一种检校相机曝光同GPS marktime差的直接方法
2018-03-15袁冲陈永超张小惠
袁冲,陈永超,张小惠
(1.武汉航天远景科技股份有限公司,湖北 武汉 430205; 2.武汉警官职业学院,湖北 武汉 430040)
1 引 言
随着无人机测绘遥感技术的普及,高程精度不满足要求或需要大量外业像控点成为制约无人机测绘应用的瓶颈。无人机技术用于基础测绘,特别是 1∶1 000和 1∶500的基础测绘,因基高比小这一先天因素造成的高程精度差的现象极为普遍。为了满足高程精度要求,市场上普遍采用两种工程路线来解决,一是外业大量采集像控点,二是最终成果里的高程点采用全野外方式来采集。无论是哪种方式,解决途径都是加大外业工作量,通过外业的补充来提高成果精度。GPS辅助空中三角测量近几年也开始应用于低空无人机测绘遥感系统,主要用于稀少控制高精度测绘方案上,能显著减少外业像控点的数量[1]。缺点是它对GPS的定位精度要求很高,特别是代表当前低空无人机测绘遥感的最新技术即免像控高精度测绘更是对GPS记录相机曝光点的绝对精度提出了更高要求[2],当前市场上普遍采用双频差分GPS来记录相机曝光点的绝对坐标。在原始数据的获取过程中要求相机同差分GPS之间进行同步,即GPS内部在相机曝光一瞬间记录一个marktime点,后期根据这个marktime点来通过内插方式计算出相机曝光瞬间相机所处的绝对位置。因相机卷帘的工作模式和工艺的问题,通常相机先打开快门曝光,然后才会输出一个曝光信号,通过热靴或其他方式传给其他设备,因此其他设备记录的这个有效曝光时间是有延时的,如果不对延时进行处理,实际上内插出来的曝光点坐标同实际坐标有明显偏差,在满足高精度测绘时这个偏差会直接让最终成果精度超过规范限差。有效测定相机曝光时间同GPSmarktime的延时差,是实现无人机测绘免像控的先决条件,特别是要满足 1∶500的测绘,GPS对有效曝光点的定位绝对误差要控制在 0.03 m以内。通常相机有效曝光到触发GPS记录一个marktime时间点有几毫秒的时间差,在固定翼无人机以 90 km/h的速度飞行时,每一毫秒飞机就能前进 0.025 m,几毫秒可以引入 0.1 m的绝对定位误差,因此精确测定相机有效曝光到GPS记录marktime点之间的时间差在免像控测量中是不可缺少的步骤。
精确测定相机有效曝光到GPS记录marktime点分为间接法和直接法两种,分别称为后验检校和先验检校两种方式,其中后验检校也就是在空中三角测量光束法平差时将延时△t作为一个未知数参与平差解求,对每张影像除了传统了6个外方位元素外,还有1个延时参数△t,共7个未知数,其中△t跟6个外方位元素具有很强的相关性,要精确求得△t则对连接点的质量和分布有很高的要求,因此在弱纹理区域采用后验检校方式会降低△t的精度,进而降低了6个外方位元素的精度,空中三角测量难以达到预期的精度要求。先验检校是采用直接法来测量出延时参数△t,在空中三角测量平差前作为已知数来解算相机曝光点精确坐标,这种方式不受地形弱纹理的限制,能有效保障空中三角测量精度。本文采用计算机内部高精度计时器和中速旋转电机等硬件,提出了一种直接测量法测量出相机有效曝光到GPS记录marktime点之间的延时△t。
2 检测原理及硬件组成
为了将GPS定位相机曝光位置精度提高到 0.03 m(3 cm)以内,至少需要将延时△t精度提高到毫秒(ms)级,因此采用的尺度精度要优于毫秒级,为了提高本方法的普及性,降低方法对器材的要求,本方法采用计算机内部计时器计时。为了模拟相机航拍时相对地面的运动状态,本方法采用相机固定不动来拍摄中速电机转盘旋转过程产生的相对位置变化来检测延时。因此本方法除了被检测主体相机外还需要以下硬件软件条件:
2.1 计时器DataTime.Now.Ticks
DataTime.Now.Ticks是Windows系统.net框架下自带的计时器,其中Ticks的计时单位为100纳秒(ns),每台计算机的DataTime可能有所不同,但本方法只需要计算前后计时之间的时间差,即是相对时间,无须绝对时间精度,Ticks的计数精度可以精确到本方法所需精度的万分之一倍,因此完全满足方案需求而无须专业的计时器。本方法只需精确到1/10毫秒(0.1 ms)即可。
2.2 物理信号接收器COM端口
计算机COM端口是作为计算机通信的一种标准接口,COM端口除了可以完成标准通信功能之外,因9针脚的分工不同,如图1所示,可以用5V~12V高低电平来触发针脚来实现计时,对不同针脚的触发可以分别记录起止时间等[3]。具体实现时可以由计算机通过4pin来提供所需电压和电流。
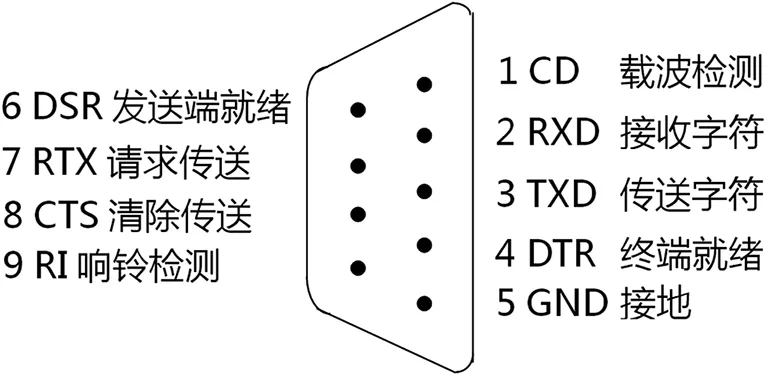
图1 COM端口针脚
2.3 热靴信号
当前无人机稀少控制航测或免相控方案均是采用闪光灯热靴信号触发双频差分GPS来记录曝光时间。相机在曝光瞬间,热靴可以产生一个电流通断信号,可以通过通断信号向外界传递它正在曝光的这一信息,GPS在电流通断变化一瞬间记录一个marktime点作为相机曝光的时间。
2.4 中速电机加霍尔传感器
电机上附加一个带有标记的转盘,如图2所示,转盘外有一个不随转盘转动的圆环套,霍尔感应器固定在圆环上,跟霍尔感应器配套的永磁铁固定在转盘上,永磁铁到转盘中心做一标记线,标记线宽度以刚好拍照成像清晰为宜,不宜过宽。圆盘表面颜色和标记线颜色刚好成反色为宜,形成明显色差,比如白色和黑色。霍尔感应器在本方法中工作原理如图3所示:
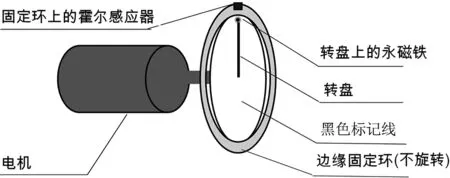
图2 电机转盘与霍尔感应器

图3 霍尔开关通断
圆盘旋转的每一圈中,霍尔感应器仅有如图3(中)所示位置的一次通路,圆盘在其他状态下霍尔感应器均是断路状态[4](假定圆盘顺时针旋转,下同)。
2.5 本方法的工作原理
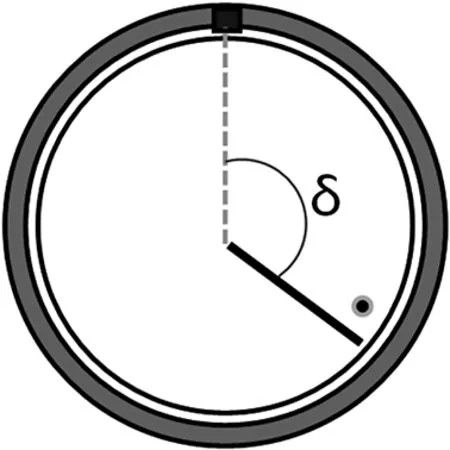
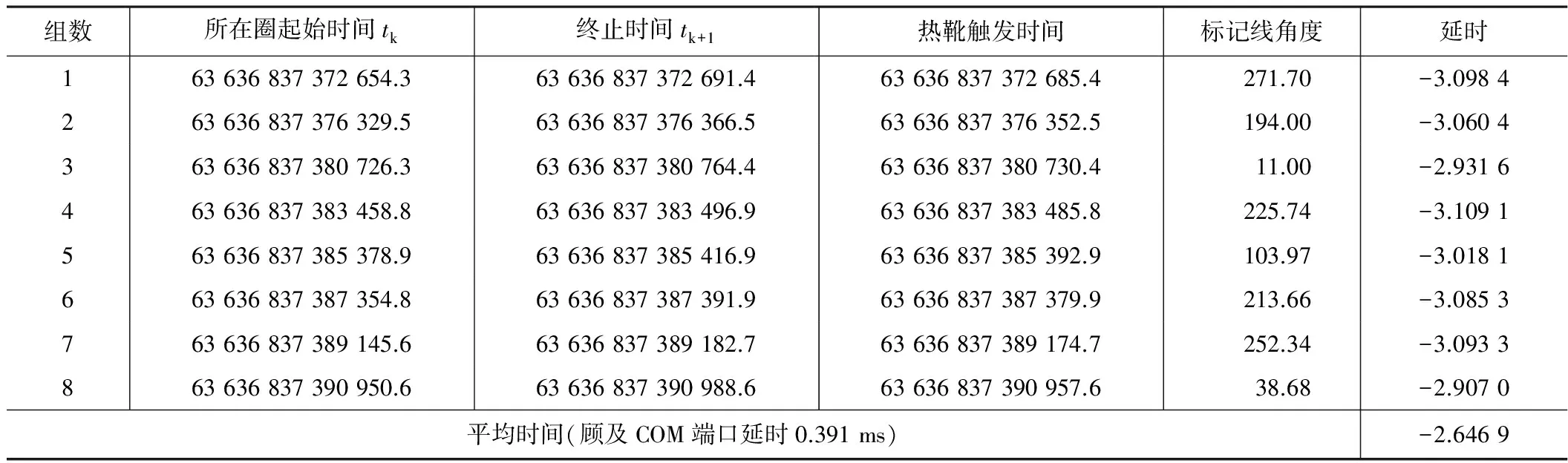
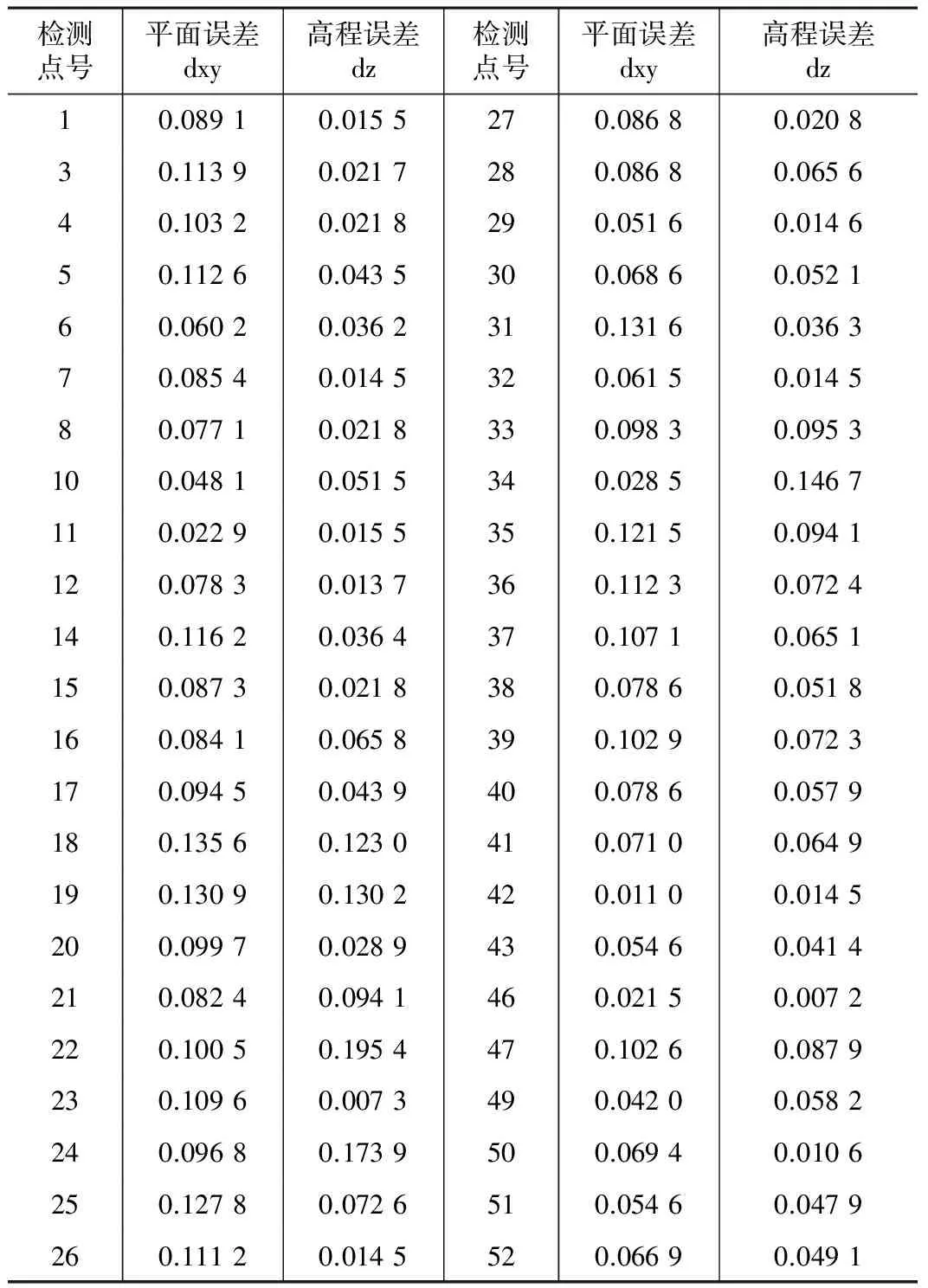
接通电机电源,待转速稳定后,电机带动转盘旋转,霍尔感应器每形成一次通路时,电流信号通过COM端口进入计算机,计算机记录电流信号传入时间tn(n=0,1,2,3……)。相机清晰对焦到圆盘,在电机正常工作时对圆盘拍照,相机曝光同时通过热靴将拍照信号传入COM端口,电路示意图如图4所示。计算机记录热靴传出的相机拍照信号tp1,通过拍照后的影像,如图5所示,量测出标记线的角度δ(单位为:度),从tn中找出tp1所在的tk和tk+1,满足:tk≤tp1 图4 COM端口连线 图5 角度量测 曝光时刻tp2可以通过如式(1)计算: tp2=δ*(tk+1-tk)/360+tk (1) 相机曝光同marktime间的延时△t=tp2-tp1,通常tp2 (1)COM端口延时检测 由于Windows操作系统为多任务的非实时操作系统,通过串口触发的计时受到非实时操作系统的影响,同时串口通信的本身物理特性和接口控制原理决定了串口通信是有延时的,在需要高精度延时测定时,串口通信的延时不能忽略[3]。通过图1所示COM端口中的4pin和1pin形成一个闭合电路,由4pin输出电流信号,1pin检测电流信号,测试计算机COM端口的信号延时,为后续的测试提供修正值。实验时为了尽可能地降低多任务的影响,在多核处理器上单独开一独立线程用于检测串口通信延时,并且结果取1000次测试的平均值。 (2)相机设置 本方法在测试时所选用相机为当前市场上广泛采用的用于低空航空摄影测量的D810相机和最大光圈为1.4的 35 mm定焦镜头。实验时为了尽可能还原航拍时的状态,相机曝光1/1 000秒,光圈5.6,为了成像目视清晰,ISO6400,虽然成像有噪点,但不影响在照片上目视检测标记线。将相机的热靴线做改装,将热靴输出信号分别接入4pin和6pin,4pin为电流信号输出端,6pin为信号检测端。不同于COM端口延时检测,6pin根据热靴工作原理,检测的是电流断开时间,此时间为热靴输出信号时间。 (3)霍尔感应器设置 霍尔感应器有3根线,由外部电源供电,分别为电流进线(通常为正极)、电流出线(通常为负极,并且还可以接地)和信号线,当霍尔感应器接收到足够强的磁信号时,感应器的信号线由断路状态以纳秒级的速度切换成通路状态,信号线输出同电流进线同等强度电压信号,将该信号接入到8pin上,同时电流输出线接入到5pin(负极,接地线)上,使外接电源装置在8pin和5pin上形成一个闭合通路。 (4)电机设置 为了确保相机在上述参数设置条件小拍摄的影像上标记线成像清晰,电机转速越低越好,但要确保能精确测定影像有效成像的时间,电机转速越快越好,因此需要在转速上找到一个相对平衡点。经多次测试,电机有效转速在1 500转/分钟到2 000转/分钟的转速时可以取得比较理想的平衡。 (5)测试方法 先将相机离转盘越1 m距离,对好焦,然后开启COM端口检测,检测1 000次,取平均值作为COM端口的延时。然后开启电机,调节电流强度,待转速稳定在2 000转/分钟左右时,开始手动相机快门连续拍照,本次拍照共8张,相邻两张间隔大于 1 s。最后根据式(1)计算出△t,实际中需要考虑COM端口延时△t0,最终△t按如式(2)计算: △t=tp2-tp1+△t0 (2) 笔者对所有测试以及检测代码是采用C#完成,其中端口信号检测用到了.net中的关键类库SerialPort类,为了尽可能降低测试受外界干扰,所有测试程序均是在主线程外单独开启线程来完成的。 在正式测试前多次测试COM端口自身延时△t0,每次测试1 000次,笔者电脑COM端口△t0基本稳定在0.4毫秒(ms)左右,同计算机当时所处的任务状态有关,因此实际实验时以拍照前实测的1 000次平均值为准,本次实验时测试为 0.391 ms。测试完COM端口延时后,开启电机,待电机转速稳定后,一共拍摄了8张影像,图6为部分所拍影像图: 图6 角度标记绘制 拍摄完后,先用绘图软件将每张影像上标记线和参考点(与霍尔感应器相同位置)到转盘中心的连线绘制出来,然后用专业量测角度软件(本次采用武汉航天远景公司矢量采集软件FeatureOne)量测出标记线角度。每一转均有一次起始时间和终止时间,本次测试每一转所需时间约为 38 ms,延时预估时间一般为几毫秒,因此可以认为热靴触发时间绝大部分跟有效拍照时间是在一个完整的有效圈中,只有极少数会出现热靴记录时间会同拍照影像不在同一圈,即影像是在上一圈拍摄的,热靴是在电机转到下一圈中触发,碰到此情况,基于电机速度稳定了导致相邻两圈速度不会出现明显突变这一条件,即认为前后两圈转速不变,可以将影像量测角度减去360°来归一到同一时间圈中来。最终测试数据如表1所示: 测试8组数据及时延结果 表1 在不考虑COM端口延时情况下,两者延时△t=-3.037 9 ms,考虑COM端口延时情况下,两者延时△t=-2.646 9 ms。在无人机以 90 km/h的飞行速度飞行时,0.391 ms带来的误差是ds=0.391×25/1000=0.009 775 m,约等于 0.01 m,而 3 ms带来的误差是 0.09 m。因此在大比例高精度测绘中,例如 1∶500基础测绘中,COM端口延时是不可忽略的,△t应取值 -2.646 9 ms,在精度要求稍低的测绘项目中,如 1∶1 000及更小比例尺测绘中,COM端口延时可以忽略。最后笔者用在智能鸟武汉试飞场对应地面航拍分辨率约为 0.05 m航片进行了无像控空三加密,仅利用顾及延时△t=-2.646 9 ms解算的GPS进行无像控纯GPS空中三角测量,测量结果进入立体测图检测精度,实验采用如图7(左)所示共52个点中的46个地物标志明显的点进行精度检测,标志如图7(右)所示。最终立体测图精度检测结果如表2所示: 图7 检查点检测 立体测图中46个检查点精度检测结果 表2 从上表可看出在经过延时△t改正后解算的GPS免像控空中三角测量精度完全符合 1∶500航测内业规范精度要求[5],验证了本方法检校的△t精度可靠,因此可以得出本方法检校延时△t可靠这一结论。 在检测过程中,对焦清晰、标记线特征明显、转速适中和角度量测准确是影响测试结果的关键因素。本方案需要基于有效曝光的影像来量测角度,因此成像清晰如否关系着角度量测的准确性。标记线色彩需同转盘自身色彩能明显区分开来,并且标记线在成像清晰的情况下尽可能地细小,在后期量测过程中标记线在圆盘边缘由于像移的影响会明显模糊化,因此量测时取影像上标记线成像的中线为标记线的实际位置。在1/1000秒的快门速度下,经测试转速不易过快,否则标记线成像完全模糊化,不便于精确量测角度。最后角度量测需采用专业软件来处理,并且事先最好先将参考点和标记线矢量化,以尽可能地减小人为量测误差。 本方法采用设备简单,成本低廉,生产单位可就地取材,采用类似于相机畸变先验检校,对相机曝光到GPS产生marktime点的延时进行直接的先验检校,可以在后续免像控空中三角测量中不严格依赖连接点的质量和密度,将外方位元素同延时△t解耦,有效提高了免像控方法的对地形适应性,提高了免像控的精度,结合航飞及后续处理成果表明本方法测试精度可靠。本方法主要是测定相机有效曝光到输出热靴信号之间的延迟,并没有解决GPS内部在接收到热靴信号到产生marktime点的纯GPS设备内部的延时测定,但通过Windows系统的COM端口测定,发现COM端口延时比较小,COM端口的延时会引入 0.01 m的误差,实际生产中可以根据项目要求来决定是否要做COM端口的延时改正。针对单反相机在曝光方式存在签帘卷门和后帘卷门两种工作方式之分,本方案均适用。后续的工作可以继续研究如何精确测定GPS自身记录marktime的延时以及本方案的进一步集成化工作,如可以进一步采用COM端口输出电流作为霍尔感应器的供电电流等。 [1] 袁修孝,高宇,邹小容等. GPS辅助空中三角测量在低空航测大比例尺地形测图中的应用[J]. 武汉大学学报·信息科学版,2012,37(11):1289~1293. [2] 狄桂栓,沈彪群,高波等. 免像控无人机航摄系统在公路带状地形测量中的应用与精度分析[J]. 测绘通报,2017(02):159~160. [3] 何峰,郑勇,骆亚波等. 计算机串口记时延迟的测量与分析[J]. 测绘科学,2009,34(3):41~43. [4] 陈育中. 霍尔传感器测速系统的设计[J]. 科学技术与工程,2010,10(30):7529~7532. [5] GB/T 7930-2008. 1∶500 1∶1 000 1∶2 000地形图航空摄影测量内业规范[S].
3 延时△t的测试方法和结果
3.1 测试方法
3.2 测试结果及分析


4 结 论