MSCSG转子系统的扩展双频Bode图稳定性分析方法
2018-03-16夏长峰蔡远文樊亚洪辛朝军尹增愿
夏长峰,蔡远文,任 元,*,樊亚洪,辛朝军,尹增愿
(1.航天工程大学研究生院, 北京 101416;2.航天工程大学宇航科学与技术系, 北京 101416;3.北京控制工程研究所, 北京 100190)
0 引 言
航天器姿态控制系统由姿态敏感器、姿态控制器和执行机构组成[1-2]。姿态敏感器用于测量航天器姿态信息[3-4],姿态控制器根据敏感器的测量信息对执行机构发送控制指令,执行机构根据控制指令为航天器提供控制力矩[5-6]。作为敏感器的转子式速率陀螺仪与作为执行器的控制力矩陀螺同为惯性器件,如果能实现器件功能合二为一,姿态控制系统的体积、重量、功耗、成本将显著降低。
任元等[7]提出了一种磁悬浮控制敏感陀螺(Magnetically Suspended Control & Sensing Gyroscope, MSCSG)方案,融合了磁悬浮控制力矩陀螺(Magnetically Suspended Control Momentum Gyroscope, MSCMG)姿态控制、转子式速率陀螺仪姿态敏感的功能,由于转子采用磁悬浮力支承,具有无接触、无摩擦、寿命长、精度高等优点。MSCSG转子系统采用五自由度全主动控制,具有一定小角度的微框架效应,能够瞬间输出较大的陀螺力矩,实现姿态控制;载体姿态变化时,磁轴承对转子沿径向施加二自由度控制力矩,通过测量控制力矩间接实现姿态敏感。由于MSCSG转子偏转系统是多变量、强耦合的复杂系统,转子在高转速条件下会产生明显的陀螺效应[5],影响系统的稳定性。因此,对MSCSG转子系统进行稳定控制是实现其检控一体功能的必然要求,而分析不同转速对转子系统稳定性的影响是稳定控制的重要基础。
现有的基于磁阻力磁轴承支承的MSCMG转子系统稳定性分析已经非常成熟[8-10],但以洛伦兹力磁轴承(Lorentz Force Magnetic Bearing,LFMB)支承的MSCSG转子系统具有其特殊性:一方面,其五自由度悬浮轴承在磁路设计上采用解耦设计,消除了三个平动方向对两个径向偏转方向的耦合,因此转子偏转只受LFMB控制;另一方面,相比于MSCMG[11-12],MSCSG通过LFMB对转子系统施加直驱的偏转力矩,转子系统动力学特性发生变化。因此,对以LFMB支承的MSCSG转子系统进行稳定性分析是非常有意义的工作,但目前关于这方面的研究非常少,绝大部分关于LFMB的文章只涉及结构优化设计[13]、采用LFMB对转子系统进行力矩输出以及偏转角度控制[14-16]。
根据控制理论,判定系统稳定性最直观的方法是计算系统运动方程的特征根,根据有无右半平面特征根确定系统稳定性[17]。但对于高速转子系统,由于被控对象与控制器构成的系统模型阶次较高,直接计算系统的所有特征根存在计算量大的问题。劳斯稳定判据[18]、赫尔维茨稳定判据[19]虽然可以避免直接计算特征根,但是仍然需要建立闭环传递函数模型,对于模型复杂的闭环转子系统,计算量依然很大。与劳斯判据、赫尔维茨判据相比,奈奎斯特稳定判据[20]更为方便,只需根据开环传递函数绘制Nyquist曲线,选择恰当的闭合区域通过映射之后计算环绕圈数即可分析对应闭环系统的稳定性,但该方法不够直观,在模型复杂条件下容易出现曲线交错、环绕圈数难以确定的问题。文献[21-22]提出一种双频Bode图方法,对MSCMG转子系统进行稳定性分析,直观且便于实现,但该分析方法仅适用于最小相位系统。本文通过变量重构,将基于LFMB驱动的MSCSG双输入双输出转子偏转系统等效变换为单输入单输出系统,在分析Nyquist曲线与Bode图的关联性的基础上,基于Nyquist判据将双频Bode图判据方法扩展应用于包含积分项的非最小相位系统,直观地预测不同转速条件下MSCSG转子系统的稳定性,采用主导根轨迹曲线预测转子系统转速稳定区间,并通过时域仿真进行校验。
1 MSCSG转子系统工作原理
MSCSG结构如图1所示,主要由陀螺房、陀螺转子、轴向磁轴承、力矩器、径向磁轴承、旋转电机、位移传感器构成。其中,旋转电机驱动转子绕轴向高速旋转,径向磁轴承驱动转子沿径向平动,轴向磁轴承驱动转子沿轴向平动,力矩器驱动转子绕径向偏转。
MSCSG通过磁阻力磁轴承实现转子三自由度平动悬浮,采用LFMB为力矩器实现转子径向偏转控制。其中,平动悬浮包括一自由度轴向悬浮和二自由度径向悬浮。为避免转子发生偏转后,磁极面气隙不均匀导致磁极面的电磁吸力不均匀,产生径向干扰力矩,径向磁轴承和轴向磁轴承均采用球面结构,其剖面图如图2所示。
图2中,正对的一组磁轴承构成一个平动控制回路,独立控制1个平动自由度。球形转子位于磁轴承磁极形成的球形包络面中,转子球心与磁轴承磁极所在球形包络面的球心重合。因此,无论球形转子偏转与否,球面磁极产生的电磁力始终指向转子球心,不会带来干扰力矩。因此,MSCSG转子径向偏转只受LFMB控制。
LFMB产生的电磁力依据安培力定律,即磁感应强度为B的磁场中沿与磁场垂直方向放置长度为L的线圈,当流经线圈中电流为I时,线圈将受到大小为BIL的安培力作用。LFMB组件结构如图3所示。转子外沿一周的狭长内壁上放置着上、下两层磁钢,两层磁钢的内、外磁钢间充磁方向相反,因此形成了图3中虚线所示的闭合磁场。LFMB骨架上安装了四组匝数相同的线圈,位于内外磁钢间的狭缝中,沿LFMB骨架周向均匀分布,四组线圈成对使用,正对的两组线圈为一对,用于实现转子的二自由度偏转控制。
以LFMB几何中心o为原点定义定子坐标系o-xyz,其中x轴与y轴分别与相对方向两组线圈中心线重合,z轴方向根据右手定则确定。当与磁场垂直方向放置的线圈通入电流时,线圈的上下两部分将分别产生垂直于线圈及磁场方向的安培力,合力大小为式(1)
(1)
式中n为线圈匝数。根据图3中LFMB工作原理图,LFMB提供的x、y方向偏转力矩为
(2)
式中ix+、ix-分别为x轴正、负方向上的线圈驱动电流,iy+、iy-分别为y轴正、负方向上线圈中的驱动电流,lm为LFMB定子半径。令iy+=iα,ix-=iβ,当相对方向线圈通入大小相等、方向相同的电流时,线圈将产生大小相等、方向相反的安培力,形成力偶驱动转子径向偏转,此时,根据式(2)可知偏转力矩px、py表达式为:
(3)
2 转子偏转控制系统模型及其等效变换
MSCSG转子偏转控制系统闭环结构如图4所示,控制通道主要包括传感器、抗混叠滤波器、控制器和功率放大器构成。闭合回路中,传感器检测到转子偏转信息并通过抗混叠滤波器进行降噪处理,控制器根据偏转信息确定偏转指令,随后功率放大器将偏转指令转化为控制电流,驱动LFMB产生控制力矩,使转子偏转至给定参考位置。
由图4的控制系统框图可知,根据转子偏转角可确定控制电流为:
(4)

(5)
式中lr为位移传感器到z轴的距离。
对于高速旋转的MSCSG的转子,其陀螺技术方程为[1]:
(6)
式中Jx、Jy为转子相对于x轴及y轴的转动惯量,大小与转子赤道转动惯量Jr相等;Jz为转子相对于z轴的转动惯量;Ω为转子轴向角速度,满足Ω=2πFr,Fr为以频率为单位的轴向角速度。
将式(3)、(4)代入式(6),得到MSCSG转子偏转动力学方程组:
(7)
将式(7)进行拉氏变换得:
(8)
令θ=α+jβ,j为虚数单位。将式(8)中第二个方程乘以j与第一个方程相加可得:
-4nlmBLksgA(s)gw(s)gc(s)θ(s)
(9)
推导得到
θ(s)=
(10)
转子系统闭环特征方程为
Jrs2-jJzΩs+4nlmBLksgA(s)gw(s)gc(s)=0
(11)
通过式(8)-(11)的变换和推导,可将转子系统等效成单变量反馈控制系统,等效被控对象和等效控制通道传递函数分别为:
(12)
gce(s)=4nlmBLksgA(s)gw(s)gc(s)
(13)
系统的等效开环传递函数表达式为:
(14)
通过变量重构,双输入双输出的转子偏转系统等效变换为复系数单变量系统,进而便于利用经典控制理论进行稳定性分析。
3 转子偏转系统稳定性分析
对于复系数单变量系统,文献[21-22]提出采用双频Bode图稳定性判据方法进行稳定性分析,但该判据的提出是以MSCMG转子系统为最小相位系统为前提条件。对于以LFMB驱动的MSCSG转子系统,由式(14)可知,由于传递函数中包含纯积分环节,属于非最小相位系统,因此该判据不能直接应用于MSCSG转子系统。根据Nyquist稳定判据,在推导Nyquist曲线与Bode图关联性的基础上提出了基于扩展双频Bode图的MSCSG转子系统稳定性分析方法。
3.1 Nyquist曲线与Bode图的关联性
对于反馈控制系统,若其前向和反向传递函数分别为G(s)、H(s),则其开环传递函数表达式为:
(15)
式中:K为传递函数前置系数,v为积分环节个数,zi、pj为开环传递函数的零、极点。定义不包含积分环节的系统为0型系统,积分环节个数为1、2、3的系统分别为Ⅰ、Ⅱ、Ⅲ型系统。
根据Nyquist稳定判据[20],闭环系统稳定的充要条件是Nyquist曲线G(jω)H(jω)对临界点(-1,j0)的连续相角增量ΔΦ(s)为:
ΔΦ(s)=2pπ+vπ/2 (v=0,1,2,3)
(16)

随着ω的增加,Nyquist曲线自上而下穿过临界点(-1,j0)左边的负实轴,相位角增加2π,称为正穿越;随着ω的增加,Nyquist曲线自下而上穿过临界点(-1,j0)左边的负实轴,相位角减少2π,称为负穿越。此外,Nyquist曲线自临界点左侧的负实轴开始的穿越,称为半次穿越。因此,ΔΦ(s)的取值取决于正、负穿越次数N+、N-的差值,Nyquist曲线对临界点的连续相角增量ΔΦ(s)还可以表示为:
ΔΦ(s)=2π(N+-N-)+vπ/2 (v=0,1,2,3)
(17)
Nyquist曲线在临界点(-1,j0)左侧时,其对数幅值L(ω)始终为正;Nyquist曲线所在平面的负实轴相当于Bode图中相频曲线的(2k+1+v/2)π线,其中,k为整数。因此,Nyquist曲线正、负穿越临界点左侧负实轴的次数,完全对应于Bode图相频曲线正、负穿越(2k+1+v/2)π线的次数。
3.2 基于扩展双频Bode图的稳定性判据
由于Nyquist曲线反映的所有信息都可以在Bode图上得以体现,映射关系为一一映射,且Bode图可以更方便地反映系统的稳定性信息,因此可以利用二者的对应关系,采用Bode图进行稳定性分析。经典控制理论中,由于传递函数系数为实数,正负频率特性关于零频率对称,因此绘制Bode图时只需绘制正频率特性[17]。但是,根据式(14)可知,由于传递函数系数中存在复数,不再关于零频率对称,因此绘制Bode图时必须同时考虑正、负频率特性,即绘制双频Bode图。
由3.1节中Nyquist曲线与Bode图对应关系可知,被控对象传递函数包含积分环节时,即v≠0的条件下,Bode图中正、负穿越线不再是文献[21-22]中的(2k+1)π线,而是和v值相关的(2k+1+v/2)π线。此外,双频Bode图中正、负频率特性曲线穿越极性判断标准相反,即正频Bode图中,相频曲线由下而上穿越为正穿越,由上而下穿越为负穿越;而负频Bode图中,相频曲线由上而下穿越为正穿越,由下而上穿越为负穿越。因此,本文在文献[21-22]的基础上,利用Nyquist曲线与Bode图的关联性,将双频Bode图判据拓展应用于包含v(v=0~3)个积分环节的系统,判据如下:
对于区间:
LN+={ω|ω≤0,lg|G(-jω)H(-jω)|≥0}
(18)
LP+={ω|ω≥0,lg|G(jω)H(jω)|≥0}
(19)
定义Nn+和Nn-分别表示相频曲线Φ(-jω)在LN+区间正穿越和负穿越次数,Np+和Np-分别表示相频曲线Φ (j ω)在LN+区间正穿越和负穿越次数,总穿越次数N=Nn++Np+-Nn--Np-,Q为开环系统正实部极点数,Z为闭环系统正实部极点数,则Z=Q-N,且闭环系统稳定的充要条件是Z=0。
根据式(14),被控对象传递函数开环极点分别为0、 jJzΩ/Jr,不存在正实部开环极点,因此Q=0。同时,由于式(14)的分母中包含系数-jJzΩ,因此系统开环传递函表达式随转子转速变化,进而影响转子系统的频率特性,最终影响系统稳定性。转子转速分别为0、90、100 Hz条件下,绘制转子系统开环传递函数双频Bode图,使用的转子系统主要参数如表1所示,控制通道主要参数根据文献[1]中的方法进行设置。表1中,除前文介绍过参数外,Kp、Ki、Kd分别为PID控制器的比例、积分、微分系数,ka为功放增益,ωa为功放截止频率,ωf为抗混叠滤波器截止频率。
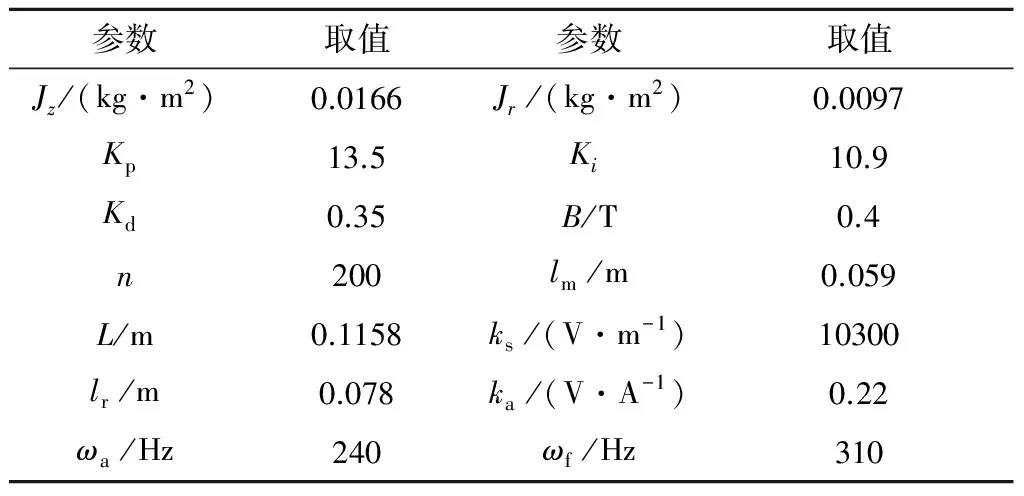
表1 转子系统参数Table 1 Parameters of rotor system
转子转速分别为0、90、100 Hz时,绘制的双频Bode图如图5(a)~5(c)所示。相频特性图中,一个黑色箭头符号表示半次穿越,箭头斜向上表示正穿越,箭头斜向下表示负穿越,正穿越和负穿越次数的差为总穿越次数N。
根据扩展双频Bode图稳定性判据,稳定性分析结果如下:
(1)Fr=0 Hz时,式(14)中包含2个积分项,属于Ⅱ型系统,因此计算穿越次数时需根据穿越双频Bode图中(2k+1+2/2)π线次数,由图5(a)知,N=0+0-0-0=0,则Z=Q-N=0,转子系统稳定。
(2)Fr=90 Hz时,式(14)中包含1个积分项,属于Ⅰ型系统,因此计算穿越次数时需根据穿越双频Bode图中(2k+1+1/2)π线次数,由图5(b)知,N=0.5+0.5-0-1=0,则Z=Q-N=0,转子系统稳定。
(3)Fr=100 Hz时,式(14)中包含一个积分项,属于Ⅰ型系统,因此计算穿越次数时需根据穿越双频Bode图中(2k+1+1/2)π线次数,由图5(c)知,N=0.5+0.5-0-0=1,则Z=Q-N≠0,转子系统不稳定。
不同转速下基于扩展双频Bode图稳定性分析结果表明,转子转速小于90 Hz时,转子系统稳定;转子转速大于100 Hz时,转子系统不稳定。
3.3 基于转速根轨迹的稳定性分析
为检验转速对转子系统稳定性的影响,利用Matlab搭建转子偏转系统仿真模型,采用循环指令对转速赋值,通过pzmap函数计算系统的极点,并将虚轴附近的极点以描点的方式画出,从而得到转子系统的主导根轨迹。转速在0~350 Hz时,基于LFMB支承的MSCSG转子系统主导转速根轨迹如图6所示,图中起始转速为0 Hz,转速间隔为10 Hz。
由图6可知,起始转速条件下,系统的极点位于虚轴左侧,说明系统稳定;随转速升高,极点位置发生变化,当转速由90 Hz升至100 Hz时,极点轨迹首次从左半平面穿过虚轴进入右半平面,系统出现不稳定极点;转速由310 Hz升至320 Hz时,极点全部位于右半平面。因此转子系统在转速为0~90 Hz时,极点位于左半平面,系统稳定;在转速大于100 Hz时,右半平面存在极点,系统不稳定。与3.2中分析结果相一致。
4 仿真校验
根据MSCSG设计指标,转子偏转产生的偏移量小于保护轴承间隙的10%时,可认定转子系统稳定[7]。由于转子保护轴承间隙为0.2 mm,因此当转子轴向偏移量小于20 um时,转子系统稳定。因此,将偏移量20 um,代入式(5)可知,当转子偏离平衡位置角度大于0.015°时,转子系统不稳定。
针对MSCSG转子偏转系统建立基于分散PID控制器的Simulink仿真模型,对转子运动轨迹进行时域仿真。仿真结果包括转子径向偏转角响应曲线、轴心轨迹曲线。其中,轴心轨迹曲线为将式(5)中hx+、hy+合成得到的李莎育图。转子转速为90 Hz时,仿真得到的转子偏转角α、β响应曲线如图7(a)、7(b)所示,轴心轨迹曲线如图8(a)所示,由图7(a)、7(b)以及图8(a)可知,转速为90 Hz条件下,转子径向偏转角度变化范围在±0.004°之间,位移传感器检测到的转子偏移幅度在±4.5 um之间,转子系统稳定;转子转速为100 Hz时,转子偏转角α、β响应曲线如图7(c)、7(d)所示,轴心轨迹曲线如图8(b)所示,由图7(c)、7(d)以及图8(b)可知,转速为100 Hz条件下,转子径向偏转角度变化范围超出了±0.015°的区间,位移传感器检测到的转子偏移幅度在±40 μm之间,转子系统不稳定。图7与图8的仿真校验结果与3.2节中判据结果相一致,验证了所提出稳定性分析方法的正确性。
5 结 论
针对以LFMB驱动的MSCSG转子系统稳定判据问题,提出一种适用于非最小相位系统的扩展双频Bode图稳定性分析方法。通过变量重构,将双输入双输出的MSCSG转子偏转系统等效变换为单输入单输出系统;基于Nyquist稳定判据,利用Nyquist曲线与Bode图的映射关系,扩展了双频Bode图稳定判据,得到了基于扩展双频Bode图的MSCSG转子系统稳定性分析方法,对不同转速条件下转子系统稳定性进行分析;并采用根轨迹曲线预测了转子系统的转速稳定区间。时域仿真结果验证了本文所提出的稳定性分析方法的正确性和有效性。本文提出的扩展双频Bode图稳定性分析方法直观且便于工程应用,是实现MSCSG转子系统稳定控制的重要基础。
[1] 房建成, 任元. 磁悬浮控制力矩陀螺技术[M]. 北京:国防工业出版社, 2014:107-120.
[2] Xin C J, Cai Y W, Ren Y, et al. Analysis, modeling and compensation of dynamic imbalance error for a magnetically suspended sensitive gyroscope[J]. Journal of Magnetics, 2017, 21(4):529-531.
[3] Liu X K, Zhao H, Yao Y, et al. Modeling and analysis of micro-spacecraft attitude sensing with gyrowheel[J]. Sensors, 2016, 16(8):1321-1324.
[4] 王华, 王平, 任元,等. 基于磁悬浮控制力矩陀螺的航天器姿态高精度高带宽测量方法[J]. 宇航学报, 2016, 37(4):451-460. [Wang Ping, Wang Hua, Ren Yuan, et al. High accuracy and high bandwidth measurement method of spacecraft attitude based on MSCMG[J]. Journal of Astronautics, 2016, 37(4):451-460.]
[5] 房建成, 孙津济, 樊亚洪. 磁悬浮惯性动量轮技术[M]. 北京:国防工业出版社, 2012:217-225.
[6] 杨倩, 崔培玲, 韩邦成,等. 航天器机动时DGMSCMG磁悬浮转子干扰补偿控制[J]. 宇航学报, 2012, 33(6):720-727.[Yang Qian, Cui Pei-ling, Han Bang-cheng, et al. Disturbance compensation control of magnetically suspended rotor of DGMSCMG during spacecraft attitude maneuver[J]. Journal of Astronautics, 2012, 33(6):720-727]
[7] 任元,王卫杰,刘强,等.一种磁悬浮控制敏感陀螺:中国,ZL201510006597.5[P]. 2017-04-28.
[8] Fang J C, Ren Y, Fan Y H. Nutation and precession stability criterion of magnetically suspended rigid rotors with gyroscopic effects based on positive and negative frequency characteristics[J]. IEEE Transactions on Industrial Electronics, 2014, 61(4):2003-2014.
[9] Ren Y, Fang J C. Complex-coefficient frequency domain stability analysis method for a class of cross-coupled antisymmetrical systems and its extension in MSR systems[J]. Mathematical Problems in Engineering, 2014, 14(1):1-11.
[10] Cui P L, He J X, Fang J C, et al. Research on method for adaptive imbalance vibration control for rotor of variable-speed MSCMG with active-passive magnetic bearings[J]. Journal of Vibration and Control, 2015, 3(2):3-9.
[11] Le Y, Wang K. Design and optimization method of magnetic bearing for high-speed motor considering eddy current effects[J]. IEEE/ASME Transactions on Mechatronics, 2016, 21(4):2061-2072.
[12] Han B C, Zheng S Q, Wang Z, et al. Design, modeling, fabrication, and test of a large-scale single-gimbal magnetically suspended control moment gyro[J]. IEEE Transactions on Industrial Electronics, 2015, 62(12):7424-7435.
[13] 刘强, 赵勇, 曹建树,等. 新型微框架磁悬浮飞轮用洛伦兹力磁轴承[J]. 宇航学报, 2017, 38(5):481-489.[Liu Qiang, Zhao Yong, Cao Jian-shu, et al. Lorentz magnetic bearing for novel vernier gimballing magnetically suspended flywheel[J]. Journal of Astronautics, 38(5):481-489.]
[14] Wang C E, Tang J Q. Design and mathematical analysis of a novel reluctance force-type hybrid magnetic bearing for flywheel with gimballing capability[J]. Mathematical Problems in Engineering, 2013, 13(8):147-160.
[15] Xiang B, Tang J Q. Suspension and titling of vernier-gimballing magnetically suspended flywheel with conical magnetic bearing and Lorentz magnetic bearing[J]. Mechatronics, 2015, 28(7):46-54.
[16] Tang J Q, Xiang B, Wang C E. Rotor′s suspension for vernier-gimballing magnetically suspended flywheel with conical magnetic bearing.[J]. Isa Transactions, 2015, 58(12):509-519.
[17] 胡寿松. 自动控制原理[M]. 北京:科学出版社, 2013:77-118.
[18] 韩莉莉, 刘广瑞, 宁祎. 基于劳斯判据的柔性机械臂弹性运动稳定性分析[J]. 机械传动, 2014(8):115-120. [Han Li-li, Liu Guang-rui, Ning Wei. Analysis of elastic motion stability of flexible manipulator arm based on Routh criterion[J]. Mechanical Drive, 2014(8):115-120.]
[19] Aweya J, Ouellette M, Montuno D Y. Design and stability analysis of a rate control algorithm using the Routh-Hurwitz stability criterion[J]. IEEE/ACM Transactions on Networking, 2004, 12(4):719-732.
[20] Garcia M. The Nyquist stability criterion in the Nichols chart[J]. International Journal of Robust & Nonlinear Control, 2016, 26(12):2643-2651.
[21] 魏彤, 房建成. 磁悬浮高速转子系统双频Bode图稳定性分析方法研究[J]. 航空学报, 2007, 28(3):641-646. [Wei Tong, Fang Jian-cheng. Stability analysis method of magnetically suspended high-speed rotor based on two-frequency bode diagram[J]. Acta Aeronautica et Astronautica Sinica, 2007, 28(3):641-646.]
[22] 魏彤, 房建成. 基于双频Bode图设计磁悬浮弹性转子陷波器[J]. 光学精密工程, 2008, 16(5):789-796. [Wei Tong, Fang Jian-cheng. Design of magnetically suspended elastic rotor notch filter based on two-frequency Bode diagram[J]. Optics and Precision Engineering, 2008, 16(5):789-796.]
