基于STM32的四旋翼无人机在线监测系统研究★
2018-03-19周健王远航黄创绵杨剑锋严拴航闫攀峰
周健 , 王远航 , 黄创绵 杨剑锋 , 严拴航 , 闫攀峰
(1.工业和信息化部电子第五研究所,广东 广州 510610;2.广东省电子信息产品可靠性技术重点实验室,广东 广州 510610;3.广东省无人机可靠性与安全性工程技术研究中心,广东 广州 510610;4.广东省工业机器人可靠性工程实验室,广东 广州 510610;5.航空工业第一飞机设计研究院,陕西 西安 710000)
0 引言
近年来,随着民用无人机产业链的逐步完善及规模化生产和应用,中国无人机市场已经进入了井喷式发展时期[1]。然而,产业快速扩大的同时也逐渐地暴露出了一些问题,例如:飞行安全性、对不同环境的适应性和黑客控制的信息安全性等。因此,国家相关部门先后出台了系列管理办法以促进行业的健康发展[2]。由于无人机的类型、尺寸和飞行剖面种类繁多,因此,发展这类系统的安全运行通用标准和相关草案较为困难[3-4]。在加强监管力度的同时,如何在无人机有限的载荷下提升无人机自身的飞行安全水平是无人机领域面临的关键共性问题。
国内外对于无人机飞行安全的检测与评估主要是针对无人机控制系统、故障诊断和续航能力的评估,对于无人机实时飞行状态的检测与评估却未能跟上步伐[5]。而四旋翼无人机依靠4个旋翼之间的互相配合来实现6个自由度的操纵,旋翼之间耦合紧密,冗余度小,因此,四旋翼无人机上个别部件的异常往往会造成无人机的性能恶化,甚至失控坠毁[6]。因此,在线监测四旋翼无人机的状况,对于促进四旋翼无人机的安全飞行具有重要的意义。
本文所设计的四旋翼无人机状态监测系统则基于STM32F42x系列处理器,通过利用先进的传感器集成,实时监测无人机的使用环境、工作状况和部件状态等信息,并将实时监测的数据通过射频信号传输至地面站,地面站提取能够影响无人机飞行安全的关键数据并进行实时监测,以期最大程度地减少意外故障,从而提升无人机自身的安全飞行能力。
1 无人机状态监测系统的架构设计
如图1所示,无人机状态监测系统由无人机、无线数据传输模块和地面站构成。无人机上搭载采集板,采集板在实现对无人机的飞行控制功能的同时,对无人机的飞行状态相关数据进行采集。
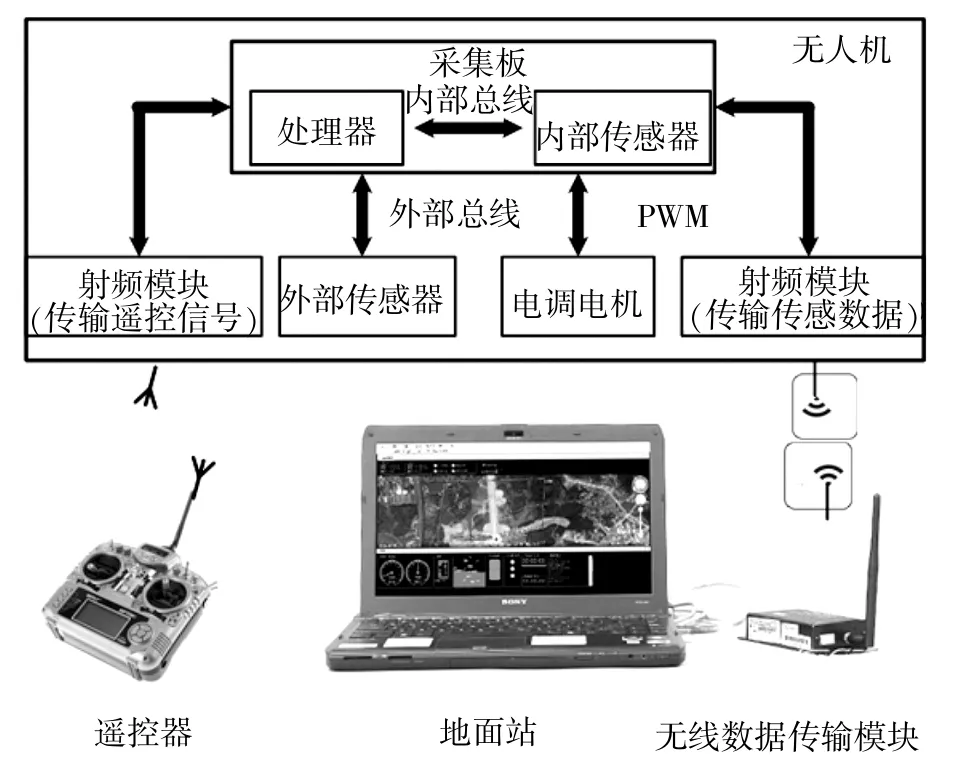
图1 无人机状态监测系统的架构
对于无人机三轴姿态角、三轴角速度、三轴线速度、三轴线加速度和气压高度等无人机惯性数据的采集,将相关传感器内置于采集板,通过内部总线将数据提供给处理器。对于无人机动力电池电压、充放电电流、环境温湿度、电池温度和电机振动等反映无人机部件状况的状态数据,则根据无人机各个部件的分布情况,将相关传感器外置,通过外部总线将数据提供给处理器。处理器采集所得的数据通过无线射频的方式进行传输,在地面上的无线数据传输模块接收射频信号并传输给地面站,地面站对所采集的数据进行解析、分析、处理和显示,实现对无人机的实时监测。
2 无人机采集板的设计
系统使用的采集板传感器系统如图2所示,该系统将与无人机惯性数据采集相关的传感器内置,不仅在传感器种类上进行了冗余互补,对同一类数据也配备了不同的传感器来采集,通过传感数据的冗余和互补来提高融合滤波的效果。
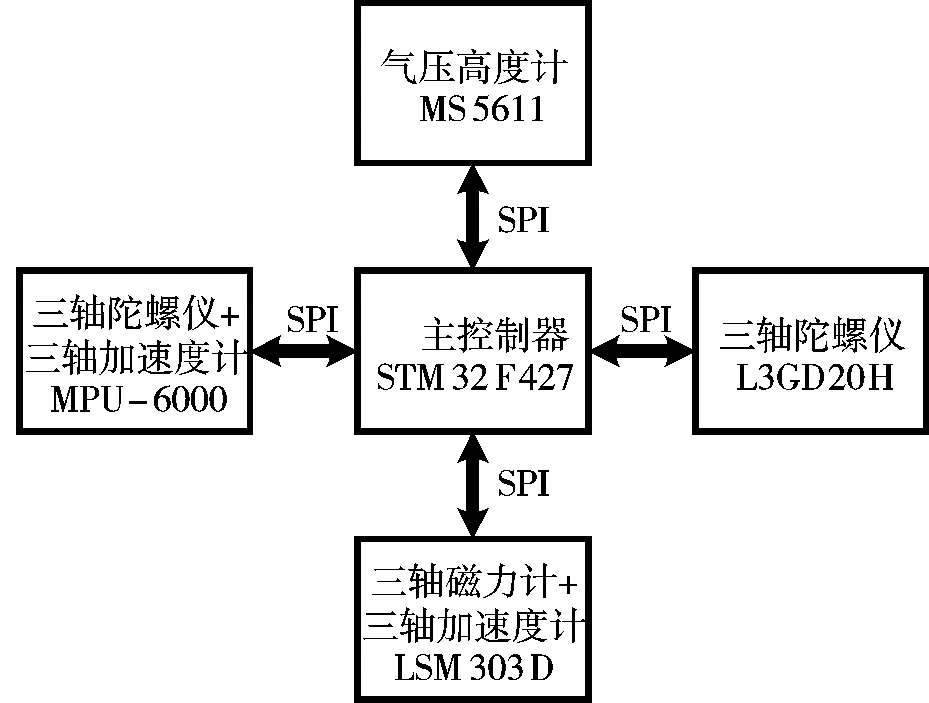
图2 无人机采集板传感器系统
2.1 处理器
本文使用处理能力较强的STM32F42x系列处理器,该处理器采用了带有浮点计算单元 (FPU)的ARM 32位Cortex-M4 CPU,在FLASH中实现零等待状态运行性能的自适应实时加速器,该处理器主频为180 MHz,具有DSP指令集,能够实现高达225 DMIPS的计算性能。
2.2 惯性数据的采集
采集板内置传感器需要完成无人机三轴姿态角、三轴加速度、三轴线速度和气压高度等惯性数据的采集,考虑到无人机机载设备要求体积小、功耗低,因此,选用MEMS传感器来完成上述数据的采集。MEMS传感器采用微电子和微机械加工技术制造,特征尺寸至微米/纳米级。在无人机应用上,MEMS传感器可以将惯性参量转换成电信号,并进行必要的信号反馈控制、补偿、量化和压缩编码。但是MEMS惯性器件的导航误差会随着时间而积累,为了提高精度,本文利用多传感器冗余互补措施,通过传感器之间的冗余数据,增强系统的可靠性和观测范围;同时,借助误差不随时间积累的辅助导航系统提供的信息来补偿和抑制MEMS传感器在惯性导航中随时间而积累的误差,进而达到提高整个导航系统精度的目的。
本文基于多传感器冗余互补来实现惯性数据的精确测量,使用的传感器包括三轴陀螺仪、三轴加速度计和三轴磁力计。陀螺仪在角速度的测量上具有很好的动态响应,但积分得到的姿态会出现累积误差;而加速度计可以测量物体的运动加速度和重力加速度,因此可以获得被测物体的加速度和倾角,并且对静态姿态角的测量没有累计误差,但加速度计无法辨别运动加速度与重力加速度,所以动态特性差;磁力计可以测量地磁偏角,进而换算得到被测物体的位姿,但电子罗盘动态特性不足,并且抗电子干扰能力差,而无人机上的动力电机等电子设备均会产生电子干扰。因此,这几种传感器都有很强的互补特性,通过这几种传感器的信息融合处理,可以显著地提升测量精度。
2.3 状态数据的采集
对于无人机动力电池电压、充放电电流、环境温湿度、电池温度和电机振动等状态数据,则依据无人机动力电池、无刷电机的位置分布来配置相应的传感器进行检测。Pixhawk IV传感器可以同时检测输入电压电流,并将动力锂电池输入电压转换为采集板所需要的5 V供电。电压检测是在输入侧并联两个分压电阻,AD转换分压后的电压,经换算得到输入电压;电流检测则是在母线上串联采样阻值,电阻上的压降经过运放放大后达到能被AD转换器检测的幅度,通过AD转换得到的电压即可换算出母线电流。AD转换得到的电压电流数字量,经I2C总线传输至采集板,从而实现对无人机动力电池电压电流的检测。
对于环境温湿度的检测,本文考虑采用SHT30-DIS传感器。SHT30-DIS传感器可将温湿度转换成数字量,通过I2C总线传输至采集板。温度测量采用热电偶的方法,热电偶由两种不同材料的金属丝组成,两种材料的一段焊接在一起形成工作端,置于被测温度处;另一端为自由端,与测量仪表相连形成一个封闭回路。当工作端与自由端的温度不同时,回路中会出现热电动势,经过AD采样即可得到随温度变化的电压值。湿度测量则依托一种沉积在两个导电电极上的聚胺盐或醋酸纤维聚合物薄膜,薄膜含水量的变化会改变两个电极之间的介电常数,进而引起电容值的变化,将湿度转化为电信号。
振动传感器按测量参量的分类可以分为3类:位移传感器、速度传感器和加速度传感器。位移传感器适用于低频测量,速度传感器适用于高频测量,加速度传感器适用于中高频测量。由于加速度传感器具有生产工艺成熟、频响范围宽和动态范围大等特点,因而在振动测试中应用得最广。另外,使用惯性原理的MEMS加速度传感器体积小、重量轻,可以方便地应用在无人机上,因此,本文选用MEMS加速度传感器IC268G来实现对机体振动信号的测量。
3 无线数据传输模块
首先,由于2.4 G Wi-Fi可以兼顾传输距离与传输速率,便于无人机在一定距离下以较大的带宽传输所采集的传感数据;其次,由于无线传输的数据最终还需传送到地面站上,而对于地面站而言,若可以直接接入标准的Wi-Fi而无需增加新网关的话,会使得整体的方案更加简单可靠;第三,2.4 G Wi-Fi模块也在无人机的载荷范围内。综合上述原因,本文最终采用了2.4 G Wi-Fi射频传输来实现无人机传感数据的无线传输。
3.1 射频硬件
受机载处理器性能的限制,机载采集板无法直接驱动MAC层的Wi-Fi芯片,只能使用自身带有的处理器、将物理层和MAC层都封装好的Wi-Fi模块,采集卡上的控制器通过发送指令实现Wi-Fi模块的配置和数据传输。因此,模块所使用的总线接口必须具备高速传输能力,才能保证较大的带宽。嵌入式控制器间常用的底层通信总线有SPI、I2C和UART,这3种总线的简单对比如表1所示。
由表1中可以看出,SPI总线是一种全双工的高速总线,可以保证采集卡控制器和Wi-Fi模块之间快速地交换数据。因此,采集卡上选用了具有SPI接口的RAK421 Wi-Fi模块实现机载射频通信。该模块的系统框图如图3所示。
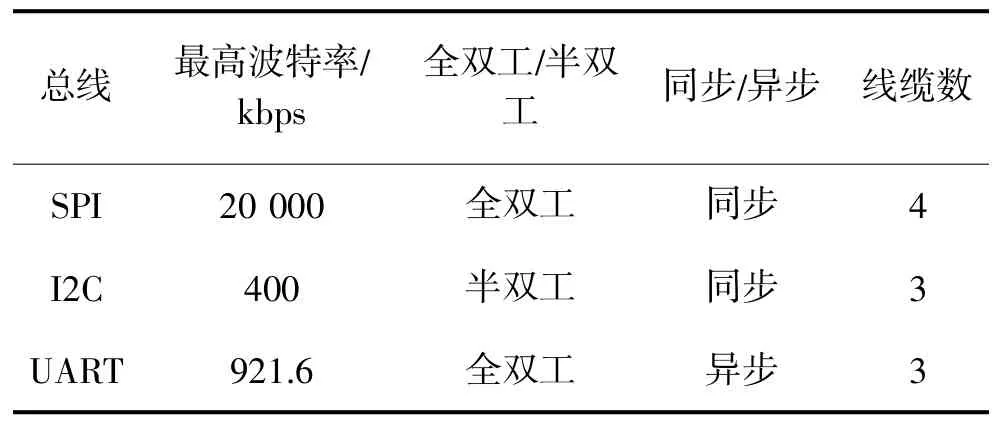
表1 SPI、I2C和UART总线对比

图3 RAK421 Wi-Fi模块系统框图
为了进一步地增加射频模块的工作范围,本文考虑采用功率放大模块XQ-02A对2.4 GHz射频信号进行放大处理。如图4所示,XQ-02A模块可自动地切换收发状态,在接收到地面站的指令时,将数据传给Wi-Fi模块,处理器通过SPI总线接收到指令信息。当处理器需要将采集得到的数据发送时,则将射频信号放大发回地面。

图4 无线数据传输系统结构图
3.2 通讯协议
为了实现较为可靠的无线数据传输,本文基于传输控制协议 (TCP:Transmission Control Protocol)进行无人机传感数据的传输,即通过交互TCP报文实现无人机采集卡与地面站之间的数据传输。TCP作为通信协议,是一种面向连接的、可靠的、基于字节流的传输层通信协议,在简化的计算机网络OSI模型中,TCP完成第四层传输层指定的功能。TCP进行数据传输的流程如下:
1)建立TCP连接,协议规定使用3次握手协议建立连接,这样可以防止产生错误的连接;
2)主机与客户端根据IP地址和端口号进行数据传输和交换;
3)终止TCP连接,协议规定使用4次握手协议来终止TCP连接。
TCP协议只定义了报文在网络中传输的标准,但报文所携带的内容需由应用程序自行定义和解析。因此,本文需要定义传感数据的报文格式,且采集卡和地面站使用相同的报文格式进行编码和解析。报文有两种基本的数据格式:ASCII和二进制,ASCII报文易以理解,并且可使用已有的库函数来实现分析处理功能;二进制报文则结构紧凑,能够提高带宽利用率。为了充分地利用传输带宽,本文采用了二进制报文。
因此,整个监测系统的工作流程如图5所示。无人机上各传感器将目标状态转换为电信号,处理器采集电信号并转换为相应的状态量。主控制器采集到状态量后,首先,进行扩展卡尔曼滤波,得到滤波后的无人机状态数据;然后,按照定义好的报文格式编码成数据报文,进而封装成TCP报文,通过2.4 GHz射频信号将数据无线发送出去,地面站接收到射频信号数据后,从TCP报文中提取数据报文,并按照定义好的格式进行解码,得到其中携带的无人机监测数据,并将数据进行分析、显示和存储。
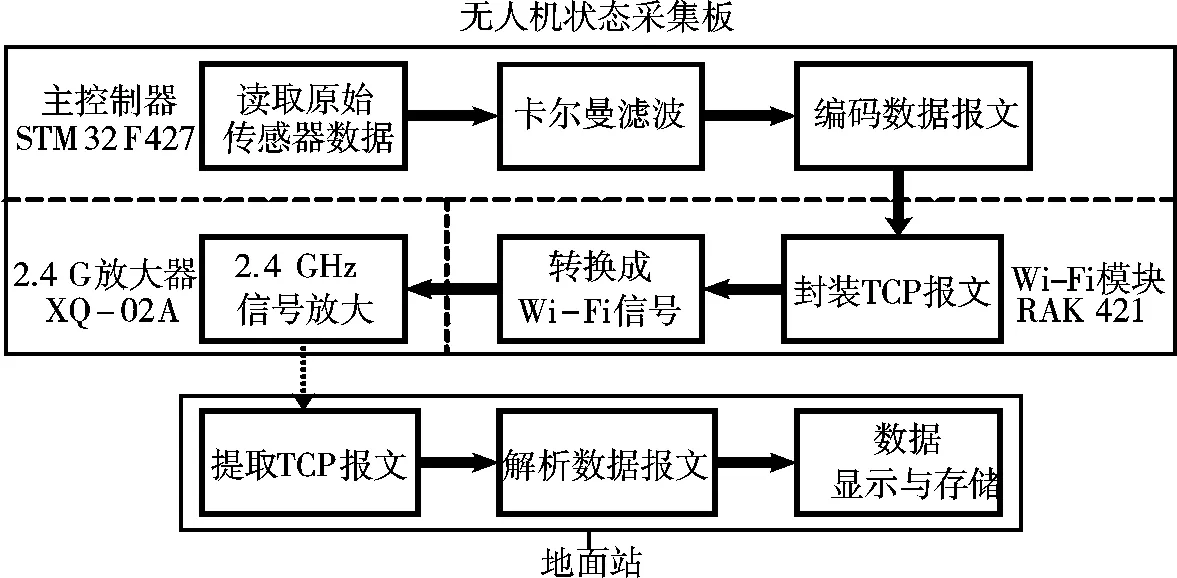
图5 无人机状态监测系统工作流程
4 无人机状态监测应用实例
本文基于上述无人机状态检测系统开发样机,如图6 a所示,无人机样机基于2.4 GHz射频信号进行无线数据传输,利用TCP协议传输传感器数据报文。无人机样机在TCP服务中作为主机,因此,地面站软件以TCP客户端的方式连接无人机,接收无人机发送的TCP报文,按照自定义的数据格式解析报文,解析得到的传感器数据一方面显示在软件界面上,一方面将数据存储以供后续分析。地面站软件如图6 b所示,基于Qt进行开发,Qt是一个跨平台的C++图形用户界面应用程序开发框架,具有较为直观的应用程序编程接口。作为面向对象的框架,用户界面基于元对象编译器 (Meta Object Complier)生成扩展,这使得在Qt上开发GUI图形界面程序极为便捷。
无人机以100 Hz的频率将采集到的无人机数据实时传回地面站,无人机在悬停状况下,监测系统采集到的偏航数据如图7所示。由图7中可以发现,样机在51、56 s附近,俯仰角、横滚角和偏航角均发生了较大的变化,但是无人机都在一段时间后将姿态调整为正常状态。因此,无人机虽然正常悬停,但是在线监测系统却检测到了其中的异常,这将为无人机安全性的提升提供重要的依据。

图6 无人机状态监测系统样机
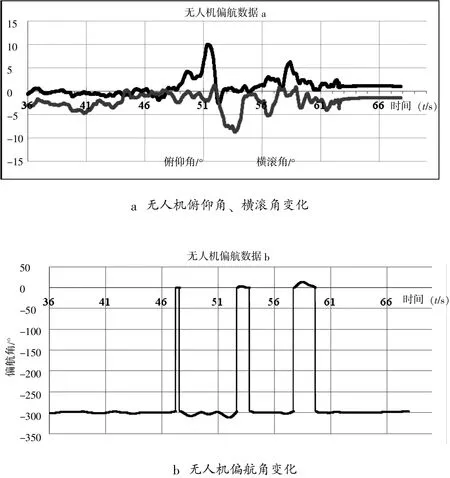
图7 无人机偏航数据
5 结束语
四旋翼无人状态检测系统的设计与样机开发为四旋翼无人机的飞行安全性的提升迈出了实质性的一步。本文以小型四旋翼无人机为研究对象,在四旋翼无人机有限的载荷下利用STM32F42x处理器配合多种传感器实时采集无人机的使用环境、工作状况和部件状态等信息,基于2.4 GHz射频信号将采集到的大量数据实时传回地面站进行监测。应用实例表明,该系统运行稳定可靠,能够有效地监测到四旋翼无人机飞行时的异常状态。
[1]中国电子信息博览会组委会.无人机与个人飞行器产业急速攀升 [J].中国电子商情,2015 (5):42.
[2]谢威.我国民用无人机产业发展对策研究 [J].科技资讯,2016,14(3):99-100.
[3]OLSON I J,ATKINS E M.Qualitative failure analysis for a small quadrotor unmanned aircraft system[C]//AIAA Guidance, Navigation, and Control(GNC)conference,August19-22,2013,Boston,MA,2013:1-11.
[4]CAMERON N,WEBSTER M,JUMP M,et al.Certification of a civil UAS:a virtual engineering approach[C]//AIAA Modeling and Simulation Technologies Conference,August 8-11,2011,Oregon Portland,2011:1-10.
[5]ZHANG K,ZHANG T,LIAO Y,et al.Remote control unmanned aerial vehicle test system based on Labview[J].Transactions of the Chinese Society of Agricultural Engineering,2015,30 (S2):11-16.
[6]徐雪松.四旋翼无人机的多模型故障诊断 [J].计算机工程与应用,2016,52(21):252-257.
[7]李晓辉.无人机状态监控系统开发 [D].青岛:山东大学,2011.
[8]冯东华, 贾海龙.无人飞行器飞控测试中动力故障自主检测系统设计 [J].计算机测量与控制,2014,22(9):2716-2718.
[9]崔强,彭刚锋,徐春荣,等.无人机飞行数据采集系统的设计与实现 [C]//中国航空科学技术大会,北京:2015:539-573.
[10]江哲.基于STM32的四旋翼飞行器的设计与实现 [D].上海:华东理工大学,2015.
