基于混合高斯模型与五帧差分的运动目标检测算法∗
2018-03-20李战明谭向阳
李战明 谭向阳
(兰州理工大学电气工程与信息工程学院 兰州 730050)
1 引言
目标检测是计算机图像处理的基础,是视频处理和编码的关键,根据应用范围分为静态目标检测和运动目标检测[1],同时目标检测也是目标行为理解、目标识别与跟踪的基础。在图像中运动目标在当前帧中所覆盖的区域称为前景,其余的部分为背景,许多时候我们感兴趣的目标只是前景部分,如目标行为理解、目标分类和目标计数中只对前景分析可以减少许多工作量,因此一套高效且准确的目标检测算法是目标分析技术的关键之一。目前常用的检测算法有三种:帧差法[2]、光流法[3]以及背景减除法[4~5]。帧差法的原理是将相邻两帧图像中像素值存在巨大差异的像素视为前景目标,因为在较短时间内环境中光线和环境变化较小,所以相邻两帧图像差分就能提取出前景。虽然帧差法实现简单、速度快,但是提取到的目标常常不完整,因此该方法常用于初步提取工作;光流法易受噪声和阴影影响,不仅计算复杂而且对硬件设备要求较高,否则得不到实时的检测结果;背景减除法中以STAUFFER C等提出的混合高斯模型方法[5]最为常见,混合高斯模型对一段时间序列内的像素点用一个或多个高斯模型描述,特别地,对一段时间内像素值波动范围大的多模态区域用多个高斯分布建模。对于变化的场景混合高斯模型通过模型的自动更新能得到相对于其它普通背景模型更可靠稳定的结果,但是该方法还存在一些问题:不能很好地解决因光线突变导致背景模型跟不上场景的变化等问题;提取到的运动目标内部存在大量空洞,轮廓不连续;采用统一的模型更新率,场景中背景显露区域——因运动目标移动而露出的区域的背景模型不能得到及时更新从而导致背景显露区域被误分割为前景。针对以上问题,本文利用帧差法对光照不敏感的特性结合改进的混合高斯模型对场景中不同区域赋予不同更新率的办法最后得到了很好的检测结果。
2 混合高斯模型
2.1 混合高斯背景模型理论
Stauffer[6]等提出一个特定像素的值随着时间的推移形成一个“像素序列”:

I(x0,y0,i)表示图像序列中像素点 (x0,y0)的像素值,并将这一系列像素点用K(3≤K≤5)混合高斯函数的加权和来建模,当前观测像素值Xt的概率表示为

式中 K 为高斯分布的个数;ωi,t,η(Xt,μi,t,Σi,t),μi,t,Σi,t分别为 t时刻第 i个高斯分布的权重、均值和协方差。η表示高斯概率密度函数:

K由计算机的可用内存和计算能力决定,为了计算简便假设协方差矩阵为。
具体假设为:彩色图像的RGB分量相互独立且有相同的方差,Ι为单位矩阵。本文采用灰度图像进行研究,则协方差矩阵就是当前分布的方差。K个高斯分布按优先级从高到低排列。

2.2 混合高斯背景模型参数更新
如果t时刻一个像素值为 Xt的像素点满足|Xt-μi,t|≤2.5σi,t,则称该像素点与混合高斯模型的第i个高斯分布匹配。并按照以下方式更新背景模型参数:
如果像素点和高斯分布匹配,则Mt为1,否则为0。仅对匹配的高斯分布更新均值和方差,而不匹配的分布则不更新;α,ρ为背景更新率,反映背景模型更新的快慢。如果像素点和背景模型中的任一分布都不匹配,那么当前总的分布个数小于K时增加一个新的高斯分布,当分布个数为K时,用一个新的分布替代优先级最小的分布,新的分布的均值为Xt,并用一个大的方差初始化该分布且该分布权重较小。
2.3 前景分割
随着背景模型的更新,和Xt匹配的分布权重增加、方差减小、优先级变大。则匹配次数最多的分布拥有最大的优先级,说明该分布最接近背景。将分布按优先级从大到小排列表示将最接近背景的分布放在前面,那么越后面的分布越不可能表示背景。因此用前B个分布来表示背景:

T3表示构成背景所需要的最小权重比例,T3取小的值表示背景用一个高斯分布表示,T3取较大的值表示背景用多个分布描述。若上述B个分布中至少有一个分布和像素点Xt匹配,则该像素点为背景点;否则为前景点,完成完成像素分割。背景图像中像素值 Xb,t表示为

3 混合高斯模型结合五帧差分
五帧差分法采用较短时间内的几帧图像提取前景,不会因光线发生突变而得到比实际大很多的变化区域即不会将背景区域误分为前景区域,并且能快速将图像分为背景区域和变化区域两部分,且变化区域内部含有较少空洞,结合混合高斯模型能将图像变化区域进一步划分为背景显露区域和前景区域,然后实行不同区域采用不同背景模型更新率的策略,最后采用改进的前景分割算法提取出运动目标。
本文检测流程如下:
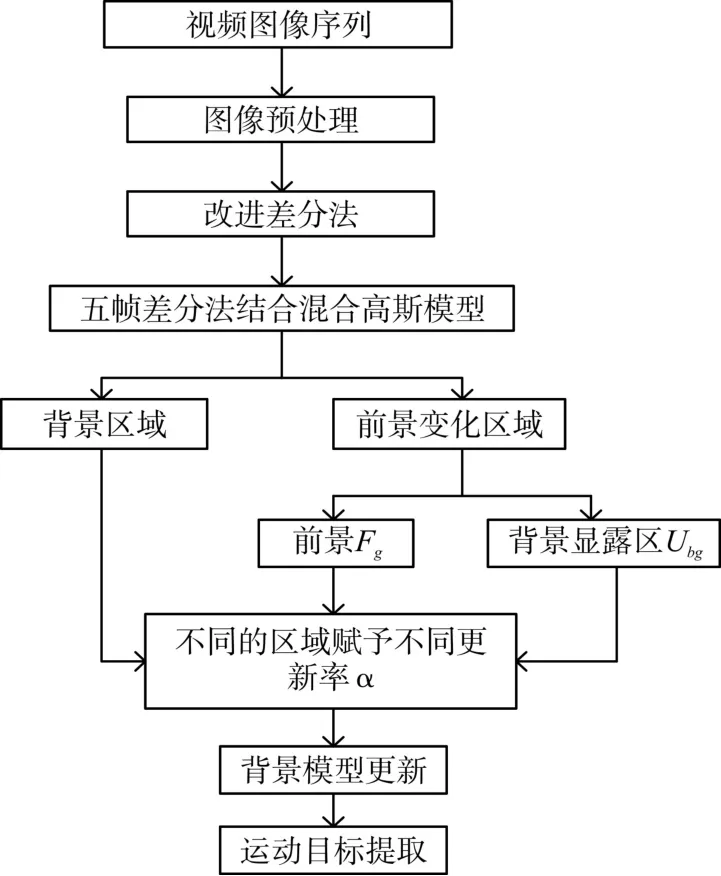
图1 本文算法流程
3.1 五帧差分法
帧差法的思想是将连续的两帧图像 ft-1,ft相减得到图像差分图像dt,dt包含了相邻两张图像的相对变化信息,因此能检测出运动目标。用d(i,j)表示两帧差分结果,两帧差分法可表示为

但是帧差法检测到的目标轮廓比实际的尺寸大,运动目标会出现“双影”现象。在帧差法基础上提出的三帧差分法[7],虽然能快速提取出运动目标的大致轮廓,但是得到的运动目标轮廓不连续而且内部含有较多空洞。因此将帧差法进行改进[8],思想如下:

用 ft-2(i,j),ft-1(i,j),ft(i,j),ft+1(i,j),ft+2(i,j) 表示一个图像序列中的连续五帧图像,d12,d23,d34,d45表示通过改进的帧差法得到的差分结果。Diff1表示第二帧图像与第三帧图像差分结果,Diff2表示第三帧图像与第四帧图像差分结果,通过式(4)、式(5)中的先做或运算再做与运算可以得到有更少空洞的Diff1和Diff2;Dfg表示第三帧图像中的运动目标;Dubg表示由五帧差分法得到的背景显露区域。
3.2 改进的前景分割方法
由于在前景提取过程中部分前景点被误检为前景,导致提取到的运动目标含有大量空洞。对于混合高斯模型,式(9)是提取前景出现空洞的主要原因,T3是一个阈值,表示背景像素值出现的时间占总体时间的比重。对于每一个密集活动区域的像素,代表真实背景模型的ωbackground= 是不稳定的,它会随着时间不断地变小或增大。当ωbackground>T3时像素可以正常地更新背景模型;当ωbackground<T3时,为了满足公式只能将表示前景的分布纳入背景。这样前景的像素值被误判为背景,运动目标内部就会出现空洞现象[9]。本文采用如下分割方法:
如果像素值 Xt与任一权值ωi,t>1/K的分布匹配,那么该像素点为背景,否则为前景:

这样能减少权值较小的分布和新加入的分布对模型的影响,能有效减少运动目标内部空洞。
3.3 模型更新率选取
传统的混合高斯模型所有像素点都采用统一的更新率α,如果α过大的话对于背景区域需要很长时间才能建立稳定的模型,且容易引入噪声;当α过小,模型更新速度太慢,从而不能反映真实背景,比如会把运动目标经过后显露出的部分误分为前景,移动缓慢的物体且颜色一致的的大型物体,在进行前景检测时,可能会出现内部空洞的现象[10]。静止的目标开始运动后会在原地留下“影子”。因此将一帧图像分为三部分,对不同部分采用不同的更新率[9]。
3.3.1 图像区域划分
3.1中五帧差分法得到的Diff1包含了图像的背景部分Abg和相邻两帧发生了变化的区域Ac,其中 Ac包含运动目标 Afg以及背景显露区域Aubg。如果Diff1区域中像素值Xt与背景模型中任一权值ωi,t-1>1/K的分布匹配,那么该像素点为Aubg,否则为Afg。但是此种方法区分出的区域由于受到光照等影响会存在一定几率将背景显露区域判别为Afg区域,因此结合前文中的五帧差分法提取更精确的背景显露区域:

3.3.2 不同区域更新率α的选取
赋予背景区域Abg中像素点对应的多维混合高斯分布模型小的更新率,保持背景区域的稳定性,避免引入噪声[11];赋予前景区域Fg较小的更新率α,避免噪声的影响;赋予背景显露区域Ubg较大的更新率α,因为背景显露区域Ubg至少有一个分布与像素值匹配,则背景模型参数更新后匹配的高斯分布将拥有较大权值ωt,由混合高斯模型的前景分割原则可知,Aubg区域将被判别为背景,背景显露区域得到快速恢复。
4 实验结果与分析
实验条件为:Intel Core I3-4160 CPU 3.6GHz,4G内存,Visual Studio 2013开发平台,运用OpenCV2.4.11进行编程实现。为了验证本文算法的有效性,选取了三段视频来检测算法的灵敏度。
图2中图(a)(d)是测试序列中的连续两帧图像,图(b)和(e)是使用经典混合高斯模型提取到的前景,图(c)和(f)是本文算法得到的结果。通过比较可以看出改进之前的高斯混合模型算法,不能提取目标的完整轮廓,只能提取部分目标,而且目标内部存在大量空洞;对于非目标运动区域存在一些伪前景点(将背景像素点区分为前景像素点)。本文算法提取到的前景目标对像能提取出完整的目标对象,且有效减少了运动目标内部空洞。
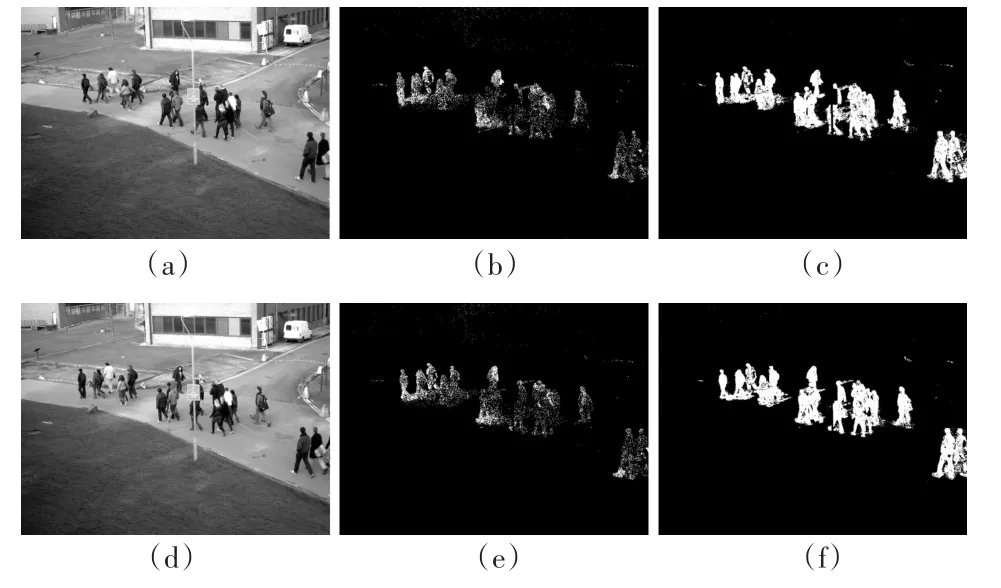
图2 算法改进前后效果比较
如图3所示,图(a)(b)选取的是车辆由静止开始运动的图像,图(c)和(d)分别是使用混合高斯模型和本文算法提取的前景结果。可以看出改进之前的结果部分背景显露区域被误检测为背景,而利用本文算法较好地解决了该误检测问题。
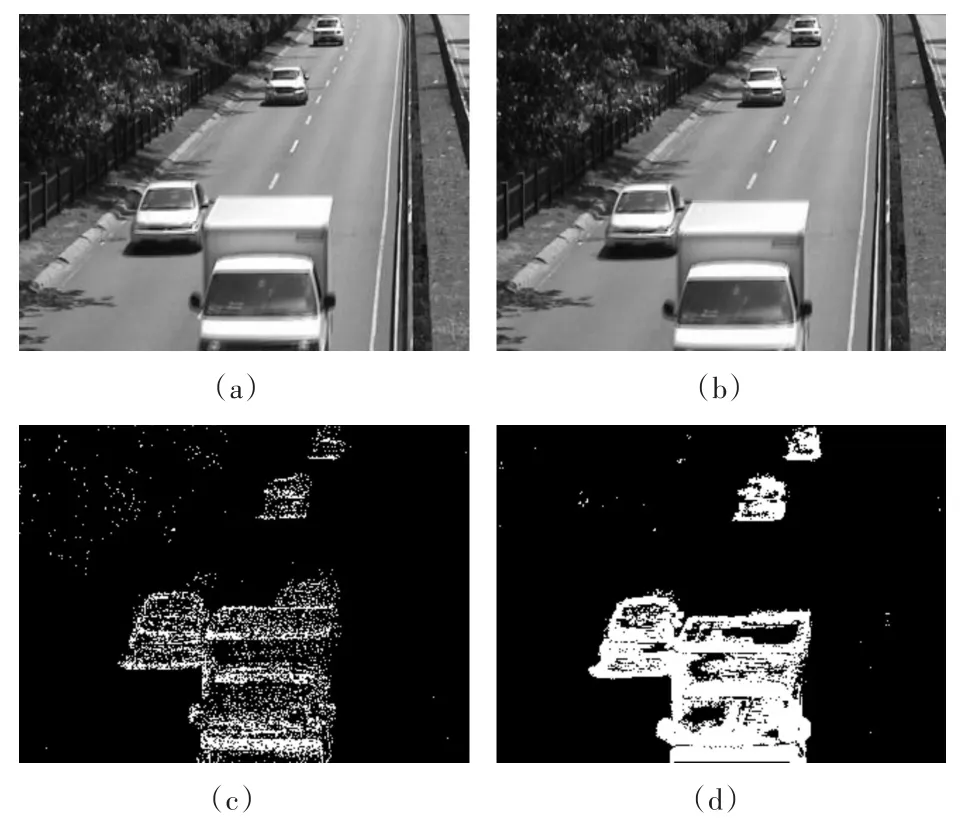
图3 算法改进前后效果比较

图4 算法改进前后效果比较
如图4所示,图(a)(d)选取的是光线变化强烈两帧图像,图(b)和(e)、(c)和(f)分别是使用混合高斯模型和本文算法提取的前景结果。可以看出改进之前的混合高斯模型算法由于受到光照突变的影响,检测效果不理想。而利用本文算法较好地提取了前景目标。
5 结语
本文提出基于混合高斯模型的运动目标检测算法,通过基于改进帧差法提出的五帧差分法,能有效减少前景内部空洞并初步将图像分为背景和变化区域,通过像素点和已有模型匹配,进一步将变化区域分为背景显露区域和运动目标区域,赋予各个区域不同的更新率,保证背景稳定的同时对目标显露区域赋予较大更新率保证了目标从静止开始缓慢运动形成的“双影”被消除。此外,在前景分割阶段只对权值大于平均权值1 K的分布进行匹配判断,进一步减少了目标内部空洞。结合利用帧差法对光照变化不敏感的特性,能有效解决传统混合高斯模型对于场景中光照变化强烈时,不能较好提取运动目标的问题。实验表明本文算法能有效地检测运动目标,可用于对目标的跟踪和分析。
[1]夏永泉,李卫丽,甘勇,等.智能视频监控中的运动目标检测技术研究[J].通信技术,2009,42(6):185-187.
XIA Yongquan,LI Weili,GAN Yong,et al.Studies on Moving Objects Detection Technology in Intelligent Video Surveillance[J].Communications Technology,2009,42(6):185-187.
[2]陆海亭,张宁,黄卫,等.短时交通流预测方法研究进展[J].交通运输工程与信息学报,2009,7(4):84-91.
LU Haiting,ZHANG Ning,HUANG Wei,et al.Research Progress of Short Term Traffic Flow Prediction Methods[J].Journal of Transportation Engineering and Informa⁃tion,2009,7(4):84-91.
[3]Chen P H,Lin C J,Schölkopf B.A tutorial on ν-support vector machines[J].Applied Stochastic Models in Busi⁃ness and Industry,2005,21(2):111-136.
[4]Breiman L.Random Forests[J].Machine Learning,2001,45(1):5-32.
[5]Lee D S.Effective Gaussian Mixture Learning for Video Background Subtraction[J].Pattern Analysis&Machine Intelligence IEEE Transactions on,2005,27(5):827-832.
[6] Chris Stauffer,W.E.L.Grimson.Adaptive Background Mixture Models for Real-Time Tracking[C]//cvpr.IEEE Computer Society,1999:2246.
[7]刘静,王玲.混合高斯模型背景法的一种改进算法[J].计算机工程与应用,2010,46(13):168-170.
LIU Jing,WANG Ling.Improved algorithm of Gaussian mixture model for background subtraction[J].Computer Engineering and Application,2010,46(13):168-170.
[8]华媛蕾,刘万军.改进混合高斯模型的运动目标检测算法[J].计算机应用,2014,34(02):580-584.
HUA Yuanlei,LIU Wanjun.Moving object detection algo⁃rithm of improved Gaussian mixture model[J].Journal of Computer Applications,2014,34(2):580-584.
[9]邓若曦,杨当福,刘圣军,等.基于像素状态的背景建模方法[C]//全国计算机辅助设计与图形学会会议,2014.
DENG Ruoxi,YANG Dangfu,LIU Shengjun,et al.A back⁃ground subtraction algorithm based on pixel status[C]//Chinagraph,2014.
[10]罗铁镇.基于混合高斯模型的运动检测及阴影消除算法研究[D].长沙湖南大学,2010.
LUO Tiezhen.The research of motion detection based on Gaussion mixture model and shadow elimination algo⁃rithm[D].Changsha:Hunan University,2010.
[11]刘鑫,刘辉,强振平,等.混合高斯模型和帧间差分相融合的自适应背景模型[J].中国图象图形学报,2008,13(4):729-734.
LIU Xin,LIU Hui,QIANG Zhenping,et al.Adaptive Background Modeling Based on Mixture Gaussian Model and Frame Subtraction[J].Journal of Image and Graph⁃ics,2008,13(4):729-734.
