多目标水平井轨道设计方法研究
2018-03-16党文辉罗科海陈伟峰蒋振新
党文辉,罗科海,罗 增,陈伟峰,熊 超,蒋振新
1中石油新疆油田分公司工程技术研究院,新疆 克拉玛依
2西部钻探克拉玛依钻井公司,新疆 克拉玛依
1. 引言
所谓多目标水平井是指在水平段内至少实现两次上调或下降趋势的井眼轨迹变化,其形状类似于“波浪”。多目标水平井实现了一口井开发两个或多个连续薄油层、层叠状油层、断块油层等,相当于2口甚至2口以上水平井的开发效果[1],可节约成本,提高单井产能和采收率,取得显著的经济效益。
然而,多目标水平井需贯穿多个目标层,其设计目标不再是一个简单的水平段,而是由多个控制点或目标段构成,设计时需要限定着陆点的位置及方向才能确保沿其后的多个目标进行钻进,因此,对井眼轨道的设计提出了更高的要求。
针对以上多约束条件下的三维轨道设计问题,国内外学者对其进行研究并取得了一定成果,提出了求解非线性方程组等解决方法,但这些方法设计麻烦,不便于应用[2]。迄今为止,国内尚未形成一套多目标水平井轨道设计方法和专用设计软件,限制了该技术在国内的进一步发展和应用。本研究旨在寻求一种适合多目标水平井轨道设计的新方法,以满足现场需要。
2. 设计模型
目前,关于二维井眼轨道设计的研究已较为成熟,因受复杂地质条件限制,多目标水平井轨道一般为三维设计问题。基于空间圆弧轨道理论,建立了通用的三维点目标和线目标设计模型[3]。
2.1. 点目标设计模型
三维点目标设计模型如图1所示,靶点T为设计的目标,设计轨道由直线段OA,圆弧段S1和直线段BT组成。设计变量包括直线段长度(分别为L1、L2)和圆弧曲率K,设计时,可令L1或L2为0,以组成不同的轨道类型。
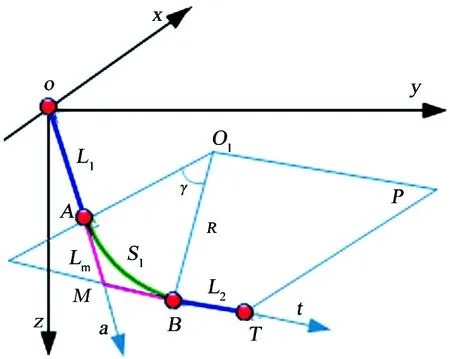
Figure 1. The design model for multi-control point horizontal wells图1. 多控制点水平井点目标设计模型
令|OA| =L1,|BT| =L2,圆弧切线长|AM| = |BM| =Lm,由矢量分析及空间几何关系求得:

式中:NT、ET、HT分别为靶点T北坐标、东坐标和垂深,m;NA、EA、HA分别为A点的北坐标、东坐标和垂深,m;γ分别为圆弧AB的圆心角,(˚);R分别为圆弧AB曲率半径,m。la、ma,、na分别为设计起点单位方向余弦,1。
由式(1)、(2)、(3)求得:
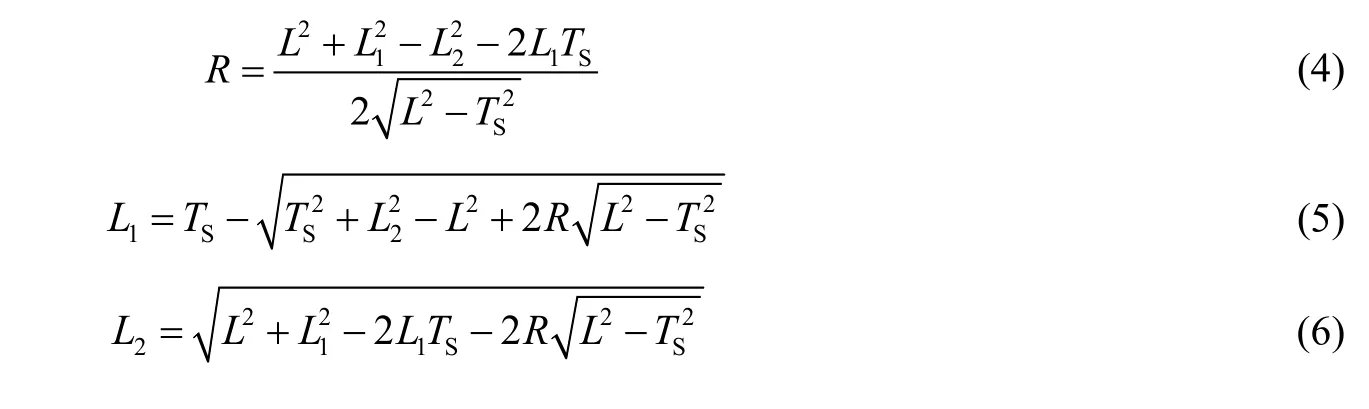
式(4)、(5)、(6)为点目标设计模型约束方程,由设计变量中任两个可解析求得另一个变量,从而唯一确定三维空间设计轨迹。
2.2. 线目标设计模型
线目标设计模型如图2所示,靶区DT为目标段,轨道由直线段OA、圆弧段S1、直线段BC、圆弧段S2和直线段DT组成。设计变量为直线段长度(分别为L11、L22、L33)及圆弧段S1和S2的井眼曲率K1、K2,设计过程中根据实际需要可令直线段为0或K1=K2。
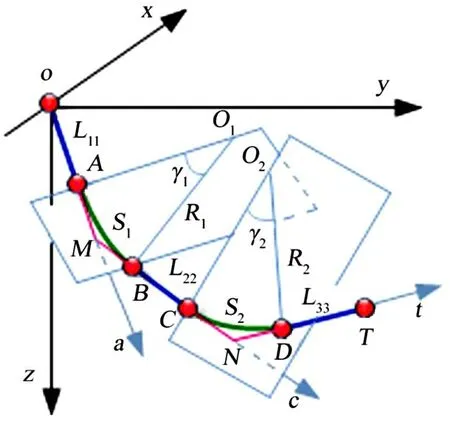
Figure 2. The design model for multi target-control points and lines图2. 多目标点控制点线目标设计模型
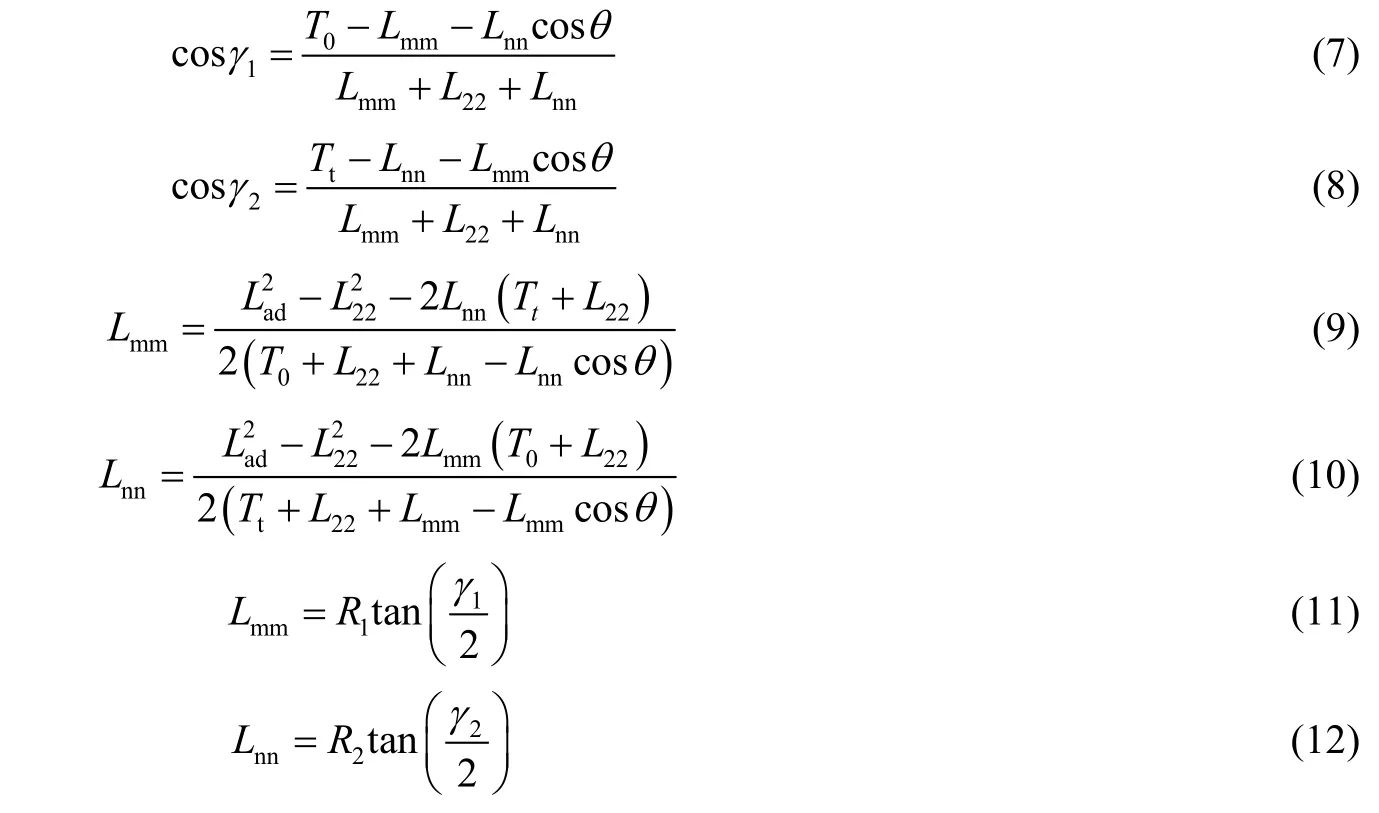
式中:Lad为AD两点距离,m;T0、Tt分别为AD在矢量a、t上的投影长度,m;θ为a、t之间的夹角,(˚);γ1、γ2分别为圆弧AB和CD对应的圆心角,(˚);R1、R2分别为圆弧AB和CD的曲率半径,m。
文献[2]给出了该模型的求解方法,可求得模型的精确解。
3. 设计方法
在复杂地质结构及油藏条件下,目标层通常出现起伏、倾角走向及厚度的变化,甚至出现断层等,因而其设计目标变得更为复杂。目标通常是三维的,且由多个目标组成,同一目标不再是由简单的水平段组成,由多个折线段或一系列控制点来描述,如图3所示。

Figure 3. The schematic diagram of target trajectory design图3. 目标轨道设计示意图
3.1. 目标段轨道设计
对于折线靶(目标段由多个直线段组成)如图3(a),两直线段间采用圆弧过渡,通常限定工具的造斜率,可确定出目标段井眼轨道。
当目标中的控制点相距较近时,设计轨道必须穿越所有控制点时,可应用点目标设计模型,如图3(b),控制点间采用圆弧/直线、圆弧 + 直线或直线 + 圆弧来连接,其设计难度大,设计轨道不唯一。设计原则应确保井眼曲率小于允许的工具造斜能力,并根据摩阻、施工难易程度等综合考虑,优化目标段轨道。
1) 2个目标点间的轨道设计。当目标段只有2个目标点时,直接用直线来连接目标点,如普通的水平井。
2) 3个目标点的轨道设计。当目标段只有3个目标点且不在同一直线上时,可采用图4所示的3种方法进行设计。
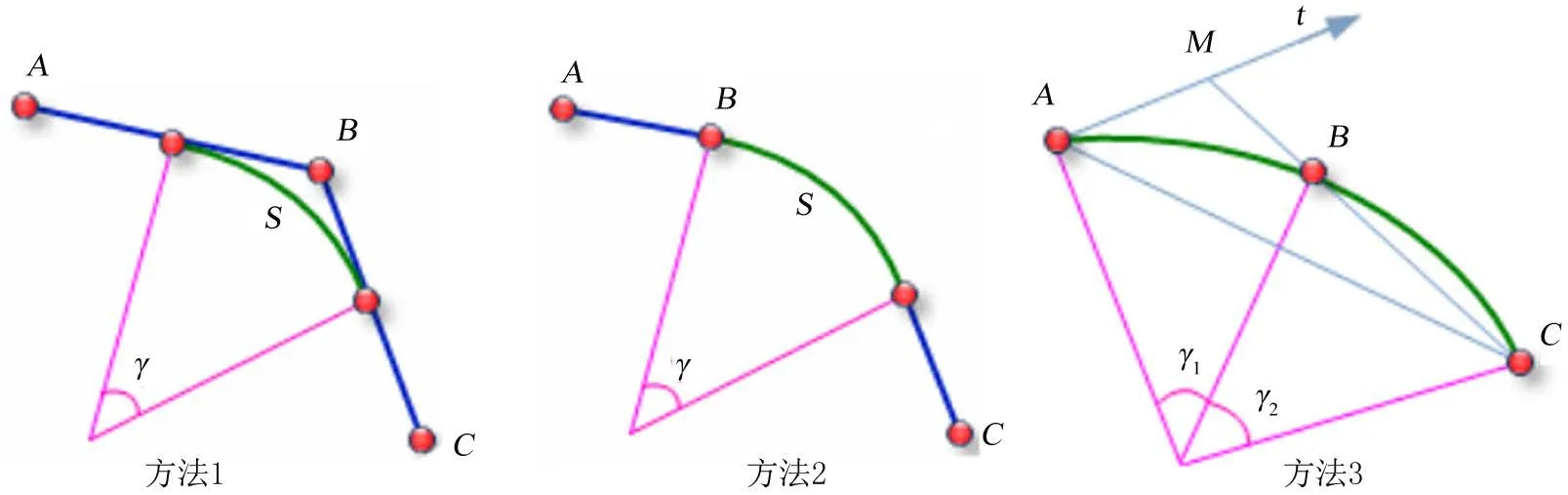
Figure 4. The design method of three target point trajectory图4. 三目标点轨道设计方法
方法1:不过中间点B,用圆弧来连接两折线段,给定圆弧曲率,即可确定目标段轨道。
方法2:前两点用直线连接,再用“圆弧 + 直线”设计到第3控制点,可用点目标模型进行设计。
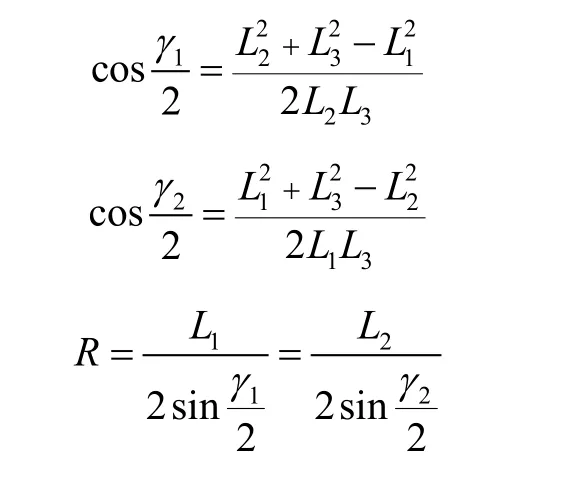
方法3:不在同一直线上的三点可确定一空间斜平面,根据三点定圆确定目标段曲率。设计L1= AB,L2= BC,L3= AC,则可求得[4]:
3) 4个目标点以上的轨道设计。可直接应用点目标设计模型来穿越全部控制点。
3.2. 目标间轨道设计
目标间的轨道设计,可用矢量目标模型来设计。视其空间位置和距离来采用相等曲率半径的两圆弧段或“圆弧 + 直线 + 圆弧”模型来设计。
3.3. 着陆前轨道设计
对于多目标控制点水平井,着陆点的位置和方向均有严格限制,应用三维线目标设计模型设计或优化出着陆前的井眼轨道。
4. 应用实例
基于以上模型,开发了多目标控制点水平井井眼轨迹设计软件,并设计了一口多目标水平井 A,井眼轨迹垂直平面图如图5所示。该井地理资料及靶区数据如表1和表2所示。该井口坐标x= 2,056,500.00 m;y= 5,163,024.00 m。
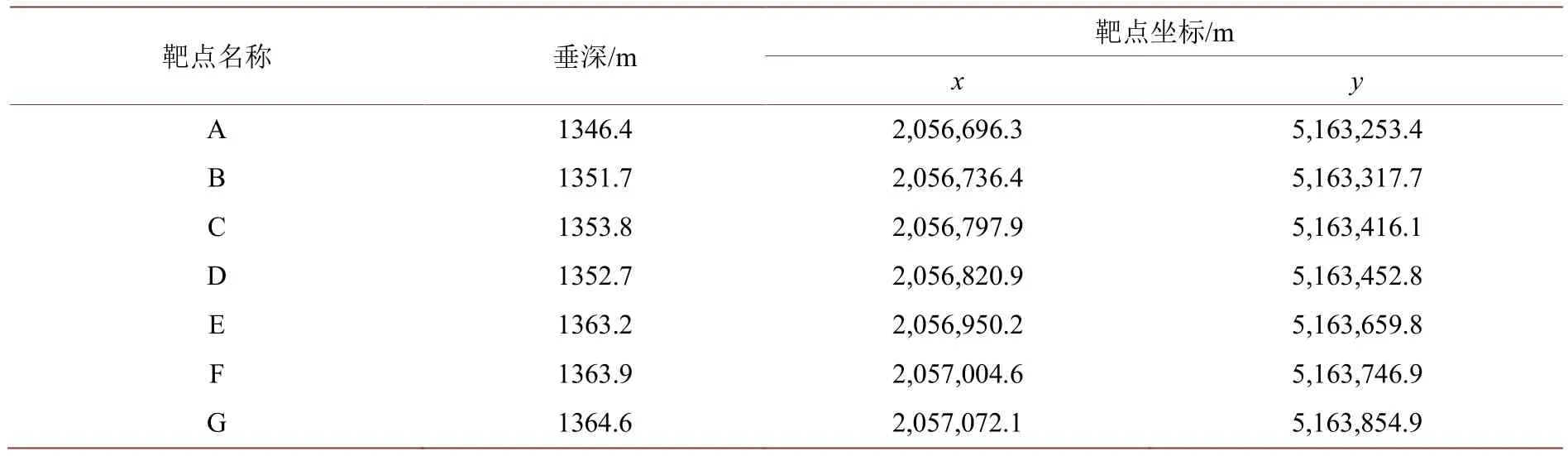
Table 1. The data of target design for Well A表1. A井靶点设计数据
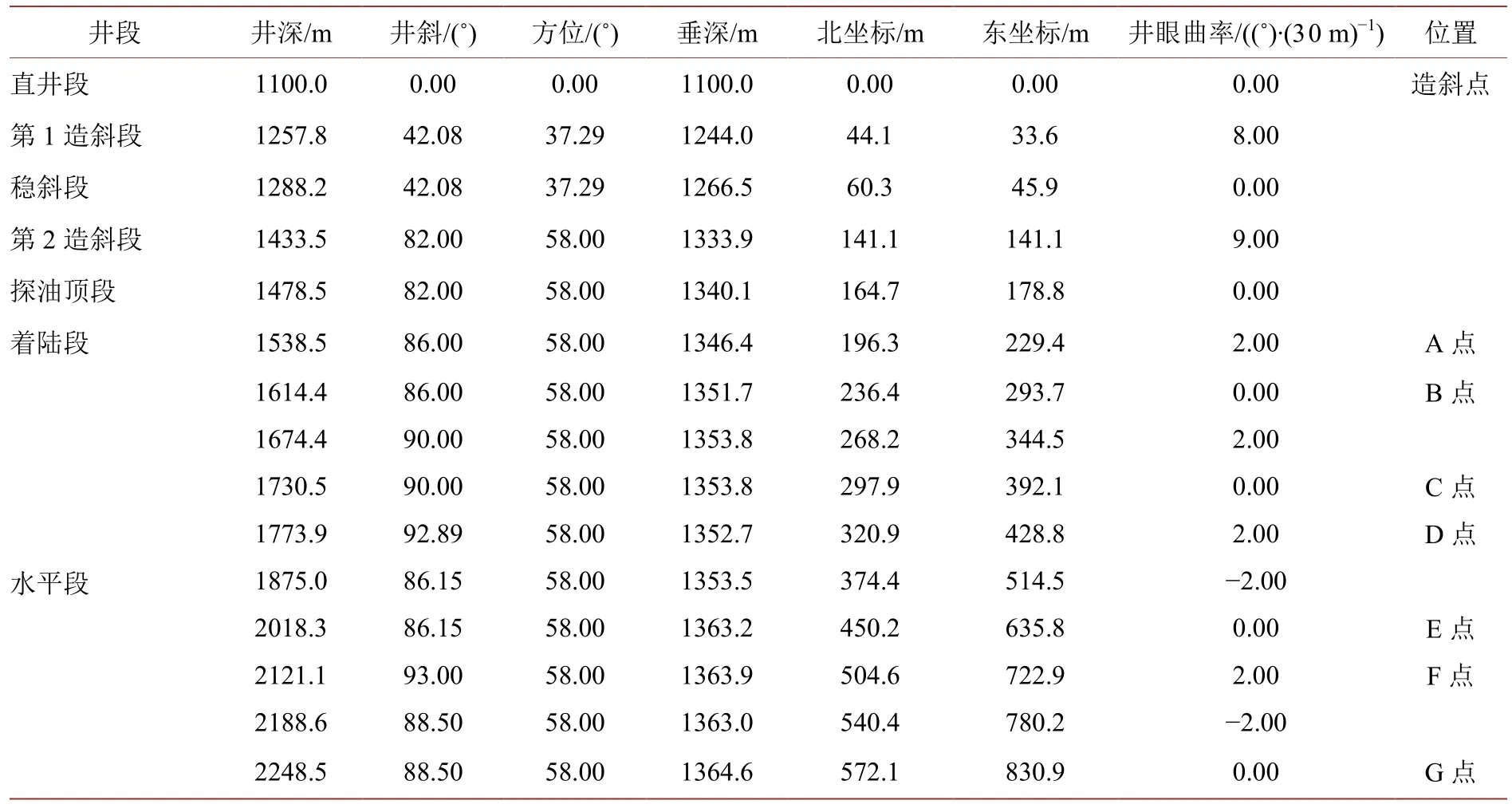
Table 2. The data of profile design for Well A表2. A井剖面设计数据表
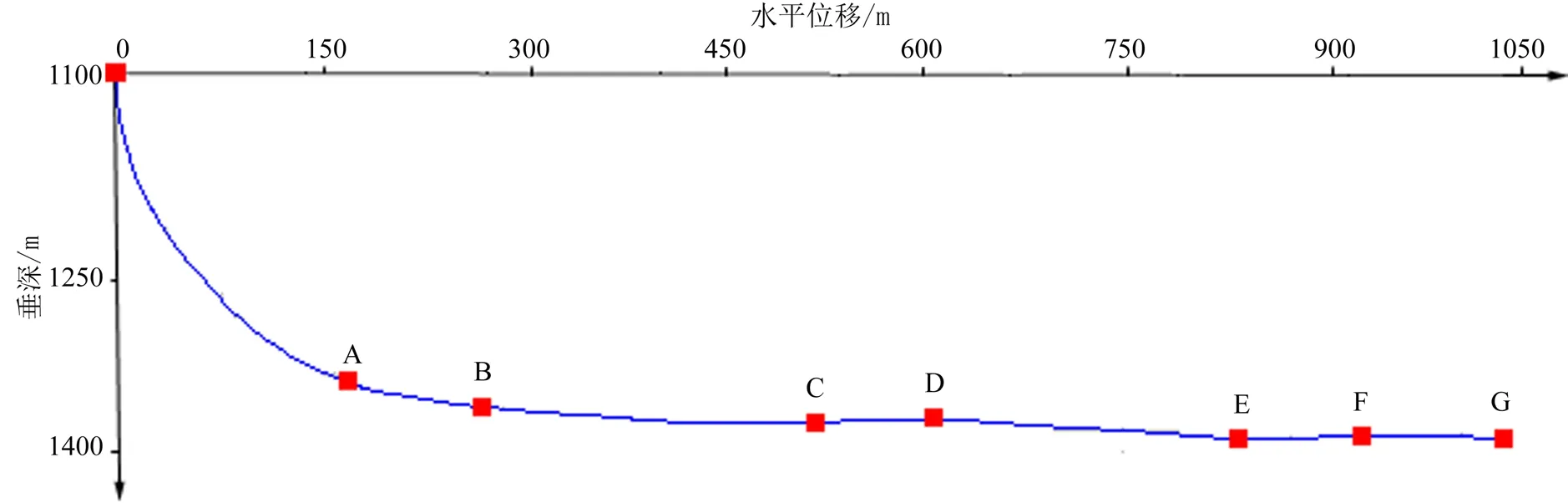
Figure 5. The vertical plan of well trajectory of Well A图5. A井井眼轨迹垂直平面图
该井入靶点A之前优选“直-增-稳-增扭-稳-增”六段制剖面,第一稳斜段便于轨迹控制,第二稳斜段实现探油层。水平段为靶点轨道设计问题,主要采用圆弧或圆弧 + 稳斜段模型进行设计,井眼曲率控制在2˚/30 m,便于现场轨迹控制和下套管作业。
5. 结论
1) 提出的多目标控制点井眼轨道设计方法较好地解决了复杂地质结构和油藏条件下轨道设计难题,为井眼轨道设计和控制提供了理论依据。
2) 多目标控制点水平井设计时首先要保证入靶的井斜和方位,一般将多个靶点中的前两个定义为梯形靶,以方便采用线目标模型进行设计。
3) 若采用单圆弧连接两相邻靶点轨迹起伏较大时,可考虑将位于上一圆弧的轨道修正为空间圆弧加稳斜段(或稳斜段 + 空间圆弧)使轨迹更为平滑。
国家科技重大专项(2008ZX05021-006)。
References)
[1] 苏义脑. 地质导向钻井技术概况及其在我国的研究进展[J]. 石油勘探与开发, 2005, 32(1): 92-95.
[2] 唐雪平, 苏义脑, 陈祖锡. 三维井眼轨道设计模型及应用[J]. 数学实践与认识, 2004, 34(3): 90-93.
[3] 刘修善. 井眼轨道几何学[M]. 北京: 石油工业出版社, 2006.
[4] 韩志勇. 定向钻井设计与计算[M]. 东营: 中国石油大学出版社, 2007.
