汽车AEB电子系统开发
2018-03-20孙建兴
孙建兴
(北京汽车股份有限公司,北京 101300)
引言
由于AEB电子系统极大减少了交通事故率,因此在车辆中得到越来越多的应用,在国际上欧美地区已将AEB配置写入法规。
AEB电子系统要有良好的可靠性、安全性和舒适性,同时要避免AEB系统的误触发和报警带来的困扰。
由于各公司开发的AEB的控制策略和逻辑各不相同,从保障行人和车辆的安全考虑,需要对AEB电子系统性能进行规定。
1 AEB电子系统介绍
AEB电子系统包括毫米波雷达、视觉系统、处理器,通过汽车CAN网络与ESP和EMS系统进行通讯。其工作过程包括制动准备、报警、制动辅助。
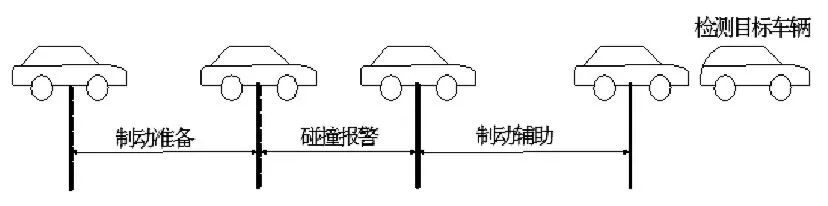
图1 AEB工作过程示意图
毫米波雷达主要用于探测前方障碍物距离、速度等参数,不受天气等环境因素干扰。
视觉系统包括摄像头和处理器。可用于障碍物图像识别和分类,也具备探测距离功能。摄像头受天气及光线影响较大。
处理器把雷达和摄像头检测到的数据进行融合计算分析,根据与前方行人或车辆的碰撞时间和距离,做出控制决策。
2 AEB电子系统控制逻辑
AEB通过视觉系统采集丰富的路况、车况信息,建立图像数据库。车辆在行驶过程中,摄像头采集路况信息,提取图形,再通过数据库的比对,进行障碍物的识别。同时,毫米波雷达也对障碍物进行探测。AEB控制逻辑如下图所示:
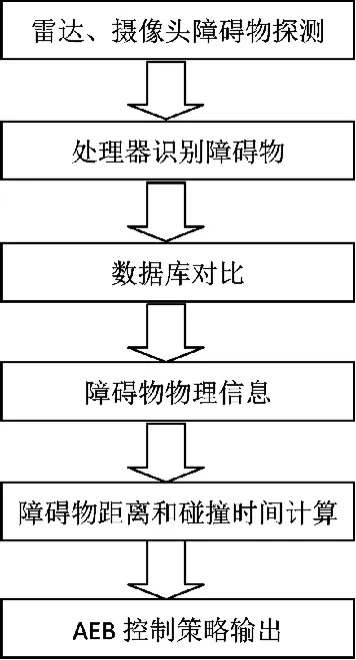
图2 AEB控制逻辑
中国的路况特别复杂,行人、机动车、非机动车混行的情况较多,由于图像数据库的限制,AEB系统仍然不可避免做出误判或错误决策。为解决此问题,有很多企业已经开始研究采用AI深度学习的技术来解决障碍物的识别问题。
3 AEB性能开发
AEB电子系统对前方150m范围内障碍物进行跟踪。系统设计尽量减少碰撞预警信号,避免在驾驶员不认为会与前方车辆发生碰撞的情况下自动制动。
3.1 障碍物识别
视觉系统需要建立一个障碍物图形库,根据探测的物体外形与图形库对比,确定障碍物类型后,再根据系统计算若在碰撞时间内则进行报警或制动。
某车型开发的AEB,在行驶过程中出现频繁报警,或出现有障碍物未进行主动制动,用户体验欠佳。经分析,系统计算模型需优化。
3.1.1 优化前计算模型
原计算模型对前方全部障碍物进行识别,采用冒泡排序法,确定跟踪目标。当相邻车道车辆制动时,本车AEB发生报警,非预期报警,需排除。

图3 相邻车道制动试验
3.1.2 优化后计算模型
原计算模型不变,增加前方直行距离和侧向距离限制条件。本车道外侧 0.3m区域内障碍物仅进行跟踪识别,不进行报警。排除侧方车辆干扰。如图4所示。

图4 相邻车道制动试验
3.2 AEB功能测试
3.2.1 AEB性能要求
AEB应根据中国驾驶员特性进行算法开发,解决驾驶员感受和紧急制动之间的矛盾。
车辆驾驶者对危险的判断和TTC(碰撞时间)直接相关,当TTC 3.0s以上时,驾驶者不会感觉到风险存在。在TTC 1.6s以下时,驾驶者会觉得很危险。
安全距离是判定同一车道上本车与前车是否存在碰撞危险的距离值,它包括提示报警距离和主动制动距离。
提示报警距离应保证驾驶员有较充足的反应时间,并能进行正确的操作,在这个阶段AEB系统只会报警,不会介入驾驶员操作。
主动制动距离通过计算,可以使汽车解除制动后与前车仍保持1m的距离而不至于与前车碰撞,也可以将碰撞损伤降至最小距离后,系统将跳过驾驶员操作,直接制动车辆。

表1 AEB触发条件

表2 障碍物为车辆的性能要求
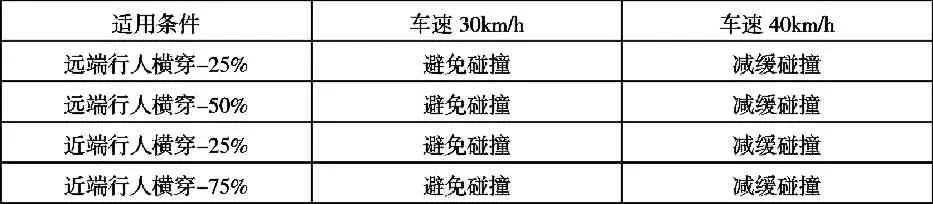
表3 障碍物为行人的性能要求
3.2.2 AEB功能测试
(1)AEB车辆追尾测试

图5 追尾测试实验
某车型AEB进行了追尾试验测试,当前方车速为0km/h时,自车速≤40km/h时,可完全避免碰撞,自车速>40km/h时,减缓碰撞;当前方车速为 20km/h时,自车速≤65km/h时,可完全避免碰撞,自车速>65km/h时,减缓碰撞;当前方车速为以4 m/s2减速时,自车速50km/h时,与前方车距12m时,减缓碰撞,与前方车距40m时,可完全避免碰撞。经测试,碰撞试验满足表2规定的性能要求。
(2)AEB误作用试验

图6 AEB误作用试验
某车型AEB误作用试验,当相邻车道车辆以3 m/s2减速时,AEB系统不触发,满足要求。
(3)行人AEB测试

图7 AEB远端行人试验

图8 AEB近端行人试验
某车型行人AEB测试,从远端横穿-25%时,车速30km/h时,避免碰撞,车速 40km/h时减缓碰撞;从远端横穿-50%时,车速30km/h时,避免碰撞,车速40km/h时减缓碰撞;从近端横穿-25%时,车速30km/h时,避免碰撞,车速40km/h时减缓碰撞;从近端横穿-50%时,车速 30km/h时,避免碰撞,车速40km/h时减缓碰撞。经测试AEB行人碰撞满足要求。
(4)道路测试
某车型新开发 AEB场内测试合格后,在城市道路进行1000公里测试,和高速公路1000公里测试。通过实际道路测试,进一步检验了AEB系统障碍物识别和计算模型。经实际道路测试,某车型新开发AEB无误报问题,AEB报警和主动刹车介入及时。
3.2.3 测试数据分析
在进行节3.2.2所述测试项目时,需通过测试设备,采集本车速度、本车加速度、ttc时间、两车相对距离、前车速度,等参数进行分析,以评判AEB的性能。
以本车车速30km/h,前车静止的工况为例,得到以下分析数据:

图9 TTC与时间关系曲线
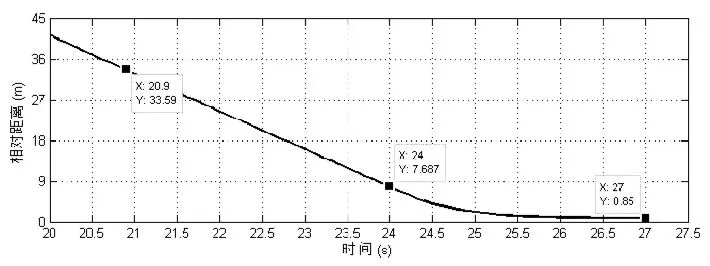
图10 相对距离与时间关系曲线
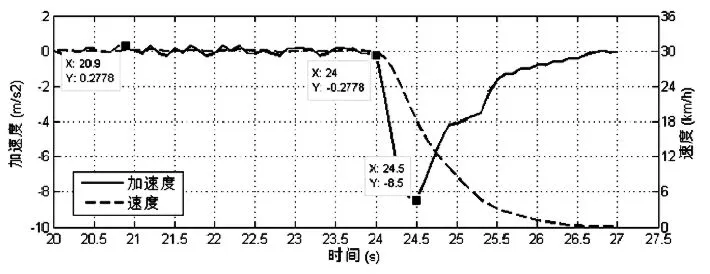
图11 加速度、速度与时间关系曲线

图12 速度与行驶距离关系曲线
由曲线图参数可得出以下结论:

表4 CCRs 30试验结论
由上述结论可知,某车型新开发AEB的该项测试符合要求。
4 结束语
AEB电子系统极大的提高了安全性,已日渐成为车辆的主流配置。未来随着 AI技术的进步,和毫处理器的技术进步,AEB系统必将进一步提升安全性,减轻建立图形数据库的工作量,但是会增加深度学习的计算工作量,对处理器的计算能力要求更高。
