基于TLS技术的道路边坡地表位移监测研究
2018-03-20刘德贺史玉峰
刘德贺,史玉峰
0 引言
边坡安全监测是一项十分重要的工作,其中边坡表面位移监测是边坡安全监测中的重点内容。边坡表面位移监测通常采用全站仪、测量机器人、GNSS和其他监测设备测量滑坡体上监测点的位移变化[1-2]。这些方法能获得监测点的变化情况,但对整个滑坡体的变化不能准确地描述。近几年,随着TLS技术的不断发展,因其能够快速获取扫描体表面的三维坐标(点云),在许多领域得到广泛应用。如:对树木叶片曲面重建研究[3];森林地上生物量估测研究[4];古石拱桥三维点云建模[5]、三维建筑场景建模[6]研究等。在安全与形变监测方面也有许多应用研究,比如:对地铁隧道监测[7]、泥石流泥沙来源地监测[8]、高边坡危岩体进行识别[9]等。在边坡监测方面,利用TLS技术能够快速获取地形数据[10],对煤矿采空区地表进行沉降监测[11],可与传统观测相结合对大面积滑坡体进行监测和空间分析[12]等。针对道路边坡的特点,本文拟基于TLS技术分析研究边坡表面位移。通过获取边坡表面点云数据,构建边坡表面点云的DEM,分析比对不同时期DEM剖面获得边坡表面的位移情况。
1 点云数据处理与曲面重建
1.1 点云数据预处理
点云数据预处理包括点云去噪、精简和配准等。由于外界环境因素的影响,地面三维激光扫描仪获取物体表面的采样点数据时,不可避免的会存在噪声点。点云去噪处理可以去除冗杂数据,降低模型噪音点的偏差值,更好地表现真实的物体形状。点云数据采样模型如下[13]:

点云精简是以较少数量的特征点来逼近原始点云模型的过程。本文采用比例数据精简法对点云数据进行精简,其原理是在随机采样法的基础上,给需要精简的对象限定边界,利用随机函数去除点云中的随机点,直到达到预设的精简率。这样可降低原始方法的随机性,减少点云细节遗失,且可减小后续建模中生成的曲面或网格与原始数据的偏差,提高精简精度以及实际应用中的可控性。点云数据比例数据精简方法的步骤如下[5,13]:
(1)根据要求设定阈值K。
(2)搜索与某一点相关的所有三角平面片,总和为S,并选择其中任意一平面的法向量P为基准,用剩余平面的法向量Qi与P求差,得向量Wi。
(3)将所得的S-1个Wi的三维分量值取正,得出它的模并取均值

根据预设的阈值,当RK≤,删除该点;否则保留。
(4)重复步骤(2)和(3),直到处理完所有数据。
点云数据配准是将多视点点云数据统一到一个坐标系中。常用的配准方法有基于特征点的配准、ICP算法等。因本文仅用一站点云数据无需配准,故没有详细介绍配准方法。
1.2 曲面重建
曲面重建是运用相关曲面重建方法将离散点云数据重构生成连续曲面的过程。非均匀有理B样条(non-uniform rational B-spline, NURBS)方法具有稳定性好、运算速度较快,既能够表示规则曲面,也能表示自由曲线、曲面的特点,本文拟采用NURBS对点云数据进行曲面重构。NURBS曲面重构方法如下[7,14]:
(1)构建NURBS曲线。K次的NURBS曲线用一个分段有理多项式矢函数来表示,其形式如下:

式中:ωi,j为权因子;di,j为控制顶点;Ni,k(u)为K次规范B样条基函数。
(2)构建NURBS曲面。K×L次的NURBS曲面的有理多项式矢函数可以表示为:
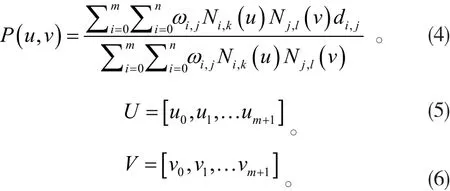
式中: di,j为控制点呈拓扑矩阵列,形成一个控制网格;ωi,j为权因子,规定四角顶点处用正权因子;Ni,k(u)和 Nj,l(v)分别为u向k次和沿ω向1次B样条基函数。公式(5)和(6)分别为U向和V向的节点矢量。
1.3 点云数据精度分析
影响激光点云精度的因素有很多,扫描距离对点云精度影响较大,扫描体表面颜色次之,表面粗糙度对点云精度的影响不明显[15-16]。为了满足监测精度要求,在边坡点云数据采集和预处理过程中,可采取相应措施来减少误差。数据采集时,尽量缩短TLS与边坡距离以便减小误差;采用一站式扫描,避免数据预处理过程中的配准误差,对多视点数据可采用精准配准;扫描时将扫描点云质量设置为“高质量”,可大大减少来自被测目标表面反射特性的误差影响。
2 试验分析
2.1 边坡点云数据采集
本文以一处道路边坡为研究对象,采用FARO Focus 3D X330地面激光扫描仪采集研究区域边坡表面点云数据,时间间隔20 d。FARO Focus 3D X330测距范围为0.6~330 m,25 m时原始数据噪声为0.3 mm,测距误差为±2 mm,满足边坡监测精度要求。仪器安置在距离边坡底约为5 m处,以确保能精确获取边坡表面点云数据,同时能够捕捉设置在周围固定(无位移)区域的5个标靶。以标靶点为基准,可将两期数据进行准叠加分析。
根据文献[19]运用最小二乘平面拟合方法对点云数据标准偏差的统计分析结果,以及作者使用FARO 3D X330在其他工程项目的研究结果,在标准测程内,该仪器获得的点云数据中误差少于2mm,满足边坡监测精度要求。
2.2 边坡点云数据预处理
对采集的原始点云数据先采取人机交互式方法进行去噪,首先删除离散较大的噪声,然后基于差值滤波去除边坡点云的孤立噪音点。运用1.1中所述比例精简法对去噪后的点云进行精简。以第一期扫描的点云数据为例,对其预处理结果如图1所示。
图1 预处理后边坡点云数据Fig.1 Slope point cloud data after pretreatment
2.3 边坡曲面重建
预处理后的研究区边坡点云数据采用1.2中NURBS相关算法进行曲面重建,重构为最终的曲面模型。为了直观反映曲面重建精度,对所得到的NURBS曲面重构模型与原始点云数据进行偏差分析,NURBS 曲面拟合精度评价问题可以转换为计算原始点云到NURBS 曲面的距离问题。实例计算中,经常会遇到较为复杂的曲面,直接求解非常困难。实际处理过程中,一般是先将曲面划分为若干简单易求平面体,分别计算各个平面点到曲面的距离,进一步分析统计这些差值。本文生成的研究区两期边坡的DEM和整体偏差分布如图2所示,偏差分析结果见表1。
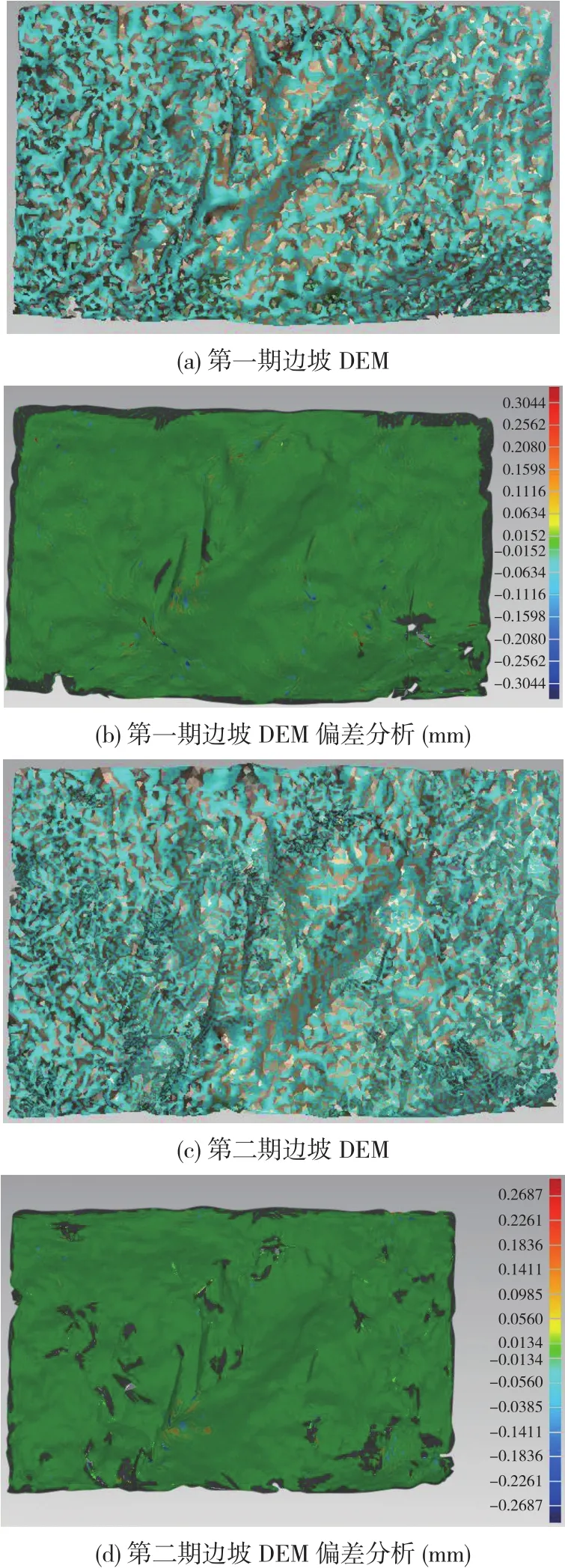
图2 重构模型和偏差分析Fig.2 Reconstruction model & Deviation analysis
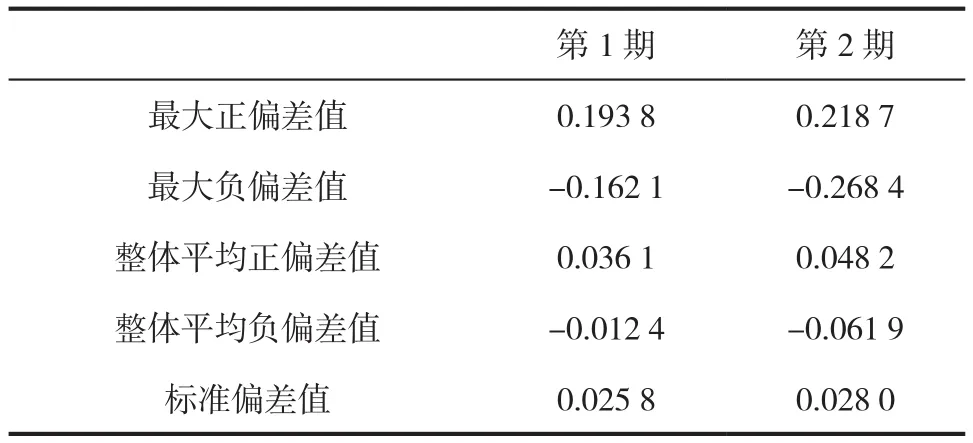
表1 偏差分析结果统计 mmTab.1 Deviation analysis results statistics
2.4 位移分析
基于点云数据的位移分析原理是将不同期的点云DEM基于公共点进行叠加[17],然后截取不同截面,分析比对两期点云模型表面的差值,以获取两期的位移情况。
本次试验采用在边坡外稳定区域的5个标靶点作为公共点,两期数据用这5个标靶点进行精确配准。等间距对叠加曲面的4个截面进行截取,提取断面后,对截取的断面进行线性拟合及形变量比对,图3为断面截取结果,图4为叠加对比结果。
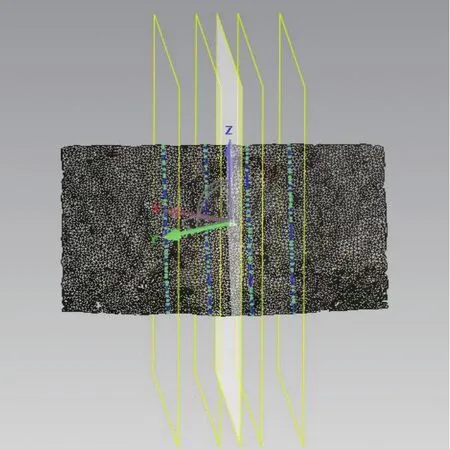
图3 叠加截面截取结果Fig.3 Overlay section cut results
从图4中可以直观地看到监测边坡的总体形变情况。对每一组截面数据等间隔求取差值,其差值的最大值、最小值以及平均值见表2。
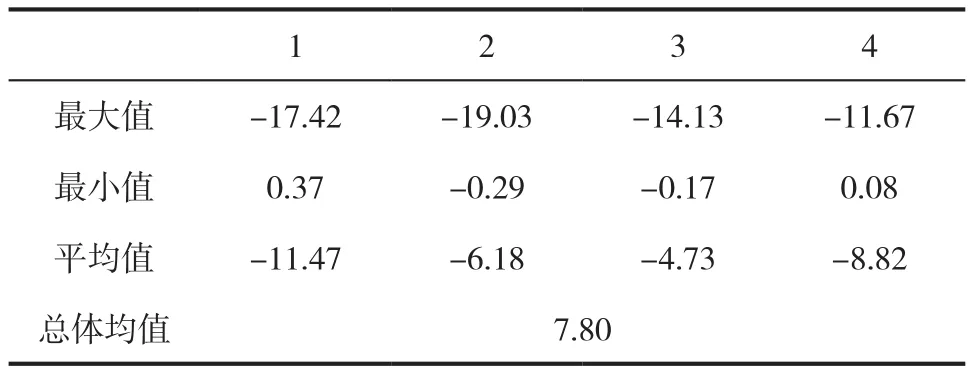
表2 差值统计 mmTab.2 Statistics of the difference
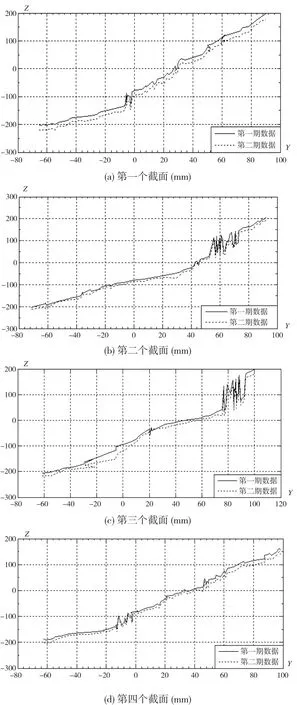
图4 叠加对比结果(mm)Fig.4 Stacking contrast results (mm)
由上述试验结果分析可得:
(1)第二期数据与第一期数据相比DEM整体呈现下降趋势,第一个截面总体下降量均值最大。
(2)总体最大下移变化量为19.03 mm,四个截面平均下降7.80 mm,每组下降均值并无异常,下降原因可能是两期间的强降雨导致的边坡表面石块或泥土滑落。
3 结束语
本文以一处林区边坡为研究对象,应用TLS分两期采集了其表面点云数据,对原始点云数据预处理后,基于NURBS曲面重建方法构建了研究区边坡点云数据的DEM,基于公共点对模型叠加,对叠加曲面进行截面截取,分析比较了边坡表面位移情况。结果表明,地面激光扫描技术可以准确、全面获取边坡表面点云,通过模型叠加分析可以得到边坡表面总体位移情况。
[1]徐茂林,张贺,李海铭,等.基于测量机器人的露天矿边坡位移监测系统[J].测绘科学,2015,40(1):38-41.
[2]吴浩,黄创,张建华,等.GNSS/GIS集成的露天矿高边坡变形监测系统研究与应用[J].武汉大学学报(信息科学版),2015,40(5):706-710.
[3]薛联凤,云挺,稽俊,等.基于激光点云数据的阔叶树叶片重建研究[J].森林工程,2015,31(1):6-11.
[4]邢艳秋,姚松涛,李梦颖,等.基于机载全波形Li-DRA数据的森林地上生物量估测算法研究[J].森林工程,2017,33(4):21-26.
[5]Riveiro B, Morer P, Arias P, et al. Terrestrial laser scanning and limit analysis of masonry arch brides[J].Construction and Building Materials, 2011, 25(4): 1726-1735.
[6]Yusuf A. An approach for real world data modelling with the 3D terrestrial laser scanner for built environment[J]. Automation in Construction, 2007, 16(6): 816-829.
[7]史玉峰,张俊,张迎亚.基于地面三维激光扫描技术的隧道安全监测[J].东南大学学报(自然科学版),2013, 43(S2):246-249.
[8]Giacomo B, Marco C, Lorenzo M, et al. Monitoring sediment source areas in a debris flow catchment using terrestrial laser scanning[J].Catena, 2014, 123: 23-26.
[9]刘昌军,张顺福,丁留谦, 等.基于激光扫描的高边坡危岩体识别及锚固方法研究[J].岩石力学与工程学报,2012,31(10):2139-2146.
[10]刘昌军,赵雨.基于三维激光扫描技术的矿山地形快速测量的关键技术研究[J].测绘通报,2012(6): 43-46.
[11]李永强,刘会云,毛杰,等.三维激光扫描技术在煤矿沉陷区监测应用[J].测绘工程,2015,24(7):43-47.
[12]Lian X, Hu H. Terrestrial laser scanning monitoring and spatial analysis of ground disaster in Gaoyang coal mine in Shanxi,China: a technical note[J]. Environ Earth Sciences, 2017,76(7): 287-298.
[13]党晓斌.三维激光扫描点云数据处理及应用技术[D].西安:长安大学地测学院,2011.
[14]Song B, Zheng N S, Li D W, et al. Reconstructing DEM using TLS point cloud data and NURBS surface[J]. Transactions of Nonferrous Metals Society of China, 2015, 25(9): 3165-3172.
[15]蔡越,徐文兵,梁丹,等.不同因素对地面三维激光扫描点云精度的影响[J].激光与光电子学进展,2017(9): 364-373.
[16]Kaasalainen S, Jsskkola A, Kaasalainen M, et al. Analysis of incidence angle and distance effects on terrestrial laser scanner intensity: search for correction methods[J]. Remote Sensing,2011, 3(10): 2207-2221.
[17]陈弘奕,胡晓斌,李崇瑞.地面三维激光扫描技术在变形监测中的应用[J].测绘通报,2014,12(12):74-77.