直角坐标喷涂机器人移动平台设计
2018-03-20曲永亮
曲永亮
(长安大学汽车学院,陕西 西安 710064)
前言
随着社会的快速发展,科技的不断进步,机器人在社会的发展过程中起着越来越重要的作用。机器人能够代替人在环境比较恶劣的场合作业,对喷涂行业而言,喷涂过程中挥发出来的有毒气体严重危害这工人的身体健康,因此,喷涂机器人在社会中的应用将越来越广泛。
本文基于ANSYS Workbench软件对机器人移动平台车架进行有限元分析,通过对车架强度分析,进行优化设计。
1 喷涂机器人移动平台的整体设计
1.1 喷涂机器人移动平台整体结构
本次设计的移动平台是基于已设计好的直角坐标喷涂机器人而进行设计的。移动平台的整体结构如图1所示。

图1 机器人移动平台的布局图
1.2 发电机的选择
鉴于汽油发电机体积小,便于移动,噪音小,功率相对于柴油发电机来讲也比较小,一般适合小型企业或小型的施工现场,本设计采用日本雅马哈EF13000TE汽油发电机,其相关配置和参数如表1所示:

表1
1.3 脚轮的选择
移动平台脚轮采用万向轮,轮径大小的选择首先应考虑承载的重量和荷重下搬运车的起动推力,其单轮所需的载重能力计算如下:

式(1)中:T为单轮或万向轮所需承载重量;E为运输设备的自重;Z为最大荷重;M为所用单轮和万向轮的数量;N为安全系数(约1.3-1.5)。
1.4 机器人移动平台车架的设计
喷涂机器人的移动平台是各种机械结构的载体,它承载着其它机械结构和搭载元件的部分重量,同时也是其它部件的定位基准。这就要求机器人底盘具有一定的强度、刚度和较高的可靠性。另外,根据喷涂机器人指标要求,移动平台应该具有较高的通过障碍能力,在进行底盘设计时,应该充分考虑到底盘通过能力。与此同时,还应该考虑到移动平台在运动过程中的稳定性。
本次车架的设计选用方钢进行焊接,制造成本低,结构简单,重量轻。并根据已选定的发电机以及空气压缩机的尺寸进行车架的布局,整体CATIA模型图如图2所示。

图2 机器人移动平台整体结构CATIA模型图
1.5 零件材料选择
从材料选用原则的使用要求、加工要求和经济要求出发,选择各零部件的材料。轴类零件材料的选择时,传动轴的常用材料有碳素钢和合金钢。碳素钢对应力集中的敏感性较低,还可通过热处理改变其综合性能,价格也比合金钢低廉,因此应用较为广泛,本设计移动平台结构中的转轴采用 45号钢,即可满足设计要求的需要。
2 车架的强度分析
在ANSYS Workbench中创建设计车架的有限元模型,如图3所示。

图3 车架有限元模型
并进行施加载荷及载荷选项、设定约束条件,求解后可得到车架的等效应力图如图4所示。

图4 车架等效应力分布云图
从图4中可以看出,车架应力的最大值为6.54MPa,车架受力最大的地方发生在安装车轮的八根横梁以及承载发电机的横梁处(如图所5示)。因此在车架焊接的过程中对于这两处的焊接要求就相当高。本次车架采用结构钢焊接,弹性模量为2×105,泊松比为0.3,屈服强度为345Mpa,车架的应力远远小于屈服强度,完全可以满足强度要求。
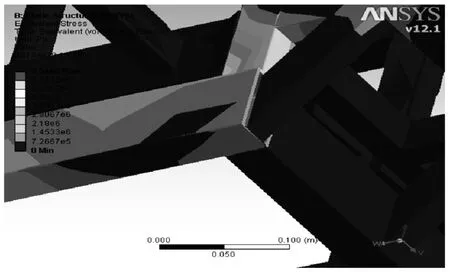
图5 车架应力最大值处

图6 车架变形云图

图6 车架变形最大值处
在直角坐标喷涂机器人喷涂的过程中需要保证一定的喷涂精度,这就要求车架的变形不能过大。从图6中可读出车架的最大变形量为 0.0327mm,车架变形主要表现在车架的中间部位,而车架变形最大的地方同样发生在安装车轮的八支横梁以及承载发电机的横梁处,如图6所示。其变形量相当小,对于喷涂要求不会造成影响。因此,车架的设计满足设计要求。
3 结论
本文设计了一种轮式地面移动机器人平台,并利用有限元分析软件ANSYS Workbench对所设计车架进行模拟试验,有效地分析预测所设计车架结构的强度,为车架的设计提供理论依据。
[1] 李磊,陈细军,候增广等.自主轮式移动机器人 CASIA-I的整体设计[J].高技术通讯, 2003, 11:5-55.
[2] 谢世坤,程从山.基于 ANSYS的边梁式车架有限元模态分析[J].机电产品开发与创新,2005,(1).
[3] 张朝晖.ANSYS结构分析工程应用实例解析[M].北京:机械工业出版社,2010:509-537.
