倒立摆线性二次型最优控制方法研究
2018-03-19夏浩军邱荣华
夏浩军,邱荣华
(1. 杨凌职业技术学院,陕西 杨凌 712100; 2. 西安工程大学,陕西 西安 710048)
0 引言
倒立摆系统为不稳定、多变量和非线性的高阶系统[1],其稳定控制存在诸多问题,表现为系统参数的不确定性及系统受到不确定因素干扰[2]。近年来,国内外学者针对倒立摆系统控制方法进行了大量研究,使倒立摆控制方法广泛用于军工、航天、机器人领域和一般工业过程中,如精密仪器加工、机器人平衡控制、火箭垂直度控制、导弹拦截控制、航空对接及卫星姿态控制等方面[3]。相关研究在倒立摆系统控制的快速性和稳定性等方面仍存在一些问题,如导弹拦截快速性和准确性问题、机器人平衡控制的稳定性等问题,需进一步改进和完善,以实现倒立摆系统的最优控制。
有关倒立摆系统控制的研究成果主要集中在模型和控制方法等方面,LB Prasad等[4]先后应用线性化方法及最优状态调节器理论,分析了二级倒立摆控制方法;ME Mousa等[5]探讨了LQR (linear quadratic regulator)倒立摆系统控制理论问题,李雪冰等[6]应用智能控制理论研究了二级倒立摆系统的控制方法;唐永川等[7]针对二级倒立摆系统稳定控制问题,分析了系统起摆和控制方法;黄彦海等[8]研究了单级倒立摆动平衡姿态控制问题;陈富国等[9]对三级倒立摆进行了仿真和实验研究;韩锋等[10]探讨了应用变步长预测控制实现系统实时非线性控制方法,并对二级倒立摆的起动及稳定控制进行了仿真分析;郭丙君等[11]建立了多级旋转倒立摆动力学模型,为研究倒立摆最优控制方法奠定了理论基础。
由于倒立摆在实际应用中可做线性化处理,得到系统近似线性模型,应用LQR线性二次型调节器可得状态反馈的最优控制规律。故本文首先建立单级倒立摆系统线性化状态空间模型,并设计LQR线性二次型状态反馈调节器,优化系统响应速度和稳定性,实现单级倒立摆的最优控制。
1 单级倒立摆线性模型
若忽略空气阻力等影响因素,可将单级倒立摆简化为小车和匀质杆模型[12],如图1所示。单级倒立摆中,小车由丝杠传动,其顶端通过铰链连接摆杆;小车沿水平轨道左右运动,同时摆可在垂直平面内自由运动。
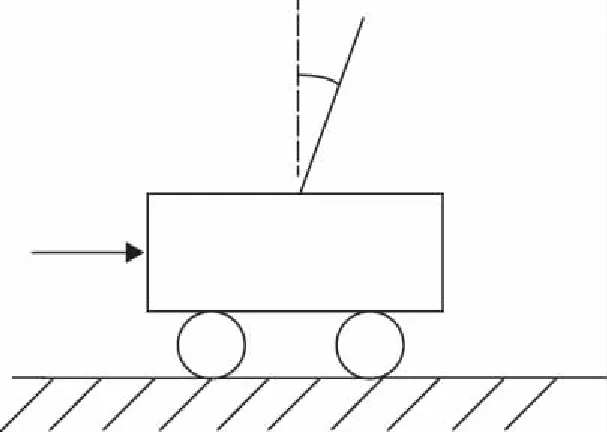
图1 单级倒立摆结构示意图
摆杆及小车都是刚体,采用丝杠传动方式。小车所受摩擦力正比于小车运动速度,摆杆运动时所受摩擦力矩正比于下摆转动速度。本文单级倒立摆参数如表1所示。
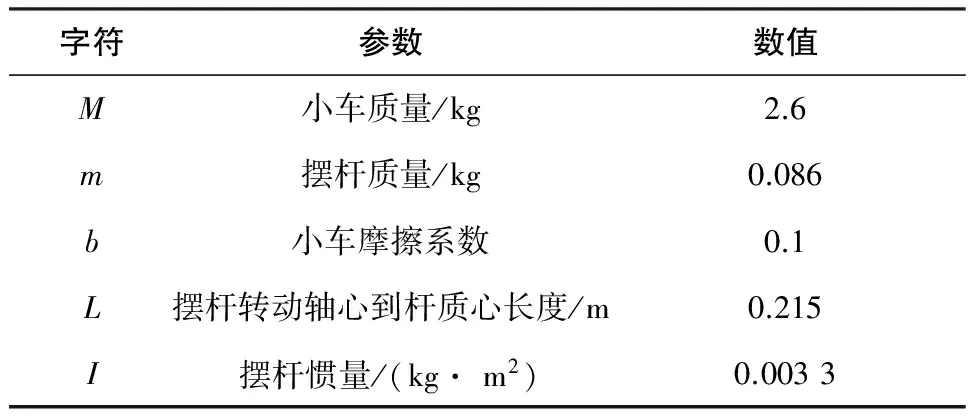
表1 单级倒立摆参数



图2 单级倒立摆系统受力分析图
分析图2(a)、图2(b)中小车和摆杆水平方向受力,可得小车运动方程为:

(1)
根据图2(b)摆杆竖直方向受力,可得摆杆运动方程为:

(2)
若图2(b)中,摆杆与竖直方向夹角φ<<1(rad),则:cosθ=-1,sinθ=-φ,(dθ/dt)2=0。用u表示被控对象的输入力F,对式(1)和式(2)线性化,得:
(3)
由式(3)得单级倒立摆位移x、角度φ的解。
对质量均匀分布的摆杆有:
(4)
由式(3)可得:
(5)

(6)


(7)
2 LQR最优控制系统设计
2.1 倒立摆控制要求
应用LQR状态反馈法设计倒立摆控制器,当在小车上作用0.2m阶跃信号时,闭环控制系统的响应指标为:摆杆角度φ和小车位移x的稳定时间<5s,位移x的上升时间<1s,超调量<0.35rad,稳态误差<2%。
2.2 LQR控制器


图3 系统控制框图
假设全状态反馈可以实现(4个状态量均可测),需确定反馈控制规律的向量K。应用Matlab软件中的LQR函数,可得最优控制器的向量K。LQR函数可选择2个参数R和Q,这2个参数用于平衡系统对输入量和状态量的敏感程度[13]。
若Q取为对角阵,表示为:
设:
R=[r]
则系统性能指标泛函为:
(8)

对于单级倒立摆系统,被控量为输出x和φ,由于Q11表示小车位置敏感程度,Q22表示摆杆敏感程度,R表示输入敏感程度[15]。若r=1,在选取对角阵Q的各元素时,可取Q11、Q22,Q33=Q44=0。
3 控制系统仿真
在Matlab软件中,由单级倒立摆线性模型式(7)和目标泛函式(8),应用LQR函数编写控制系统m程序[16]。当取Q11=0、Q22=0时,调用LQR函数得:
K=[-0.863 7 -2.350 5 -54.669 4 -7.936 8]
则LQR控制系统阶跃响应如图4所示。
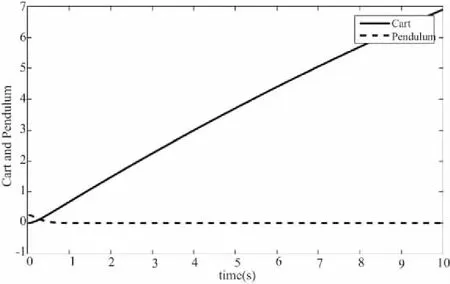
图4 LQR控制系统阶跃响应
由图4可知,小车位移连续增大,响应时间不满足要求,不符合设计指标,故需调整控制器参数。
取Q11=1、Q22=1,调用LQR函数得:
K=[ -0.869 3 -2.390 9 -55.869 9 -8.498 8]
则系统阶跃响应如图5所示。

图5 系统阶跃响应曲线
图5中,小车阶跃响应上升时间>1s,不符合设计要求,需继续调整控制器参数。
取Q11=200、Q22=400,调用LQR函数得:
K=[-11.860 0 -11.421 7 -78.934 7 -11.273 5]
此时系统阶跃响应曲线如图6所示。

图6 控制系统阶跃响应
图6中,小车阶跃响应上升时间<1s,调节时间<5s,超调量为0.25rad,小于设计目标值 0.35rad,系统性能指标满足要求,LQR状态反馈控制器达到设计要求。
应用Matlab中GUI工具箱,对倒立摆LQR状态反馈控制系统进行动态仿真,可进一步验证本文设计方法的有效性。使用GUI工具箱建立倒立摆物理模型,系统参数按表1取值,设小车初始水平位置为0,摆杆角度为0.15rad。控制器参数设定为:Q11=8、Q22=8和R=1。利用LQR设计方法,计算得控制器增益K=[-65.790 5 -8.364 98 -2.828 43 -5.548 15 ];设定仿真时间为10s,步长0.1。启动仿真得GUI动画演示仿真图,系统动态仿真结果如图7所示。

图7 GUI动态仿真图
动态仿真结果显示,小车和摆杆运动状态、响应时间与解析模型仿真结果一致,证明本文线性二次型最优控制方法有效。
4 结语
1) 对单级倒立摆进行动力学分析,建立了倒立摆线性状态空间模型。
2) 分析了倒立摆系统最优控制性能指标泛函,在Matlab中应用LQR函数设计了线性二次型状态反馈控制器。
3) 分析了倒立摆控制系统阶跃响应指标,优化状态反馈控制器参数,并应用Matlab GUI开发工具完成系统动态仿真。结果表明,本文设计的线性二次型状态反馈控制系统,阶跃响应上升时间<1 s,调节时间<5 s,实现了单级倒立摆快速、稳定控制。
[1] 蒲建波,彭晓乐,尹彦东,等. 倒立摆控制方法的比较研究[J]. 工业仪表与自动化装置,2016(2):11-15.
[2] Y Zhang,Z Miao,H Li,et al. Stabilising the triple inverted pendulum by variable gain linear quadratic regulator [J]. International Journal of Systems Control & Communications,2012,4(4): 208-223.
[3] 尹逊和,樊雪丽,杜洋,等. 二级直线倒立摆系统的实物控制[J]. 计算机工程与应用,2016,52(20):242-250.
[4] LB Prasad, B Tyagi, Ho Gupta. Optimal control of nonlinear inverted pendulum dynamical system with disturbance input using PID controller & LQR [J]. IEEE International Conference on Control System, 2011:540-545.
[5] ME Mousa, MA Ebrahim, MAM Hassan. Stabilizing and Swinging-Up the Inverted Pendulum Using PI and PID Controllers Based on Reduced Linear Quadratic Regulator Tuned by PSo [J]. International Journal of System Dynamics Applications,2015,4(4): 52-69.
[6] 李雪冰,马莉,丁世宏. 一类新的二阶滑模控制方法及其在倒立摆控制中的应用[J]. 自动化学报,2015,41(1):193-202.
[7] 唐永川,刘枫,祁虔,等. 平面倒立摆系统的自校正仿人协调控制[J]. 西南大学学报,2013,35(10):94-104.
[8] 黄彦海,张镭,张朋朋,等. 单级倒立摆模糊控制研究[J]. 制造业自动化,2015,37(1):1-3.
[9] 陈富国,邓冠男,谭彦华. 一种改进的三级倒立摆变论域模糊控制器设计[J]. 控制理论与应用,2010,27(2):233-237.
[10] 韩锋,闻新. 基于Simulink的单级倒立摆的参考模型控制仿真研究[J]. 工业控制计算机,2016,29(8):72-73.
[11] 郭丙君. 倒立摆的串级控制系统设计[J]. 科技世界,2016(7):151-152.
[12] 贾欣乐. 倒立摆分段控制方法[J]. 控制工程,2016,23(10):6-12.
[13] 于昊天,时宝. 非线性系统分数阶滑模控制分析与设计[J]. 海军工程学院学报,2016,31(4):407-414.
[14] 朱秋国,伍浩贤,吴俊,等. 基于三连杆动力模型的仿真机器人站立平衡控制[J]. 机器人,2016,38(4):451-457.
[15] 王来志,杨雨浓. 一级旋转倒立摆及其控制装置的研究与实现[J]. 西南师范大学学报,2016,41(8):145-150.
[16] 姜洪发. 基于MATLAB的倒立摆最优控制设计和仿真[J]. 智能机器人,2016(10):47-50.
