缢蛏采收机采收清洗装置设计
2018-03-16张问采
张问采,张 翔
(福建农林大学 机电工程学院,福建 福州 350002)
中国是世界水产养殖第一大国,水产养殖业的发展对保障中国粮食安全发挥了重要作用[1]。缢蛏(Sinonovaculaconstricta)有较高的营养及药用价值,在我国沿海地区有着相当可观的养殖面积。其中,福建、江浙地区凭借其广阔的滩涂资源优势,近几年缢蛏养殖产业发展迅速,已经成为这些地区重要的经济产业[2]。由于缢蛏自身穴居、壳薄等特点,导致我国沿海大面积蛏田采收仍然采用劳动强度大,工作效率低下的传统手工作业。目前国内没有专门用于缢蛏自动化采收的设备,国外贝类采捕设备也多以采捕牡蛎、文蛤等硬壳贝类设计制造,利用高压气体产生真空将贝类和沙土吸取后再分离,设备复杂、投资大,同时也不适用于薄壳贝类[3-6]。
因此,研制缢蛏采收设备对提高捕捞效率和农民收入具有重要意义。缢蛏采收设备研制的核心是收获机构与清洗机构设计,该结构设计直接决定了采收机的适应性与效率。本研究创新了收获方法,在一次工作中完成采收、分选和收集工序,在适应以缢蛏为代表的薄壳贝类采收的同时,有效提升了劳动效率,降低劳动强度。
1 缢蛏采收机基本结构及工作原理
1.1 基本结构
缢蛏采收机[7]如图1所示。主要由4部分组成:采收清洗装置,升降水泵装置,底盘牵引装置和挖掘铲。既可适用于缢蛏机械化采收,同时也兼顾以文蛤为代表的硬壳贝类采收。挖掘铲通过铰链安装在采收清洗装置上,在采收时降下进行挖掘采收,在清洗时收起作为挡水板使用。
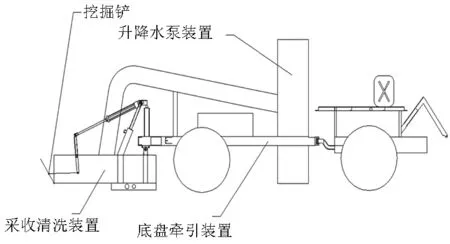
图1 缢蛏采收机结构简图
1.2 工作原理
以专门设计的滩涂轮式底盘[8]作为载体,当缢蛏采收机开至需要作业的滩涂地时,通过液压系统驱动连杆机构并调整挖掘铲入泥角度。再次启动,当挖掘铲掘起滩涂泥输送至采收清洗装置直至填满,而后收起挖掘铲,收起的挖掘铲作为挡水板使用。此时停止行进,启动升降水泵装置,根据滩涂地水位高低调整水泵将水经过输水管抽至采收清洗装置内,进行清洗。清洗结束,打开收集闸门,水流冲出已清洗干净的缢蛏至网兜。上述过程结束后可再次作业。整套设备由1台柴油机提供动力,经分动器输送至各部分机构。
2 采收清洗装置设计
缢蛏采收机采收清洗装置[9]是本设计的核心之处,主要由3部分组成(图2):连杆机构、液压系统和收集清洗装置。该部分通过后连杆与车架相连。
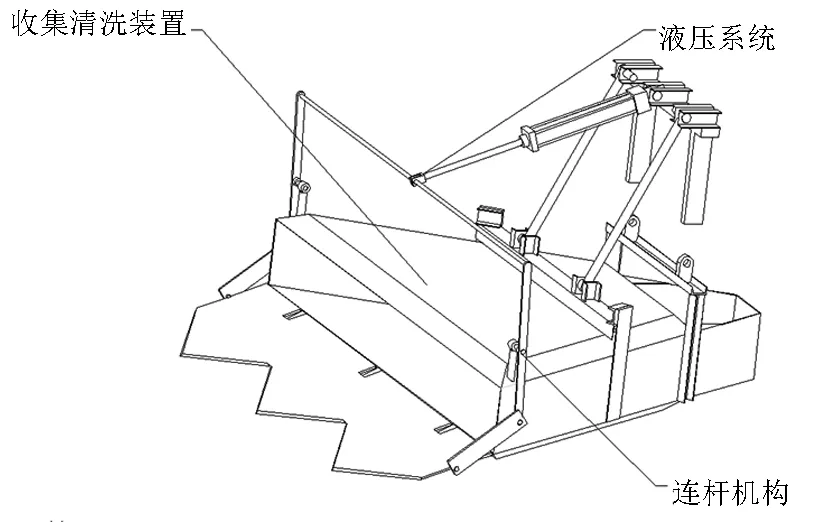
图2 采收清洗装置简图
2.1 连杆机构设计
考虑到缢蛏采收机作业环境恶劣,这部分设计应在机械结构较简单的前提下满足铲、转、挡作业要求。该连杆机构设计基本参数包括各杆杆长、挖掘铲转角范围、挖掘铲与连杆铰接位置、液压元件安装位置。为了确保采收机挖掘深度可以达到设定要求,必须选定下列合适的参数:(1)挖掘铲在不同工作状态下与地面夹角不同,采收时挖掘铲与地面法向夹角为120o,清洗时与地面法向夹角为0o,挖掘铲转角范围在0o~120o。(2)挖掘铲与挡板连杆铰接位置≤400 mm。(3)挖掘铲与挡板连杆间夹角在确保运动轨迹完整实现的同时,尽可能选取较小值,减小有害分力。(4)受实际结构限制,液压缸活塞杆不可避免地要承受部分径向外力。为此,液压缸活塞长度必须适当,一般取活塞杆外径的0.7~1.0倍。
根据上述设计要求,设计了一种符合本机结构特点的连杆机构,其关键点、结构尺寸与三维模型对照如图3所示,取O与N为挖掘铲、连杆的支点,AO为挖掘铲,AB与BC为连杆。工作过程如下:清洗时挖掘铲需要收起作挡水板,此时液压杆伸长,铰链C以固定在收集清洗装置上支点N为圆心逆时针转动至C1位置,通过连杆带动铰链B移动至B1位置,铰链A同样以固定在收集清洗装置上支点O为圆心带动挖掘铲顺时针转动至A1位置;采收时挖掘铲需要放下,此时液压杆收缩即可。
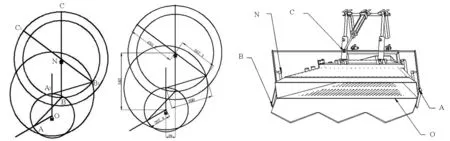
图3 连杆机构关键点、结构尺寸图与铰链实物对照图
2.2 液压系统设计
液压控制系统原理[10]如图4所示。该液压系统由液压缸、电磁换向阀、单向阀、液压泵、电机、过滤器、油箱及溢流阀等组成。液压缸伸缩可以调节与挖掘铲铰接连杆机构运动,从而保证挖掘铲与地面角度和深度的要求,实现挖掘铲的两个功能。采用耳环安装方法的液压缸是液压系统核心元件。根据所求系统动力学模型[11]:
F0=N0sinα+μ1N0cosα+CScosα
(1)
式中:F0-牵引阻力,N;N0-作用于铲面法向载荷,N;μ1-土壤与挖掘面摩擦系数;α—入泥角度,°;C-土壤附着力因数,N/m2;S-挖掘铲面积,m2。
计算牵引阻力为16 640 N。根据该连杆机构长度及运动范围,确定液压缸安装位置。初选液压泵工作压力为8 Mpa,依据公式:
(2)
(3)
d=0.7D
(4)
式中:A—有效工作面积,m2;F1—主液压缸工作负载,N;P1—液压泵工作压力,N;D—主液压缸直径,m;d—活塞杆直径,m。
计算液压缸有效工作面积与主液压缸直径,根据液压缸标准直径尺寸系列(GB/T 2348-2001)将其圆整后选其型号为HSG-125/90·E3911-1500的工程用液压缸。
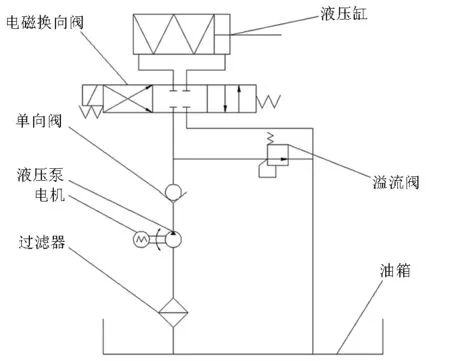
图4 液压控制原理图
驱动连杆机构和挖掘铲正常工作时液压系统原理如下:(1)从分选工序到采收工序。电磁换向阀处于左位,液压泵有杆腔进油、无杆腔回油,液压缸收缩,挖掘铲与地面法向夹角增大,直到满足设定挖掘深度要求。(2)采收工序。电磁换向阀处于中位,液压缸不动作,挖掘铲满足深度设定夹角要求。(3)从采收工序到分选工序。电磁换向阀位于右位,液压缸无杆腔进油、有杆腔回油,液压缸伸长,挖掘铲与地面法向夹角减小,直到满足设定夹角要求。(4)分选工序。电磁换向阀处于中位,液压缸不动作,挖掘铲满足深度设定夹角要求。
2.3 收集清洗装置设计
该装置利用钢板焊接,尽可能避免采用机械结构以适应恶劣工作环境,由清洗喷淋面和筛孔面等组成如图5所示。
该装置呈梯形,上下由四个呈平行清洗喷淋面两隔板与筛孔面两隔板组成,其后端为收集装置闸门与观察孔,最宽面开口为入泥口,其余部分封闭、中空,通过连杆、铰接孔与车架相连接。工作时,滩涂泥随挖掘铲喂入该装置,通过观察孔确定滩涂泥与缢蛏混合物是否填满收集清洗装置,确认填满后水流通过注水口进入喷淋面,水流经过喷淋面小孔分流流出,将滩涂泥与缢蛏分离并清洗,缢蛏留在筛孔面上而泥水混合物经过筛孔面从排水孔流出,当排水孔流出的水与抽水泵抽入水颜色一致时,表明缢蛏清洗干净,打开收集闸门,由于收集清洗装置呈梯形收缩,缢蛏随着水流通过收集闸门进入收集袋中,完成一次收集,循环往复工作。这样在一次工作过程中就完成缢蛏采收、清洗和收集。
3 采收清洗装置基本设计参数确定
3.1 工作高度与入泥口宽度
采收清洗装置工作高度是指铰接孔到地面的距离,计算公式如下[11]:
K=L+M
(5)
M=Ssinα-h
(6)
式中:K—工作高度,mm;L-铰链孔至排水底面距离,mm;M—有效排水距离,mm;S—设计铲长,mm;h—土壤扰动深度(挖掘深度),mm。
如图6,确定工作高度K=791.1 mm,同时有效排水距离M=45.1 mm满足排水顺畅的要求。
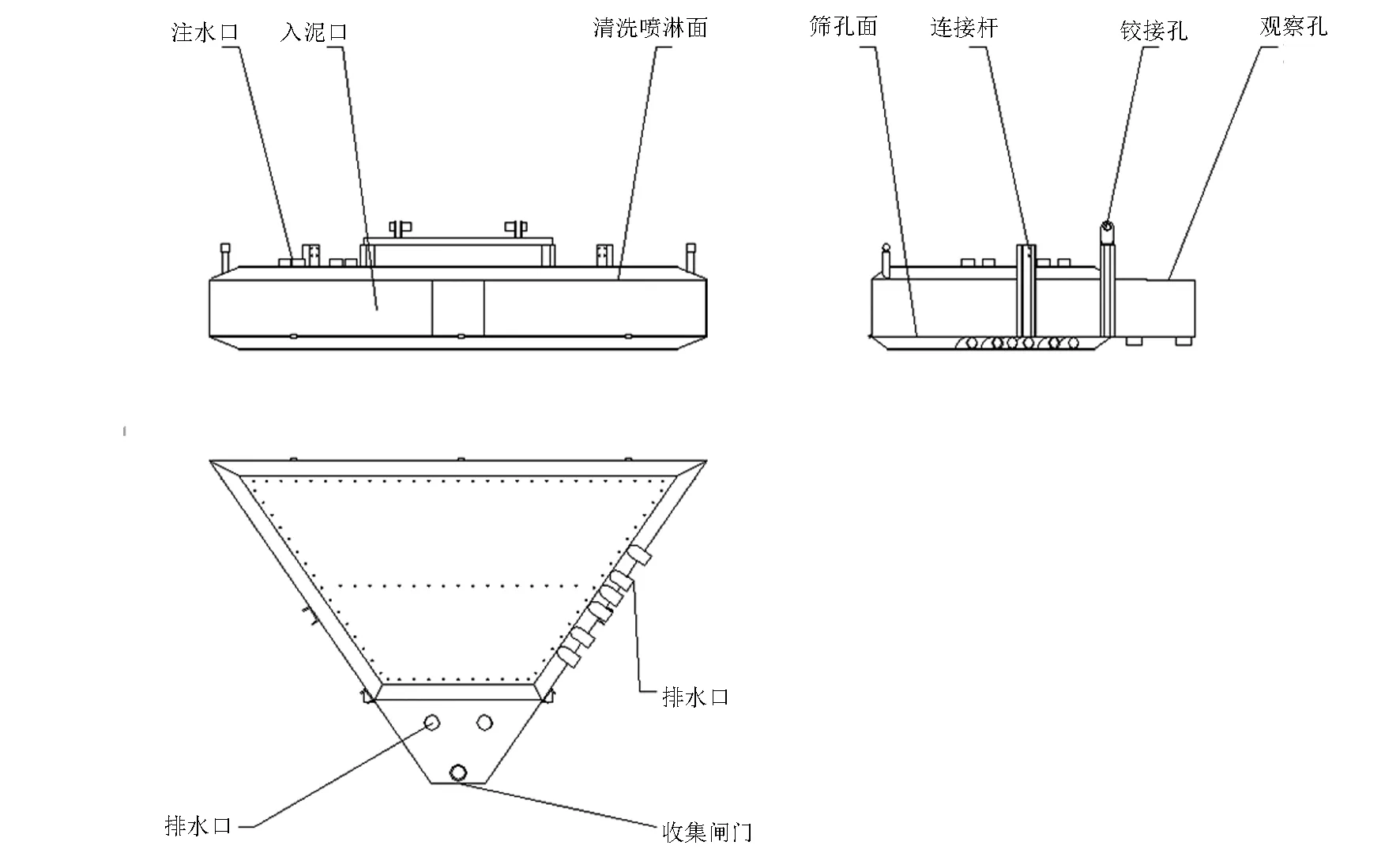
图5 收集清洗装置示意图
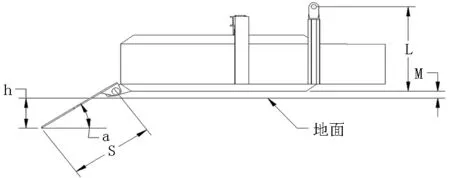
图6 采收清洗装置工作高度示意图
入泥口吞入泥土宽度,即入泥口宽度可以由挖掘深度来计算[12-16]。
图7所示梯形面积可以假定是由挖掘部件所支持。土壤扰动深度(挖掘深度)和入泥口宽度(吞入泥土宽度)关系由式(7)决定:
(7)
式中:H-入泥口宽度(吞入泥土宽度),mm;β-前失效面倾角,deg。计算可得:H≥474 mm。
依据上述计算,确定入泥口宽度为500 mm,即可确保挖掘铲掘起的滩涂泥全部喂入装置达到设定要求。
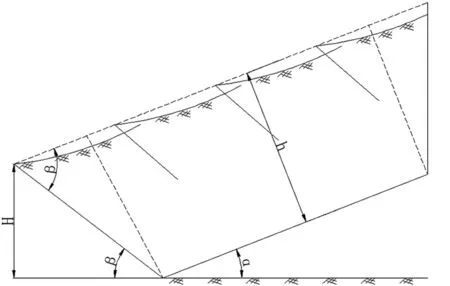
图7 挖掘深度与吞入泥土宽度几何关系图
3.2 筛孔直径
筛孔筛分贝类是贝类机械化采收最常选用的分选方式。筛面设计中筛孔直径选择对缢蛏筛分效果有着至关重要的影响,直接决定了筛分效果。但由于缢蛏穴居深度与体长成正比,一般穴居深度为体长的3~6倍[17]。所以缢蛏采收机筛孔直径选择应从如下两方面考虑:(1)采收机吞入滩涂泥深度接近500 mm,在该深度下缢蛏个体大小有差异;(2)滩涂泥蛏混合物在喷淋清洗与收集过程中缢蛏在泥水混合物中姿态不停变化。
依据上述考虑,进行缢蛏限深养殖试验。采用限定缢蛏下探深度的方法确定不同深度缢蛏大小,从而得出最佳筛孔设计参数。
试验地点在福建省福州市长乐区梅花镇梅新村养殖基地。选用40 m2养殖池塘。利用缢蛏底铺网养殖技术[18-20]分别按深度300 mm、400 mm和500 mm进行聚乙烯网片铺设,铺好后重新覆盖泥土。水质培育合格后投放缢蛏苗四组,幼苗规格为2 900粒/kg,约950粒/m2。在试验养殖期间,塘内水质透明度保持浅黄色至黄绿色,做好水质监测与常规环境因子检测,并依据变化不定期进行施肥,保证缢蛏生长情况良好。播种养殖5个月后进行人工采收,以缢蛏壳长、壳高和壳宽作为测量数据(图8)。从每层试验样本中随机选取100粒,用游标卡尺对缢蛏进行测量计算平均值,结果见表1。
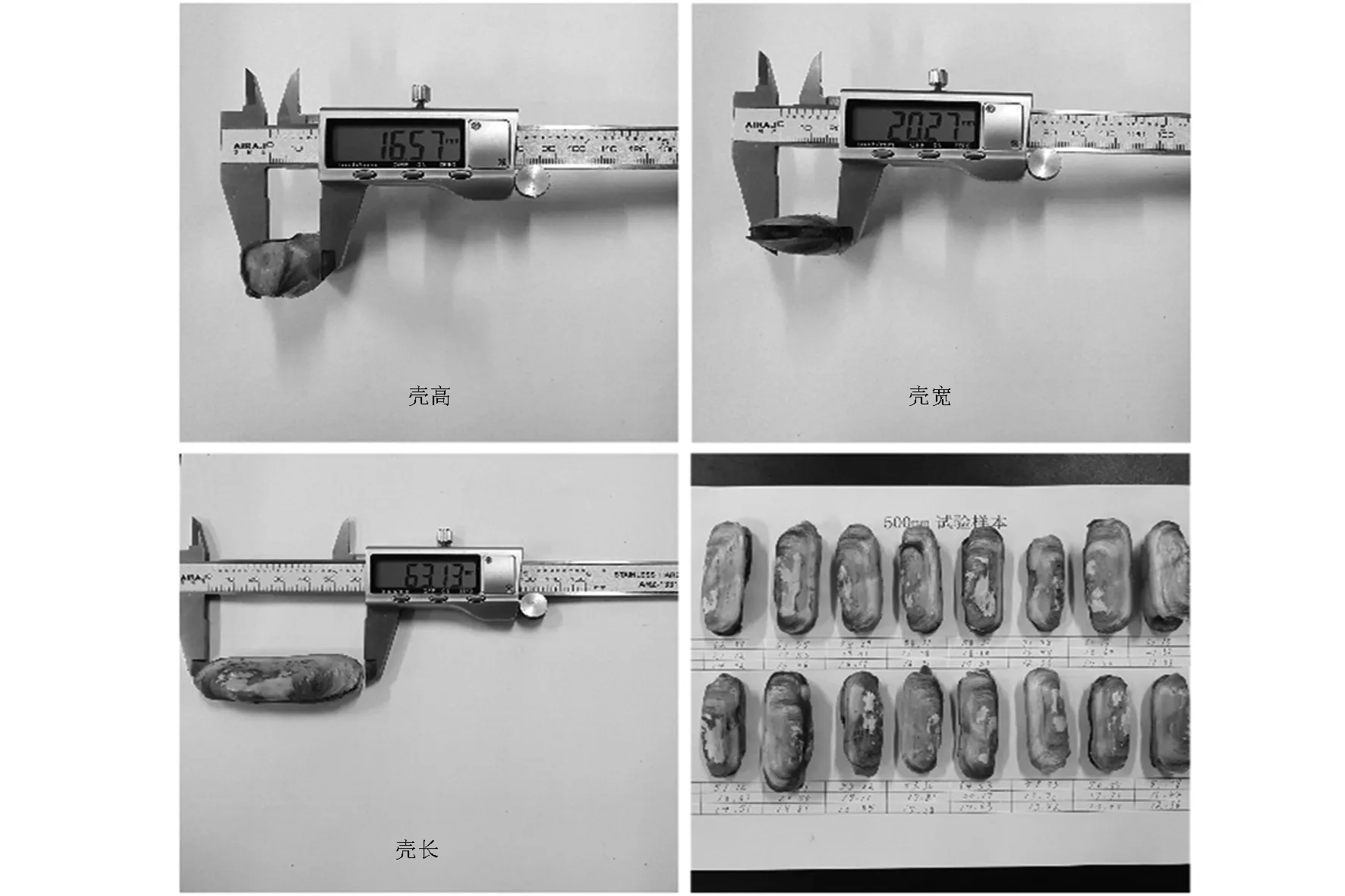
图8 样本壳高、壳宽、壳长测量示意图

表1 缢蛏壳长、壳高和壳宽统计表
分析可知,缢蛏在不同泥层壳长、壳高和壳宽差异明显,生长姿态也有不同。在进行机械化采收时,如果筛孔直径过大会导致漏贝率居高不下,同时冲洗分选时缢蛏姿态变化也会引起筛孔漏贝问题,筛孔过小又会导致泥沙阻塞。所以筛孔直径最大值的选择应以壳长、壳高和壳宽中最小值确定。同时用于中等粒级物料筛分,通常孔径为10~50 mm[21]。综上,采用筛孔分选缢蛏的采收设备筛孔直径选择应为10~12 mm。
4 结论
缢蛏采收机采收清洗装置利用连杆机构、液压系统和收集清洗装置实现缢蛏机械化采收,可满足挖掘铲在不同工作状态下不同功能夹角变化要求,同时在一次工作中完成采收、分选和收集3个工序,提高了工作效率,降低工人劳动强度。通过设计计算与试验分析,确定了该装置包括液压缸选型(HSG-25/90·E 3911-1500)、工作高度(791.1 mm)、入泥口宽度(500 mm)和筛孔直径范围(10~12 mm)的基本设计参数,为缢蛏类采收装置的开发和应用提供参考。
□
[1] 齐景发.中国水产养殖业的发展与展望[J].科学养鱼,2002(6):4-5.
[2] 张问采,贾文月,张翔.缢蛏采收机械化的现状与发展趋势[J].福建农机,2017(1):29-30.
[3] 王林冲,高永胜.文蛤取捕机的开发与研制[J].江苏农机化,2006(6):25-26.
[4] 范大岳.缢蛏机械采捕适应性的探讨[J].渔业现代化,1981(4):52-54.
[5] 范大岳.关于研制缢蛏采捕机若干问题初探[J].渔业现代化,1984(6):34-35.
[6] 范大岳.国外贝类采捕机的发展[J].渔业现代化,1982,(04):51-52.
[7] 张问采.一种滩涂采蛏机:201720620679.3[P].2017-11-15.
[8] 张问采,贾文月,张翔.缢蛏采收机行走驱动前底盘的动力学分析及减振优化研究[J].兰州工业学院学报,2018(1):47-51.
[9] 张问采.贝类采收清洗铲:201720613583.3[P].2017-11-15.
[10] 李松晶,王清岩.液压系统设计方法及设计步骤[M].北京:化学工业出版社,2012.
[11] 张问采,贾文月,张翔.缢蛏采收机挖掘铲的设计与仿真分析[J].新余学院学报,2017,22(06):17-21.
[12] 贾晶霞.马铃薯挖掘铲参数优化与性能分析[D].保定:河北农业大学,2003.
[13] 申屠留芳,张炎,孙星钊,等.滩涂文蛤采收机挖掘铲的设计与分析[J].农机化研究,2016(11):113-117.
[14] 王涛,廖宇兰,杨怡,等.木薯收获机多阶挖掘铲设计及其力学特性分析[J].农机化研究,2015(10):50-54.
[15] 邓伟刚,王春光,孙宏,等.马铃薯挖掘机挖掘铲力学模型构建[J].农机化研究,2014(1):84-86.
[16] WR吉尔,G E范德伯奇.耕作和牵引土壤动力学[M].北京:中国农业机械出版社,1983:102-160.
[17] 许振祖.缢蛏[J].水产科技情报,1977(Z3):57-60.
[18] 陈丽芝.围塘底铺网养殖缢蛏技术[J].科学养鱼,2016(2):45-46.
[19] 陈飞,李会斌.缢蛏底铺网养殖技术模式[J].科学养鱼,2016(7):43-44.
[20] 张明.任延军,李永仁.天津沿海缢蛏池塘养殖试验[J].天津农业科学,2016,22(9):67-70.
[21] 杨秀伦.不同材料形状物料颗粒透筛性能的研究[D].郑州:郑州大学,2007.