基于霍尔位置传感器的永磁同步电机方波启动问题研究
2018-03-16钟逸飞孔武斌曲荣海
钟逸飞,孔武斌,易 磊,曲荣海
基于霍尔位置传感器的永磁同步电机方波启动问题研究
钟逸飞,孔武斌,易 磊,曲荣海
(华中科技大学电气与电子工程学院,武汉 430074)
针对基于霍尔位置传感器的永磁同步电机启动不稳定的情况,本文提出了永磁同步电机180°方波电流启动,高速后切换到正弦波电流方法。以STM32F103为核心主控芯片,搭建硬件系统和软件算法,实验结果表明本控制策略能够实现满载启动和加速过程,电机运行平稳。
永磁同步电机 霍尔位置传感器 方波启动
0 引言
永磁同步电动机具有质量轻、结构较简单、体积小、特性好、功率密度大等优点,在各种高性能场合的应用日益广泛[1]。相对于无刷直流电机的方波控制,永磁同步正弦电流驱动产生的转矩波动小,效率高。精确的位置信号对于正弦波驱动特别重要,然而光电编码器、磁编码器等精确度越高的位置传感器成本越高,而成本更低的无位置传感器法算法复杂,位置检测精度不高,带载启动困难。因此使用兼顾成本低、体积小的霍尔位置传感器,再加上位置估算算法是一个很好的方案。
霍尔位置传感器,每个电周期只能提供6个离散的转子位置信号,不能直接满足正弦波驱动的要求。采用角度细分的位置估算方法,在起动阶段,由于速度偏低,计数器有可能溢出,因此估算将很不准确,甚至出现不能启动的状况。
本文提出的永磁同步电机启动时采用180°电流驱动方式,待电机转速上升到一定程度再切入正弦电流驱动的方法,既降低了成本,又解决了启动和低速运行的问题。
1 转子位置估算方法


图1三相霍尔安装位置示意图
在软件程序设计中,会将三路霍尔信号异或,异或后的霍尔信号如图2所示。其每个上升沿和下降沿时刻都会触发定时器中断,在每个中断里面会计算转过60°电角度定时器产生多少个脉冲,由此计算出经过一个扇区的时间。霍尔信号上下沿触发中断服务子程序包括读取霍尔信号判断电机转子所在的扇区、位置估算、位置校正等。
位置估算原理如图3所示。


为扇区内平均速度,和分别为扇区、所用时间,为采样周期,为采样次数,,,分别为低分辨率位置信号。因此根据公式(2)可以估算出电机运转时转子的精确位置。
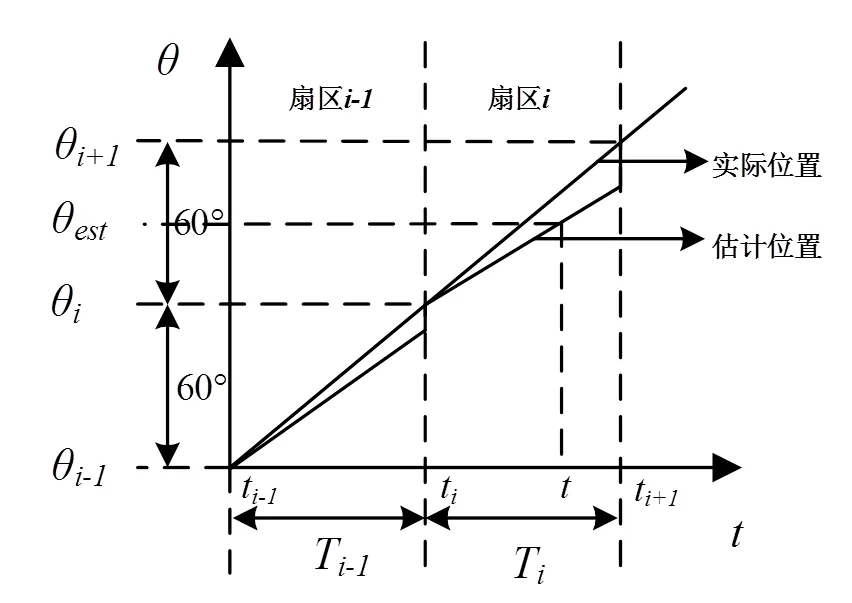
图3 转子位置估算算法示意图
2 启动方法
由于位置的估计是建立在对离散霍尔时间间隔的计算,在复杂工况下,尤其是在起动阶段, 由于速度偏低,计数器有可能溢出,因此估算将很不准确[2]。如果我们再根据前一60°电角度转过的速度来计算当前位置信号,则很难正确地反映当前的转子位置,在某些低速大扭矩场合会存在起动不成功的问题[3],因而有必要在起动阶段采用方波启动的方式。
方波启动包括两种:120°和180°电流驱动方式。其中180°电流驱动方式谐波含量小,转矩脉动小因而电机噪声小。而120°电流驱动方式通过霍尔位置传感器的输出信号确定转子位置,其控制简单,出力大,但转矩脉动和噪声较大[4]
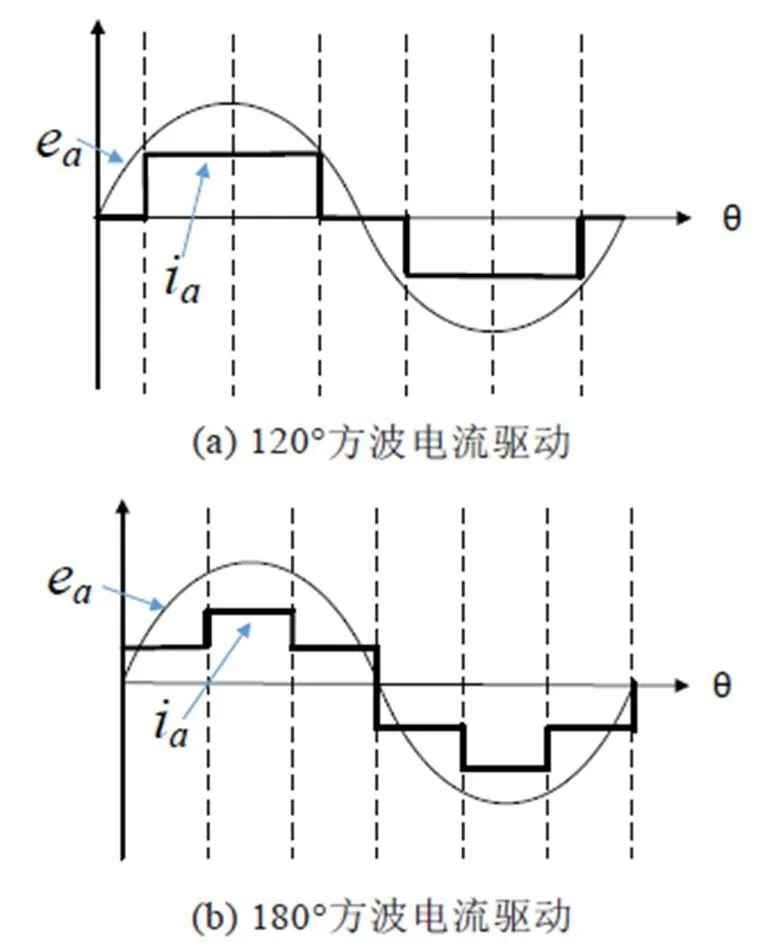
图4 方波电流启动方式
图a为120°电流驱动方式,二二导通方式,两两导通是指任意时刻电机两相导通,第三相悬空。一个电周期有 6 种导通状态,每个状态中只有两个开关管导通,每 60°完成一次换相,换相点在反电势平顶处,每个开关管导通 120°。
本文采用图b所示的180°电流驱动方式,三三导通方式,三三导通是指任意时刻电机三相均导通,同两两导通相比,也是每60°完成一次换相,也有6种导通状态。但每个状态任意时刻有三个开关管导通,每个开关管导通时间为180°,换相点在反电势过零点[5]。根据霍尔元件检测到转子所在的扇区,启动时默认转子位置在扇区的中线上,所以启动转子误差最大为±30°。在电机定子绕组中通入电流使得产生的定子磁场超前转子位置 120°电角度,这样的磁场持续导通转子扫过60°电角度的时间。即当下一次霍尔变化时,才将磁场方向再提前 60°,电角度每隔60°更新一次,使得定子磁场与转子磁场夹角在60°到120°范围中变化,根据离散角度信息执行矢量控制算法,通过 SVPWM 调制计算出合成作用电压矢量,因而保证电机平稳运行。
当电机达到一定转速时,这时转子位置可以连续较为准确地估算出来, 从180°电流驱动方式切换为正弦电流矢量控制,从而较好解决了低速起动脉动很大,甚至失步的问题。
3 驱动系统设计
本研究所设计的电机控制系统框图如图5所示,有蓄电池、三相全桥逆变电路、永磁同步电机、驱动电路、信号调理电路、霍尔位置传感器、霍尔电流传感器组成。同时控制系统核心选择 STM32F103芯片,整个驱动电路简洁明了。
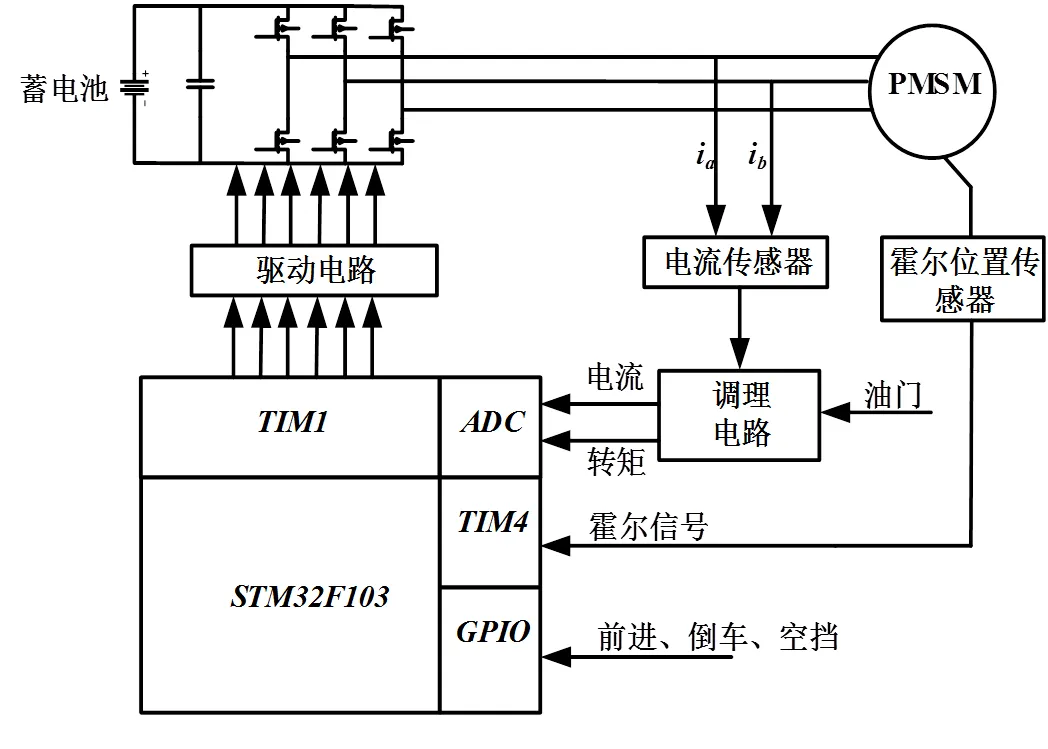
图5 永磁同步电机控制系统框图

4 实验结论
本文对一台装有三相霍尔位置传感器的永磁同步电机进行实验,电机主要参数为:额定功率2.8 kW,额定电压60 V,额定转速2500 rpm,额定转矩10.7 Nm,极对数为4,转速150 rpm设为切换点。控制器开关频率为10 kHz。控制器和电机测试平台如图8所示。
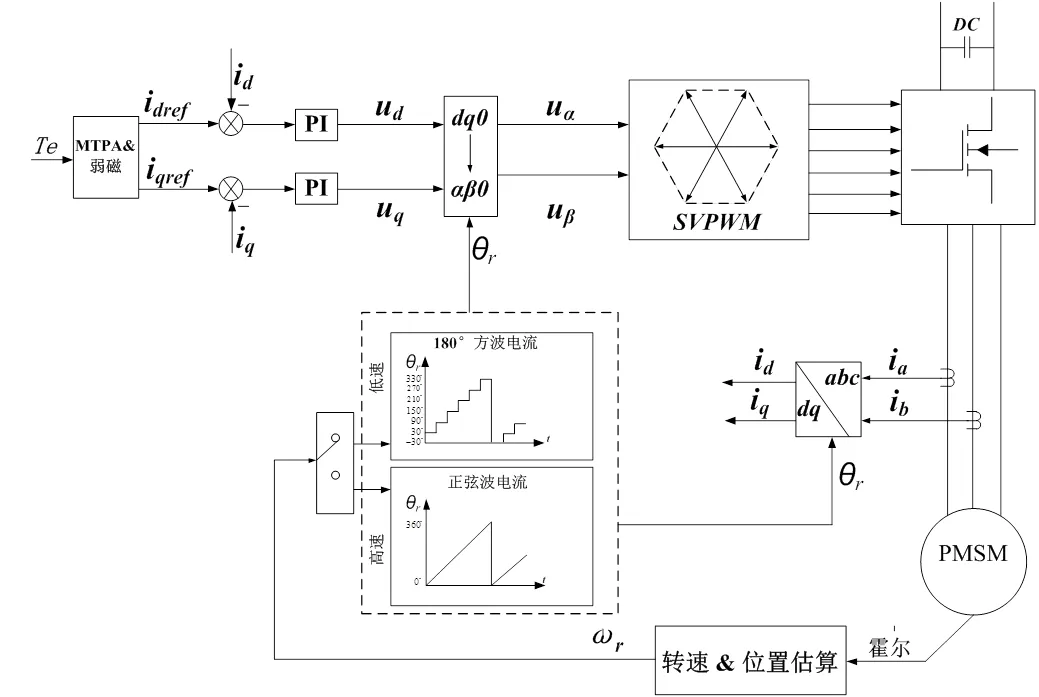
图6 永磁同步电机控制策略图

图7 软件控制流程图
图9为用一台伺服电机拖动实验所用永磁同步电机得到的反电势和霍尔位置信号。说明实验所用电机霍尔位置传感器安装位置与本文转子位置估算理论部分描述一致。
图10为采用i=0的控制方式控制实验电机的启动过程中的电流波形、位置信息、霍尔信号。定子电流i指令由外部油门踏板给定,电机负载5 Nm。图中启动电流为180°导通模式,当转速较高后切换至正弦波电流驱动。启动过程转子位置信号从离散的信号切换到连续信号,实现了低速到高速的平缓切换。而角度位置信号与和霍尔信号Hcba相对应,当转子逆时针方向旋转,每个电周期随着转子从0°转到360°,霍尔信号Hcba会依照3-2-6-4-5-1变化,顺时针相反。
图11为带额定负载11 Nm启动的电流波形与位置信号波形。启动正常,启动时电流最大会达到130 A,速度起来后会稳定在56 A左右,电流正弦度高,说明采用这种启动方法,可以较好的让永磁同步电机正常启动运行。

图8 电机测试平台与控制器
4 结语
本研究考虑基于霍尔传感器永磁同步电机启动困难的问题,提出了低速方波电流启动,高速切换正弦波电流的方法,并用实验验证了180°方波启动的可行性,在带载情况下切换平滑,具有实用价值,并且具有很大的市场竞争力。

图9 三相霍尔信号与反电势波形
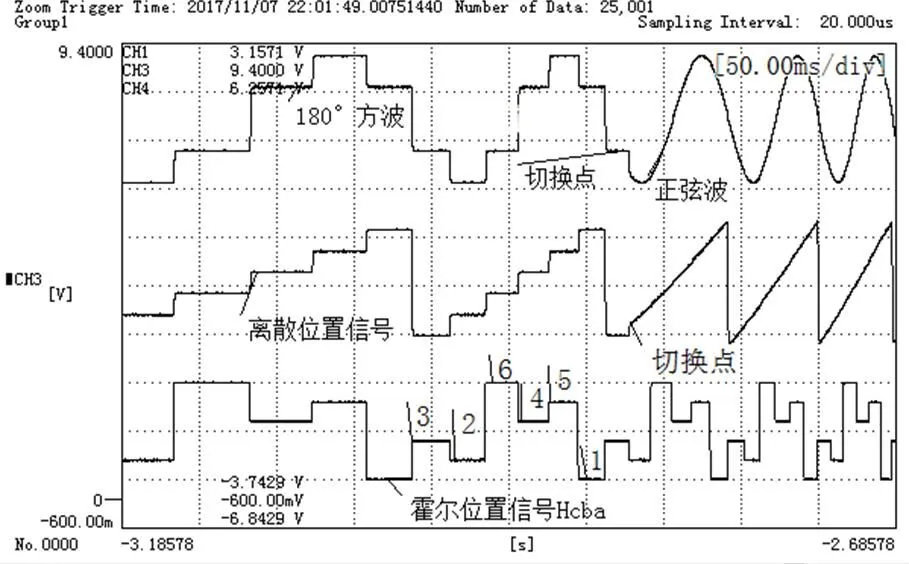
图10 启动过程电流波形、位置信息、霍尔信号

图11 额定负载启动电流与位置信号波形
[1] 王建设, 徐荣, 孙友增. 永磁同步电动机发展现状综述[J]. 科技与创新, 2016,(16):5-6.
[2] 房森林, 章跃进. 基于离散位置信号的永磁同步电动机空间矢量控制[J]. 微特电机, 2010, 38(07):51-53+56.
[3] 荀倩, 吴勇, 王培良, 蔡志端. 霍尔位置传感器无刷直流电机起动控制策略[J]. 中国测试, 2016,42(08):118-122.
[4] 曾风平, 郑成勇, 章跃进. 基于开关型霍尔位置传感器的永磁同步电动机正弦波驱动[J]. 微特电机, 2010, 38(08):56-58+71.
[5] 易磊. 轻型电动汽车用永磁同步电机驱动系统研究 [D]. 硕士学位论文:华中科技大学, 2016.
Square Wave Start-up Control of Permanent Magnet Synchronous Motor with Hall-effect Sensors
Zhong Yifei, Kong Wubin, Yi Lei, Qu Ronghai
(School of Electrical and Electronic Engineering, Huazhong University of Science and Technology, Wuhan 430074, China)
TM341
A
1003-4862(2018)01-0026-04
2017-10-15
钟逸飞(1994-),男,硕士。研究方向:永磁同步电动机驱动控制。
