面上图片显示比较清晰为止,电子显微镜拍摄图如图1所示。然后驱动伺服电动机带动滚珠丝杠运动,与此同时,运用S-EYE软件对纵向微位移机构的两次运动分别做个标记,最后用显微镜将其运动位置拍摄下来,显微镜的放大倍数能够达到100倍,纵向微位移机构的位移标记图像如图2所示。
1.2 图像识别对标记图像的处理
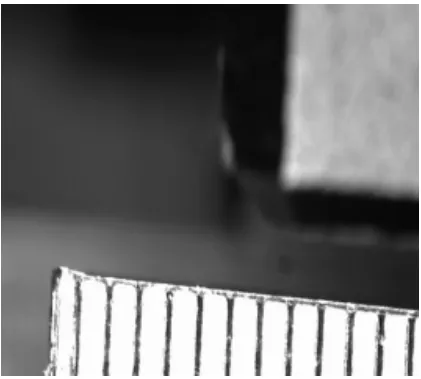
图1 电子显微镜拍摄图
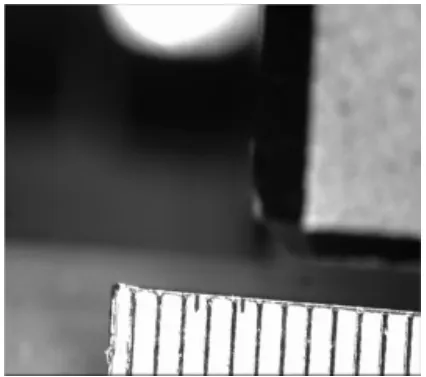
图2 纵向微位移机构的位移标记图像
标记图像中值滤波是为了利用非线性信号处理技术对图像中的噪声进行有效抑制,其实验原理是把数字图像或数字序列中一点的值用该点的一个领域中各点值的中值代替,从而消除孤立的噪声点。标记图像中值滤波效果能够满足对标记图识别效果,同时能够有效地提取图像中的特征和位置信息,中值滤波去噪如图3所示。
图像分割就是将图像中我们感兴趣的目标与其背景分离,并把图像中具有不同意义的目标提取出来。基于颜色的图像分割方法与其他的分割方法相比,该方法实现起来更简单,算法更简洁,具有更好的实时性[7-10]。颜色分割方法能用颜色空间转换来分割图像,可以综合利用图像特征,得到较好的处理结果,颜色二值分割如图4所示。
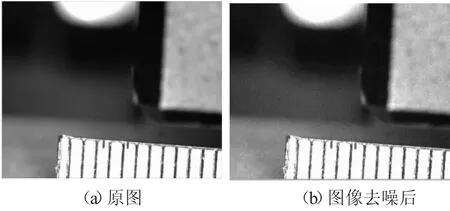
图3 中值滤波的去噪
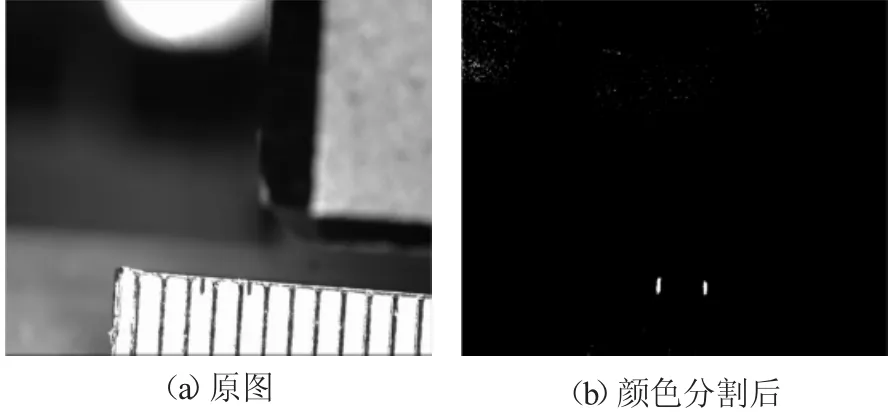
图4 颜色二值分割
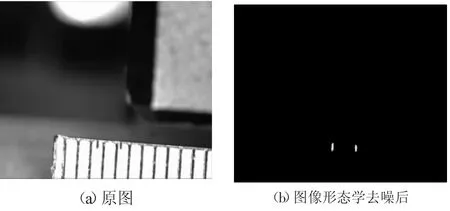
图5 形态学去噪
数学形态学是用具有一定形态的机构元素去度量和提取图像中的对应形状,以达到对图像分析和识别的目的[11]。目前,这门学科在医学图像处理、工业检测、材料科学和机器人视觉等方面都有成功应用,具有良好的应用和发展前景[12]。标记图像进行形态学处理的目的就是去除多余的小对象,仅仅保留最大面积的两个对象,形态学去噪如图5所示。
通过利用数学形态学处理的方法,对提取出的图像元素进行处理,去除无用元素后得到红色标记两点的距离值,定位目标示意图如图6所示。
2 纵向微位移机构的控制系统
本微位移机构控制系统的组成包括:台达ECMAC20604RS型交流伺服电动机、ASD-B2-0421-B型驱动器、PC机、电子显微镜、微位移机构及TC5520V可编程运动控制器。且ASD-B2-0421-B型驱动器可以提供位置、速度、转矩三种基本控制模式[13-15],为了实现该微位移机构能在超精密车床上实现水平运动的补偿和纵向的微量进给,本微位移机构采用了位置控制模式。且位置控制模式被应用于精密定位的场合,具有方向性的命令脉冲输入可经由外界来的脉冲来操纵电动机的转动角度,实现了对微位移机构的精密位置定位的特点,纵向微位移机构位置控制系统的结构如图7所示。
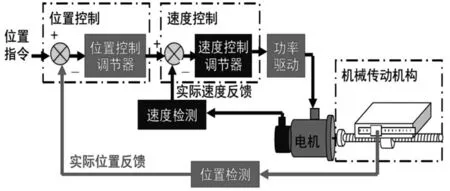
图7 纵向微位移机构位置控制系统的结构图
2.1 位置控制参数设置
ADSA-Soft是一款功能比较强大、操作起来比较方便以及能够对伺服电动机实施全方位控制的软件,具有控制精度高和误差小等优点。通过ADSA-Soft软件对伺服驱动器进行参数设置,以达到微位移机构水平方向的补偿和纵向的微进给。驱动器参数调整如图8所示。
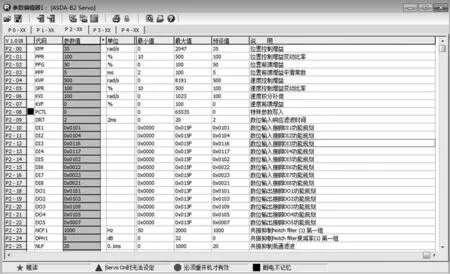
图8 驱动器参数调整图
具体参数设置如下:1)控制模式的选择,当P1-01设置为00时,微位移控制系统进入了位置控制模式;2)脉冲形式的选择,当P1-00的值为0x2时,伺服驱动器进入了脉冲+方向控制方式;3)电子齿轮比的设定,当P1-44为16,P1-45为10时,伺服电动机每接受100 000个脉冲能够转一圈,此时微位移机构移动10 mm,且每接受一个脉冲微位移机构就移动1 μm;4)位置回路增益调整,当P2-32值设定为0,P2-00的值设置为35,P2-02值设定为50时,微位移机构控制系统将进行位置环增益调整,直到脉冲指令位置与反馈的实际位置的差值等于零为止。
2.2 TC5520V可编程运动控制器的位置控制
根据对伺服驱动器参数调整,当伺服驱动器P1-00的值为0x2时,伺服驱动器进入了脉冲+方向控制方式。此时,TC5520V可编程运动控制器就可以将运用图像识别的方法测得的微位移机构的移动数值转换成脉冲数输入到伺服驱动器中,进而对纵向微位移机构进行位置控制。将TC5520V可编程运动控制器的X轴控制沿一定坡度向上运动的电动机,Y轴控制水平方向运动的电动机,此时,给TC5520V可编程运动控制器输入经图像识别处理后的移动数值L为7.1839 μm,根据楔形机构的直角关系可得,沿一定坡度向上运动的水平方向分量的运动距离x1为7.1174 μm。在闭环控制系统中,通过实际值与期望值之间的差值进行反馈,最终得到Y轴控制的水平方向移动量x2为-7.1174 μm,运动控制器可将L,x1值转换成脉冲数P0=71.839,P1=71.174。再根据电子齿轮比可以得出输入到伺服驱动器的X轴脉冲数为114.942,Y轴脉冲数为113.878,伺服电动机就能接受一定比例的脉冲数驱动滚珠丝杠机构传动。考虑到纵向微位移平台系统的各种运动误差等情况,通过对纵向微位移平台闭环控制系统的调节,可使纵向微位移平台纵向微进给量能达到1 μm。
3 结 论
通过采用图像识别的检测方法,本文所研制的新型纵向微位移控制系统实现了水平方向的补偿运动,提高了机构纵向微进给精度;与目前光栅位移传感器和激光干涉仪的检测方法相比,该检测方法具有价格便宜、使用方便、测量环境要求较低等特点;此外,基于图像识别的方法,通过TC5520V可编程运动控制器建立了闭环控制系统,得出了当P0=71.839,P1=71.174时,纵向微位移平台可以实现水平方向上的自动补偿,纵向微进给可达到1 μm;由此可知,基于图像识别的新型纵向微位移补偿控制系统大大提高了纵向微位移进给精度(可达1 μm),改善了机械传动式微位移机构精度。
[1] 李圣怡,黄长征,王贵林.微位移机构研究[J].航空精密制造技术,2000,36(4):5-9.
[2] 汪晨,张涛,林为民,等.图像识别综述及在电力信息安全中的应用研究[J].计算机技术与发展,2012,22(4):161-164.
[3] 丰晓霞.基于深度学习的图像识别算法研究[D].太原:太原理工大学,2015.
[4] 朱珠.压电陶瓷驱动器特性研究与二维微纳定位平台结构设计[D].杭州:浙江大学,2011.
[5] 李森.压电陶瓷微位移驱动器输出特性的研究[D].合肥:合肥工业大学,2007.
[6] 黄长专,王彪,杨忠.图像分割方法研究[J].计算机技术与发展,2009(6):76-79.
[7] 王婷婷.彩色图像分割方法的研究与实现[D].青岛:山东科技大学,2005.
[8] 孙中华.基于颜色与目标轮廓特征的视频分割方法[D].长春:吉林大学,2004.
[9] 李大瑞,王耀.基于神经网络的卫星影像与航拍实景影像自适应颜色分割方法研究[J].绿色科技,2016(6):173-178.
[10] 王润民,钱盛友,宋平,等.基于神经网络和颜色特征的车牌字符分割方法[J].计算机工程与应用,2006,42(26):57-59.
[11]杨琨,曾立波,王殿成.数学形态学腐蚀膨胀运算的快速算法[J].计算机工程与应用,2005(34):54-56.
[12] 王树文,闫成新,张天序,等.数学形态学在图像处理中的应用[J].计算机工程与应用,2004(34):89-92.
[13]黄杰.永磁同步电动机伺服驱动器的研究与设计[D].武汉:华中科技大学,2010.
[14]王军锋,唐宏.伺服电动机选型的原则和注意事项[J].装备制造技术,2009(11):129-131.
[15]徐腾.地面运动基座运动控制研究及系统结构设计[D].长春:吉林大学,2016.
