基于免疫粒子群优化的主动悬架LQG控制研究
2018-03-19张玉分龙金莲李婧卢家暄
张玉分,龙金莲,李婧,卢家暄
1.贵州大学电气工程学院,贵阳550025
2.贵州大学大数据与信息工程学院,贵阳550025
基于免疫粒子群优化的主动悬架LQG控制研究
张玉分1,龙金莲1,李婧1,卢家暄2
1.贵州大学电气工程学院,贵阳550025
2.贵州大学大数据与信息工程学院,贵阳550025
1 引言
汽车悬架是传递作用在车轮与车身之间所有的力和力矩,减少冲击力、衰减由路面激励所引起的车身振动,以使汽车平顺地行驶的一种装置[1-2]。主动悬架能与车辆系统自身的运动状况和外部输入变化(路面激励或驾驶员方向盘操作)相对应,主动改变和给出所需控制力,使悬架始终处于最佳衰减振动状态,乘坐舒适性和操作稳定性得以改善[3]。
在主动悬架控制理论研究过程中,学者提出了多种策略,如预见控制[4]、自适应控制[5]、模糊控制[6]和最优控制理论等,最优控制理论虽然较为成熟,且算法简单,但其加权系数矩阵Q和R由于取决于先验知识,结果并非实际最优。PSO算法虽然结构简单、收敛快,优化效果好,但粒子群自身不具备变异能力,随着进化的进行,粒子群算法容易陷入局部极值。然而免疫算法模拟了免疫系统基于浓度抗体繁殖策略,对浓度较大的粒子进行抑制,对浓度较小的粒子进行促进,具有多样性好,变异能力强等优点,使算法逃出局部最优解,获得全局最优解[7]。针对以上问题,本文提出了一种免疫粒子群混合优化算法,免疫算法增强了PSO算法的全局搜索能力,在给定的空间搜索到使性能指标最优的一组LQG权重参数。通过建模仿真,并将优化前后仿真实验结果进行分析,验证了LQG经免疫粒子群算法优化后的可行性。
2 系统模型的建立
通常车辆行驶的左右路面统计特性近似一致,且认为在纵向轴线上,车身只有小幅度的摆动,则可忽略侧倾和横摆运动。本文为了简化控制模型,突出主要的研究内容,将主动悬架系统进行简化如图1所示。

图1 二自由度1/4车模型
依据牛顿定律,系统的运动方程如下[8]:

式中,ms为车身重量;mu为轮胎重量;Ks为弹簧钢度;Kt为轮胎刚度;zs为车身位移;zu为轮胎位移;zr为路面位移;Ua为控制力。
路面输入模型通过滤波白噪声来模拟:

式中,f0为下截止频率;Gq(n0)为路不平度系数;v为悬架速度;q(t)为高斯白噪声且数学期望为零的输入矩阵;n0为参考空间频率。
将主动悬架系统的运动方程与其激励输入方程分别转换成矩阵形式,即可获得悬架系统的空间状态方程:

式中,X(t)为系统状态矢量

W(t)为高斯白噪声输入矩阵,W(t)=[w(t)];U(t)为控制输入矩阵,U(t)=[Ua(t)]。
3 最优控制器的设计
主动悬架最优控制目标是使车辆获得良好的行驶平顺性和操纵稳定性,其物理量反应为降低车身垂向振动加速度、悬架动行程zs(t)-zu(t)和轮胎动位移zu(t)-zr(t)。同时为了降低控制能量的消耗,需对控制力Ua进行约束。线性二次型最优控制通过加权系数,对各性能指标进行综合考虑。

式中,q为加权矩阵,q1、q2、q3、q4为各对应物理量的加权系数。将性能指标J的表达式(4)改写成矩阵形式,即:

反馈增益矩阵K通过MATLAB中LQG函数(K,S,E)=LQR(A,B,Q̂,N,R̂)获得。其中K为最优控制反馈增益矩阵,S为黎卡提方程的解,E为系统闭环特征根。其中

根据任意时刻的状态反馈变量X(t),可得出t时刻的最优控制力Ua(t)。

基于LQG的主动悬架在简单的线性单变量系统中具有较好的控制效果。但是,对于复杂的非线性系统,LQG控制器的参数难以得到合理配置,不能实现在线实时调整,会导致其适应性差,影响系统控制质量。因此,引入免疫粒子群算法对主动悬架LQG控制器进行在线实时优化,以增强其自适应能力。
4 基于免疫粒子群算法的LQG参数优化
4.1 优化设计过程
利用免疫粒子群算法对LQG控制器的参数进行优化设计,其过程如图2。
图2中,IS-PSO算法与Simulink模型是由粒子和该粒子对应的适应值(即控制系统的性能指标)实现连接。有如下的优化流程:IS-PSO按一定的规则生成粒子群(可以是初始粒子群,也可以是更新后的粒子群),生成的粒子群中的粒子与LQG控制器的参数q1、q2、q3具有对等关系,而后对控制系统的Simulink模型进行仿真,获取与该组参数一一对应的性能指标,并将其传递到IS-PSO优化算法中设定为该粒子的适应值,判断是否满足终止条件,若满足则退出该算法。

图2 IS-PSO优化LQG的过程示意图
4.2 粒子群算法
粒子群算法是一种具备进化和有效的群智能的全局寻优算法。在该算法中每个粒子都代表一个潜在解,粒子与由适应度函数决定的适应度值相对应。粒子的速度vid和方向zid按照式(7)进行更新,并通过跟踪粒子自身最优解Pgd和群体最优解Ggd来更新自己[9]。

式中w为惯性权重,η1、η2为速度更新参数,γ1、γ1为0∼1间的随机数。
4.3 免疫算法
免疫算法与遗传算法相似,在其基础上引入了免疫算子,是一种随机启发式算法。免疫算法中,将目标函数视为抗原,将目标函数的优化解视为抗体,目标函数的最基本特征信息视为疫苗,将目标函数以适当的形式转换为免疫算子以实施具体操作。免疫思想主要是提取疫苗,通过接种疫苗和免疫选择两个步骤来完成,前者是为了提高适应度,后者则是防止群体的退化。其中,接种疫苗是对给定的个体按照先验知识来修改个体,使所得个体具有更高适应度的概率较大。免疫选择分为免疫检测即选择较优适应度粒子和基于矢量矩的浓度机制选择即依式(8)概率选择粒子。

其中J(xi)为个体xi的适应度值。
概率选择粒子使进化基因低的适应度个体也可获得繁殖的机会,因此,基于浓度抗体繁殖策略的免疫算法在理论上保证了解的多样性。
4.4 适应度函数的选择
适应度函数是衡量粒子群位置优劣的函数,与粒子的位置成反比。由于适应度函数应求得其最小值,同时目标函数的求取与适应度函数具有相同的变化规律,因此选取目标函数作为粒子全优化的适应度函数[10-12]。由于目标函数中车身垂直振动加速度、悬架动行程、轮胎动位移三个指标的单位和数量级均有差异,因此将其分别与对应的被动悬架的性能指标求商[11]。适应度函数z的公式如式(9)所示:

J1、ACC分别为主、被动悬架车身垂直加速度均方根值;J2、SWS分别为主、被动悬架动行程均方根;J3、DTD分别为主、被动悬架轮胎动位移均方根值。
4.5 免疫粒子群算法的基本原理
基于免疫粒子群算法将免疫系统的浓度抗体繁殖机制引入PSO中,将粒子视为抗原,每一个抗体代表一个最优粒子。抗原与抗体的亲和力由PSO算法中的适应度来衡量,反映了对目标函数以及约束条件的满足程度;抗体之间的亲和力则反应了粒子之间的差异,即种群的多样性[13-15]。
与标准PSO算法相比,免疫粒子群算法主要由以下3个部分组成。
(1)基本的PSO算法,可独立运行,用于控制整个迭代过程。
(2)免疫记忆与自我调节功能的实现,用于保证种群的多样性。
(3)免疫接种的实现,用于提高算法的收敛性能。
其流程图如图3所示。
其具体步骤如下:
(1)初始化粒子群:在允许的范围内随机产生N个粒子的位置及其速度,计算适应度值,得到初始化群体的个体极值和全局极值。
(2)抽取疫苗:即依据全局最优粒子群抽取疫苗。
(3)判断是否满足约束条件:如果迭代次数大于最大粒子迭代次数,就结束运行,输出结果;否则继续。
(4)更新粒子的位置和速度;按式(7)对每个粒子的速度和位置进行更新。
(5)群体的更新:将更新的粒子的适应度与更新前粒子的适应度进行比较,如果适应度值增加,则对粒子的位置进行更新,否则保留原来粒子的位置。
(6)随机产生新的粒子,为了增加全体的多样性,在每次迭代的过程中都随机产生M个新粒子,并计算适应值。
(7)概率选择N个粒子形成新的群体:从(N+M)个粒子中,按式(8)概率选择N个粒子形成新的群体。
(8)接种疫苗和免疫选择:用步骤(2)产生的免疫“疫苗”对群体中的R个粒子进行接种,计算接种疫苗后的粒子是粒子适应度值,并根据适应度值进行免疫选择。如果适应度值减小,则保留该粒子,否则取消疫苗。这样就形成了新一代群体,转移到(2)。

图3 免疫粒子群优化流程图
5 仿真分析
5.1 主动悬架系统仿真
为了更好地分析免疫粒子群混合优化算法对主动悬架的控制效果,将其与粒子群LQG算法进行比较。悬架模型参数见表1,免疫粒子群混合优化的主动悬架LQG控制模型的Simulink实现如图4所示。
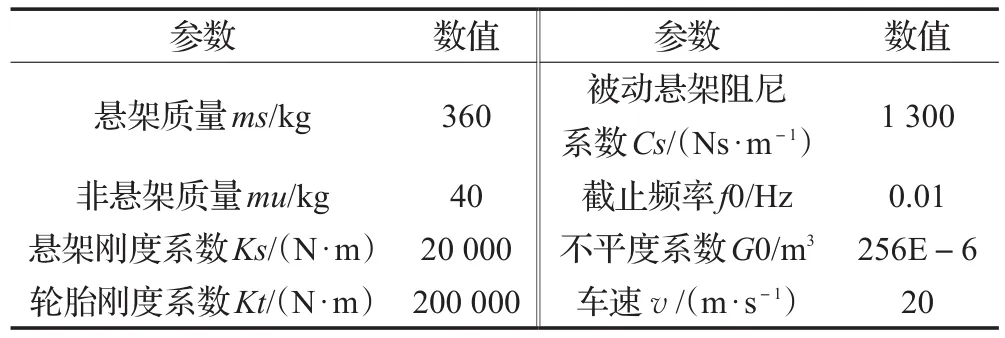
表1 悬架模型参数
5.2 粒子群优化仿真
运用粒子群对LQG控制器的加权系数进行优化,需要优化的q1、q2、q3参数的范围均为0.1~106。算法参数设定如下:粒子群算法的群体规模是100,惯性权重因子是0.6,最大的迭代次数是100,速度更新参数都为2,交叉概率为0.5,变异概率为0.4。目标函数为公式(9),对LQG参数进行优化,得到免疫算法优化前后最优个体的适应度值变化如图5所示。
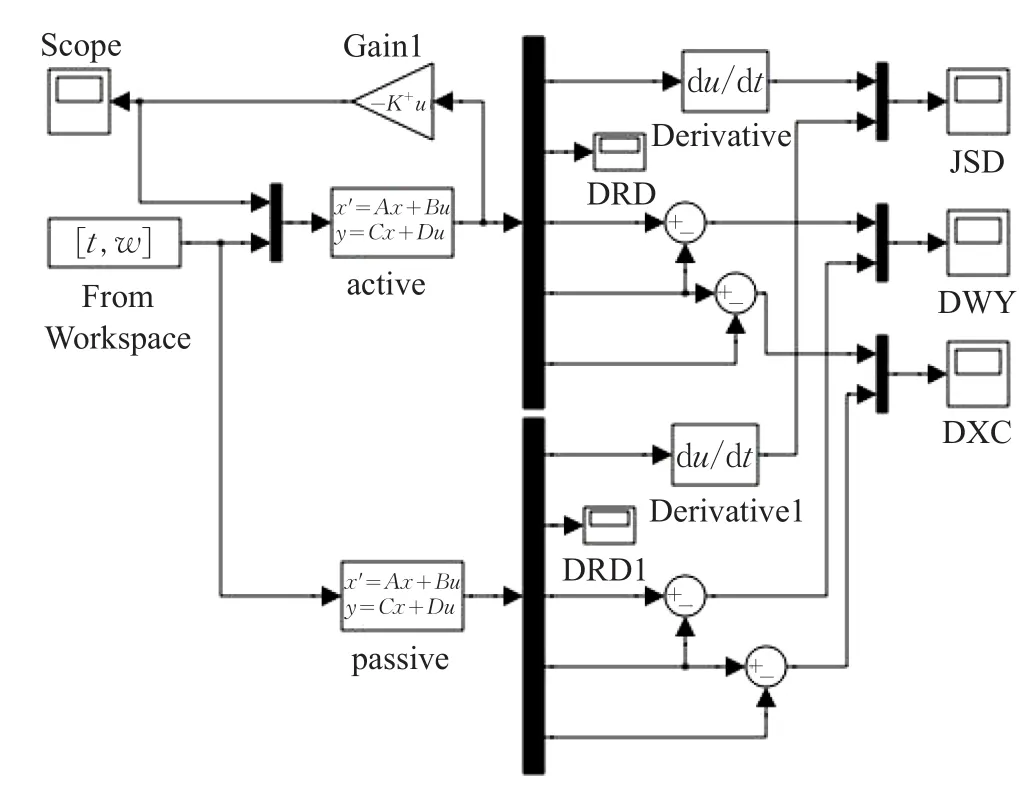
图4 主动悬架LQG控制模型的Simulink实现

图5 免疫算法优化前后收敛曲线
由图5可知,随着种群的不断变化,最优个体的适应度函数值不断减小,最终收敛至2.496,此时对应的最优个体为(q1,q2,q3)=(1 110.65,10 711.053,76 508.625),并将其反馈到主动悬架系统中求出最优控制力。将优化前后的主动悬架的仿真结果进行比较分析,如图6所示。
本文中提出的主动悬架控制和被动悬架系统的仿真结果进行对比,三个不同控制策略下系统悬架性能的比较结果如表2所示。

表2 不同控制策略下悬架性能指标均方根的对比分析
从表2中数据得到在相同的路面激励下,主动悬架的粒子群LQG控制器比被动悬架的控制效果在各方面都有提升,其中悬架垂直加速度减少了31.75%,车身动位移减少了9.23%,轮胎动行程减少了20.20%。这表明采用主动悬架作为控制对象是合理的。而优化的粒子群LQG控制器比优化前的粒子群LQG相比,悬架垂直加速度减少了3.88%,车身动位移减少了1.84%,轮胎动行程减少了6.79%。LQG经优化后使主动悬架主要性能得到了一定程度的提高。

图6 主动悬架PSO-LQG算法优化前后结果图
6 结束语
通过1/4二自由度车辆模型的仿真分析,在C级路面上通过滤波白噪声激励,对免疫粒子群的控制方法进行了验证。结果表明,所提出的免疫粒子群LQG控制方法使振动中悬架垂直加速度、动行程、轮胎动位移这些重要指标得到显著的改善,改善了汽车的平顺性和操纵稳定性,系统的动态性能和稳定性能更接近最优解。
[1] 王洪礼,石磊,刘文革.汽车悬架系统非线性振动的主动控制[J].机械强度,2000,22(3):164-166.
[2] 刘栋,唐焱,顾慧芽.汽车主动悬架控制系统的发展研究[J].液压气动与密封,2010(5):21-25.
[3] 刘少军,饶大可,黄中华.车辆主动悬架系统及其控制方法[J].湘潭大学自然科学学报,2003,25(2):65-69.
[4] 贝绍轶,袁传义,陈龙.基于轴距预瞄的半主动悬架模糊神经网络控制[J].汽车工程,2010,25(12):1067-1070.
[5] 孙晓强,陈龙,汪少华.半主动空气悬架阻尼多模型自适应控制研究[J].农业机械学报,2015,46(3):351-357.
[6] 陈杰平,冯武堂,郭万山.整车磁流变减振器半主动悬架变论域模糊控制策略[J].农业机械学报,2011,42(5):7-13.
[7] 刘道.基于改进粒子群优化算法的PID参数整定研究[D].湖南衡阳:南华大学,2012.
[8] 曹建波.基于SIMULINK车辆主动悬架动态特性及控制的研究[D].西安:西安理工大学,2009.
[9] 黄伟,徐建,朱大勇.基于粒子群优化的动力设备主动振动控制研究[J].合肥工业大学学报:自然科学版,2016,39(4):494-498.
[10] 付涛,王大镇,弓清忠.车辆主动悬架优化设计与仿真分析[J].计算机工程与应用,2016,52(6):253-257.
[11] 邱泽敏,赵慧青.粒子群运动特性下的神经网络目标搜索算法[J].计算机工程与应用,2017,53(18):51-55.
[12] 赵强,白欣.基于粒子群算法优化的车辆主动悬架PID控制[J].森林工程,2017,33(1):66-69.
[13] 王倪.基于免疫PID算法的无线网络拥塞控制优化[J].电脑知识与技术,2017,13(2):44-46.
[14] 张波涛,刘士荣,吕强.采用生物信息克隆的免疫算法[J].控制理论与应用,2010,27(6):799-803.
[15] 陈云芳,王舒雅.免疫算子对种群多样性的影响分析[J].计算机工程与应用,2014,50(20):68-73.
ZHANG Yufen,LONG Jinlian,LI Jing,et al.Research on LQG of active suspension based on immune particle swarm optimization.Computer Engineering andApplications,2018,54(6):252-256.
ZHANG Yufen1,LONG Jinlian1,LI Jing1,LU Jiaxuan2
1.College of Electrical Engineering,Guizhou University,Guiyang 550025,China
2.College of Big Data and Information Engineering,Guizhou University,Guiyang 550025,China
In order to solve the disadvantage that the weight coefficients depend on prior knowledge for the LQG controllerused in the active suspension,an immune particle swarm optimization algorithm is proposed.Firstly,the particle swarm optimization algorithm is used to optimize the parameters and obtain the quasi-optimal parameters as the initial value of online regulation,then the parameters are optimized in real time with the immune particle swarm algorithm.This method is simple,which can maintain the particle diversity and the convergence rate and precocity of PSO in particle swarm and the complexity of the immune algorithm are improved at the same time.The feasibility and validity of the proposed method are verified by simulation.
active suspension;linear quadratic(LQG)controller;immune particle swarm optimization;particle swarm optimization
针对LQG控制器用于主动悬架存在权重系数依靠先验知识来确定的不足,提出了免疫粒子群混合优化算法。该算法首先利用粒子群算法对LQG参数进行离线优化,得到一组准最优LQG参数,将其作为在线调节初始值,然后引入免疫粒子群算法对LQG参数进行在线实时优化。该方法实现简单,在保持粒子多样性的同时也改善了粒子群算法收敛速度慢、早熟以及免疫算法过程繁复冗长。仿真验证了所提方法的可行性与有效性。
主动悬架;线性二次型(LQG)控制器;免疫粒子群混合优化算法;粒子群算法
2017-09-19
2017-11-14
1002-8331(2018)06-0252-05
A
U463
10.3778/j.issn.1002-8331.1709-0270
国家自然科学基金(No.51567005)。
张玉分(1990—),女,硕士,主要研究领域为电力电子信息技术;龙金莲(1990—),女,硕士,主要研究领域为电力电子信息技术;李婧(1990—),女,硕士,主要研究领域为电力系统电能质量;卢家暄(1974—),通讯作者,女,副教授,硕士研究生导师,主要研究领域为电力电子信息技术。