一种多旋翼无人机三轴稳定云台的设计*
2018-03-15昆明理工大学建筑工程学院云南昆明650500
宋 科(昆明理工大学 建筑工程学院,云南 昆明 650500)
0 引 言
近年来,随着飞行器控制技术、微型传感器技术和高度集成处理器技术的快速发展和推广应用,多旋翼无人机逐步向高效、多功能化方向发展,因其具有操作简单方便、易于装配维修和结构简单等特点迅速成为无人机中的新贵,并广泛应用于航空航海、军事、警用民用、农林等多个领域[1-4]。稳定云台作为无人机平台上的重要部件,已被世界各国广泛研究与应用。例如,以色列军方研制的MOSP云台系统,英国的Phoenix云台系统,美军“捕食者”战略无人机上装备的“天球”云台系统等[5]。稳定云台可搭载多种传感器和光学精密仪器,其主要用于民用航拍、地形测绘、反恐侦察、目标跟踪识别等用途[6]。然而,随着多旋翼无人机的快速发展和对其功能要求的不断提高,一些传统的稳定云台已经不能满足其发展的需要。首先,多旋翼无人机在高速移动或者转向的情况下,机身往往受到来自外部环境产生的振动和偏移,从而造成航拍图像的不稳定,画面出现横纹、断层现象甚至偏离拍摄目标。其次,由于传统云台重量较大且结构稳定性不佳,在对无人机造成较大负荷的同时也不利于航拍画面质量的提高。
因此,为了更好地实现对航拍目标的不间断、高质量的实时视频画面传输,本研究借助数字化设计技术和计算机仿真技术,以小巧、易装配及轻量化为目标导向设计一款以多旋翼无人机为搭载平台的小型三轴稳定云台,并对其结构进行静力学校核和动力学分析。
1 云台的结构设计
无人机稳定云台为了满足功能需求应该具有以下两个方面的特点:首先,根据遥控信号及时调整系统姿态。其次,处理并应对来自无人机飞行过程中产生的振动并随即做出位移补偿以便达到稳像的功能。
云台控制系统主要由主控器电路板、MPU6050传感器、电机驱动器和直流无刷电机组成。主控器电路板安装在悬架上负责处理来自三轴的加速度与姿态信号。首先,在云台工作时受到来自外部环境产生的振动和偏移时,安装在相机壳体内的MPU6050姿态控制传感器将感知并实时捕捉相机壳体运行过程中产生的偏移角度和横轴、纵轴、俯仰轴3个坐标轴上的角度偏移和震动状况,并将相应的角度和加速度信号传递给主控器电路板[7],通过主控器电路板中的姿态解算器模块与PID控制器模块的处理,将反馈信号传递给三轴上的电机驱动器输出PWM信号,随即对无刷直流电机进行横轴、纵轴、俯仰轴上的位移和角度的调整,以此达到稳像的目的。

图1 云台控制系统流程图
为了满足上述要求,云台往往需要一配套的机械结构来实现其具体的功能。云台结构如图2所示。
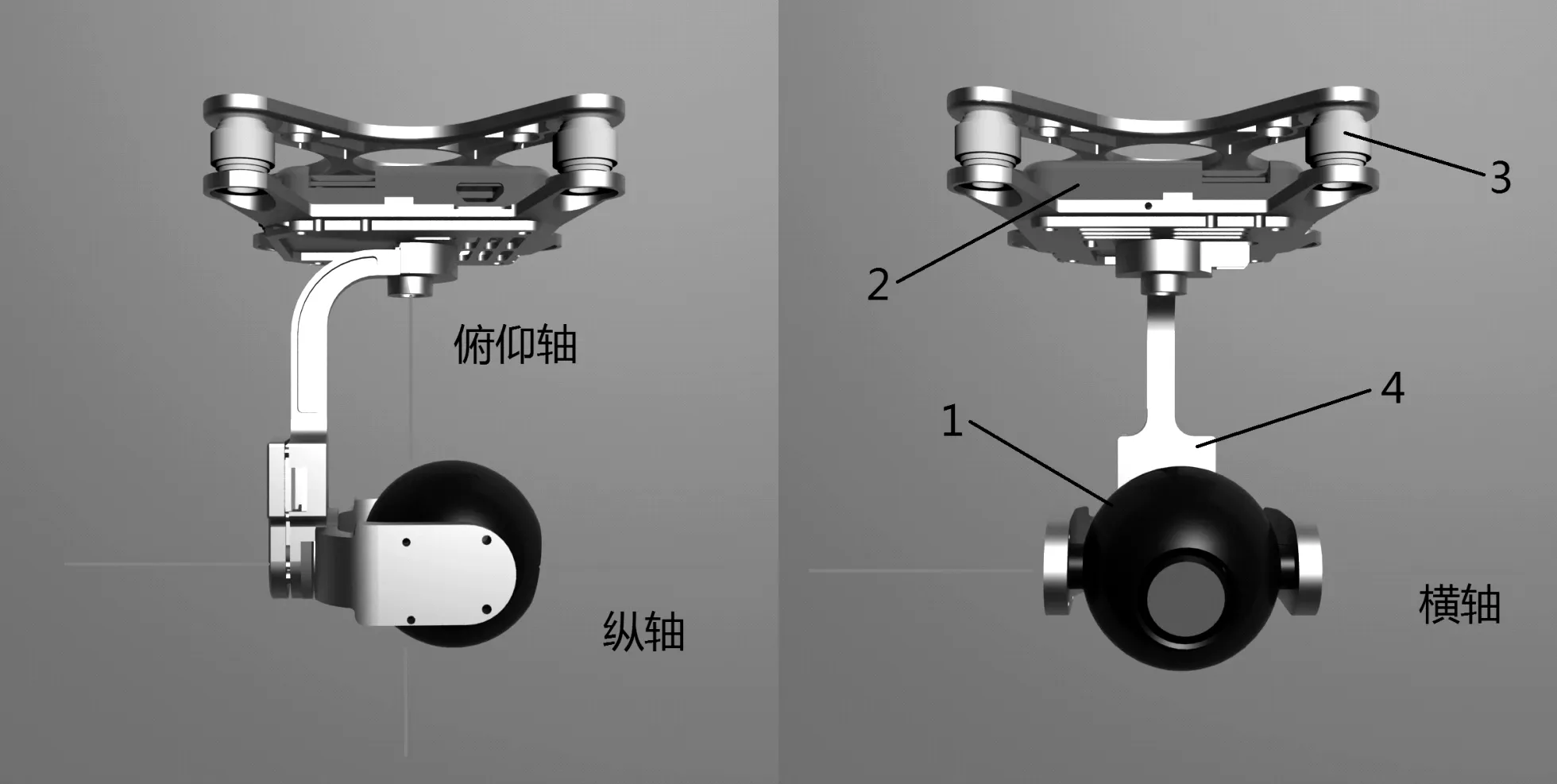
图2 无人机云台结构图
其主要结构设计如下:
(1)相机壳体结构(图2中标号1)。起到保护相机、传感器等电子元件的作用,内部安装微型CCD高清相机来传输高质量的图像信号;
(2)支撑结构(图2中标号2)。与无人机机体直接连接,作为云台系统的底座,其主要功能是保护主控器电路板、固定安装俯仰电机和支撑云台的其他零部件;
(3)减振结构(图2中标号3)。通过柔性结为云台吸收来自无人机在运行过程中产生的振动;
(4)旋转连接结构(图2中标号4)。为云台提供3个轴方向上旋转支撑和动力,各轴节点上装配有符合规格的微型直流无刷电机以确保云台系统的位移补偿,同时为其余电子元件和无刷电机提供保护。
1.1 云台主体结构的材料选择
除了相机、无刷电机和其他电子元件外,云台的主体结构还需要大量的支撑零件来进行连接与固定。这些零件通过Inventor软件设计出来,之后将通过数控机加工成型,构成云台的主体结构。本研究设计的云台不同结构件共有13件,通过对这些零件的结构和用途的分析来选择适合的材料,材料的性能好坏将直接影响到整个系统的运行。因此,在选择材料的时候应考虑如下几点要求:
20世纪80年代以来,越来越多的摄影艺术家开始采用“设计”的方式进行创作。他们有意识地跟随广告业照亮的道路,运用想象与才智挣脱了古典现代主义的束缚。他们不是在现实世界中寻找主题,直接“拍摄”,而是选择自行“创造”一个全新的视觉世界。
(1)材料必须易加工成型,便于装配;
(2)云台在工作状态下承受交变载荷和随机振动的多重影响,因此在材料的选择上必须使用比强度较高的材料,这样既可以满足强度、刚度和耐久度的要求,同时也满足了云台轻量化的设计要求。
因此,本研究选择铝合金作为云台结构中直接承载零件的材料和起保护作用的相机壳体的材料,而选择ABS作为云台结构间接承载和不承载的零件材料,同时选择橡胶作为柔性结减震部分的零件材料。定位轴和滚珠轴承采用定制的2Cr13专用材料。
3种材料的力学性能如表1所示。

表1 3种材料的力学性能
云台主要结构件材料匹配如表2所示。
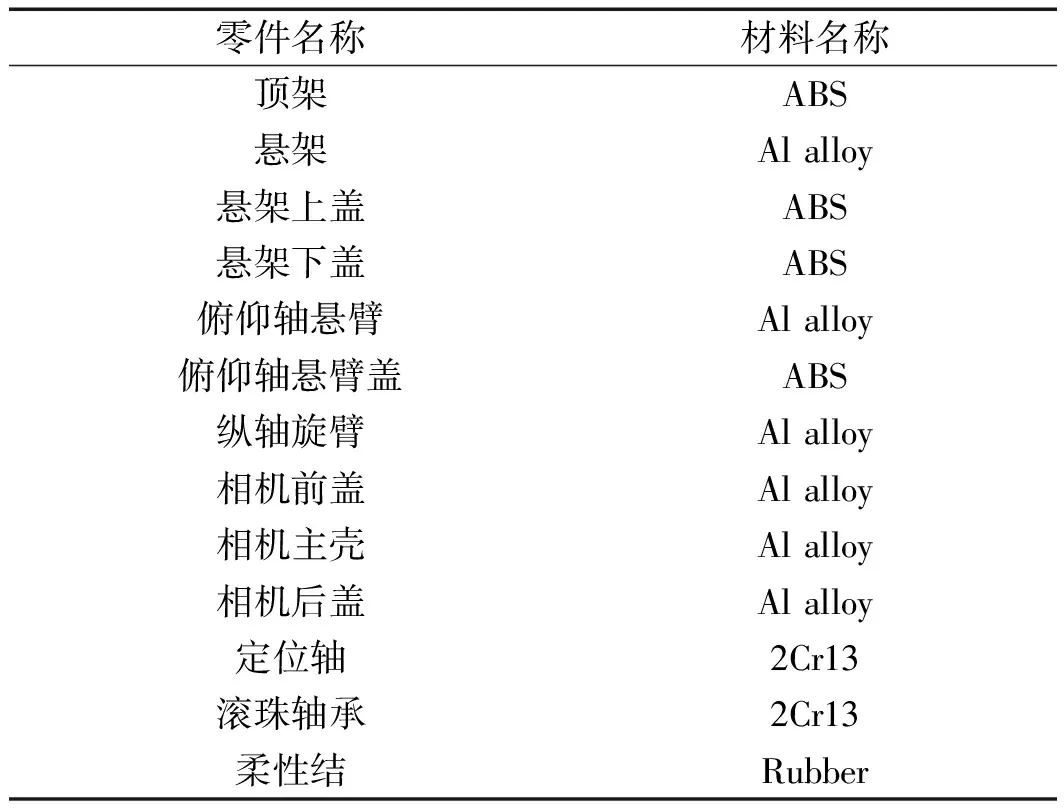
表2 零件材料匹配
1.2 云台相机壳体结构的设计
相机壳体结构的设计既要考虑实用性,也要考虑美观性,因此本研究采用球形壳体的设计作为安装CCD相机和传感器的载体,避免杂质和灰尘对这些精密元件的损害。同时,在壳体上预留出一定数量的孔作为相机SD与HDMI连线接口以满足航拍、转动、扩展等要求。壳体内部除了保证相机等元器件的安装外,还需在横轴方向上安装内置的微型无刷电机以作为横轴上的动力源。考虑到零件的易加工性,相机壳体结构分为3个零件:相机主壳、相机前盖、相机后盖,前盖部装有树脂镜片。其中后盖与主壳连接方式为螺钉定位配合,前盖与主体连接方式为粘结剂粘贴。相机壳体与旋转结构通过壳体两侧的同轴进行定位安装。
1.3 云台旋转连接结构的设计
旋转结构主要零件分别为纵轴和俯仰轴方向上的悬臂结构和其附属连接盖子。旋转连接结构主要负责横纵轴与俯仰轴方向上的转动,本研究采用对称双臂设计以加强云台旋转自稳性,虽然这样设计比传统的单臂结构重量上略有增加,但这样重量较大的相机及传感器元器件的载荷就会落在对称的横轴上,这有助于减小产生的扭矩,提升整个系统的结构稳定性,同时也降低了无刷电机的补偿能耗,外观上也比单臂结构更为美观。
1.4 云台支撑结构及减震结构的设计
支撑结构主要零件有连接固定无人机的顶架和安装固定和保护俯仰电机和主控电路板的悬架及其附属连接盖子。而减振结构主要起到了吸收来自无人机在运行过程中产生的振动的作用。本研究采用橡胶制成的中空柔性结作为云台的阻尼减振器。云台在振动过程中柔性结将克服振动阻尼通过自身的变形吸能从而达到减小振动的目的,从而防止云台上其他结构受到损伤。根据云台的大小选择适合的柔性结安装到顶架与悬架之间的合适位置。需要注意的是在实际使用过程中,柔性结在长时间下经过反复形变,容易产生裂痕。如果不及时更换,裂痕会继续扩展直至完全损坏,影响到整体系统的安全。因此,为了防止柔性结脱落或者断裂,需在柔性结的中空位置插入安全销钉(销钉的长度要大于柔性结的最大拉伸量)。另外,支撑结构与旋转连接结构通过俯仰电机轴及微型滚针轴承进行连接。
1.5 云台结构的装配
最后,各零件在Inventor中装配完成,在确保装配体各零部件间没有干涉后分别对云台装配体进行重力分析和运动仿真检测。结果表明:云台的设计达到了预想的要求。
云台系统总重约190 g;俯仰轴最大转动角度±30°;横轴最大转动角度±45°;纵轴最大转动角度±30°。
2 云台的载荷分析
本研究将Inventor装配体模型导出为IGS文件格式后,再导入到ANSYS Workbench中[8],按表2所示的材料匹配进行云台各结构件的材料属性赋予。为了简化计算,笔者将相机壳体结构和部分其他非主要结构及电子元器件、CCD相机、电机等重量置换成载荷以进行分析,忽略定位轴和滚珠轴承对云台结构微小的影响。由于本研究设计的云台零件具有不规则的外形,在进行网格划分时采用自适应实体单元进行网格划分,设置全局网格单元尺寸为2 mm,同时为了尽可能地提高仿真计算的精度,笔者对云台结构中旋转连接部分这些可能出现应力集中的部位适当减小网格尺寸。最后划分完成后的云台模型节点Nodes总数为132 083个,单元Elements总数为67 416个。在云台的载荷设置过程中,除了云台主体结构的自身重量外,还需在一些关键连接处加载替换后的载荷。本研究在顶架的4个固定孔轴处(A处)将3个方向的位移自由度设置为0,模拟顶架与无人机机体的约束固定;在纵轴旋臂的定位轴上(B处),施加一个沿Y轴向下0.6 N的作用力,模拟相机壳体、相机、横轴电机和其他电子元器件所产生的重力;在悬架内侧平面上(C处),施加一个沿Y轴向下0.4 N的作用力,模拟主控电路板和俯仰电机所产生的重力;在俯仰轴悬臂的下侧(D处),施加一个沿Y轴向下0.3 N的作用力,模拟纵轴电机和传感器所产生的重力;最后在全局坐标系中设置重力加速度,这将产生一个大小为9.806 65 m/s2的加速度,定义其沿Y轴向下模拟云台结构受到的自重,同时考虑到无人机运行时会产生一定的水平惯性力,因此假设无人机以10 m/s2的水平加速度飞行,在全局坐标系中设置一个相应加速度(F处),方向沿Z轴负方向。
简化后的云台模型有限元网格划分及载荷加载示意如图3所示。

图3 有限元网格及载荷示意图
云台静力学等效应力和变形如图4所示。

图4 静力学应力及变形图
结果表明:最大应力发生于旋转结构连接处。其最大应力为3.34 MPa,该部位材料为铝合金,其屈服强度极限为255 MPa。可以看出,图4中的最大等效应力值要远远小于材料的屈服极限值。云台也产生了微小形变,但对于整个系统而言,0.14 mm的最大形变对于三轴稳定平台的正常使用不会产生任何不良影响。
3 云台的模态分析
具有多旋翼电机组的无人机在运行状态下产生的振动较固定翼无人机要复杂。首先,多旋翼无人机在运行时直接受到来自各电机所产生的影响,这种影响也会随着电机数量的增加而变得更复杂,多个电机同时运行时所产生的振动将直接积累到整个系统上。其次,各旋翼的转速会存在微小的差别,多旋翼转动时不能完全抵消各自所产生的扭矩,同时在户外飞行时各旋翼由于空气来流情况复杂,这也将导致升力不平衡的现象。所以,多旋翼无人机会同时受到来自自身旋翼转动所产生的影响和来自外界空气流动的影响。为了确保所设计的云台能满足复杂振动工况下的要求,要进行动力学模态分析来确定结构的固有频率和振型等模态参数[9]。
在实际情况下,传递给云台的振动频率一般集中于50 Hz~70 Hz之间[10-11]。因此,笔者重点分析集中在这一区间段的模态振型,对云台结构进行六阶模态分析。云台的六阶模态云图如图5所示。

(a)一阶二阶振型(f1=40 Hz Max-Deformation1=170 mm,f2=42 Hz Max-Deformation2=168 mm)

(b)三阶四阶振型(f3=84 Hz Max-Deformation3=231 mm,f4=99 Hz Max-Deformation4=210 mm)
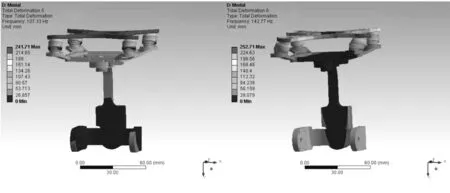
(c)五阶六阶振型(f5=107 Hz Max-Deformation5=241 mm,f6=142 Hz Max-Deformation6=252 mm)图5 云台六阶模态云图
可以看出:一阶、二阶振型是弯曲振型,结构沿纵轴弯曲,固有频率和最大位移都十分接近。三阶、四阶也是弯曲振型,但结构沿横轴弯曲。五阶和六阶振型是扭转振型,结构沿俯仰轴扭转,可以看出结构受到扭转后变形较大,最大位移均集中在顶架和柔性结处。同时可以看出:易产生共振的频率范围介于结构的第二阶与第三阶固有频率之间,超过第三阶后结构的固有频率都十分远离这一阶段,因此不会产生共振。说明振动对云台工作不会产生较大的影响,整个设计是合理可靠的[12-13]。
为了进一步说明柔性结对云台减震能力的影响,未使用柔性结的云台固有频率和最大位移如表3所示。

表3 未加入柔性结的模态参数
可以看出:未加入柔性结的云台各阶振型频率远超加入柔性结后的云台频率,每阶模态对应的最大位移量也相对提高了不少。回顾图5的六阶振型图,云台结构的最大位移处均出现在顶架和柔性结上,而下方的安装相机和电机的结构未出现较大位移偏移,云台的稳定性十分良好。由此可以看出,柔性结对云台整体减振效果起到了关键作用。
4 结束语
本研究使用Inventor自主设计了一种多旋翼无人机三轴稳定云台,并对云台姿态补偿原理和各结构零部件的设计进行了分析说明,同时通过ANSYS Workbench对结构进行了静力学强度刚度校核和动力学模态分析,得到的相关仿真结果佐证了该设计是合理可靠的。
由于本设计的云台零部件结构相对比较复杂,具有不规则外形,加之尺寸较小,在加工上存在一定的难度。因此在下一阶段,本研究将通过3D打印或精密铸造来搭建实际的云台装配体,之后再通过高性能数据信号采集仪得到无人机运行过程中云台的真实模态参数,并与仿真数据进行对比,最大化地降低设计误差,为后续云台系统的优化升级和减震技术的研究提供参考。
[1] 王纯阳.多旋翼无人机用单载荷光电稳定平台结构设计[D].长春:中国科学院长春光学精密机械与物理研究所,2015.
[2] 申 斌,吴一波,林冬生.旋翼机的发展与应用[J].科技传播,2013(23):145-146.
[3] SAMANO A, CASTRO R, LOZANO R, et al. Modeling and stabilization of a multi-rotor helicopter[J].JournalofIntelligent&RoboticSystemsTheory&Applications,2013,69(1-4):161-169.
[4] 王大鹏,王茂森,戴劲松,等.四旋翼飞行器悬停建模及控制[J].兵工自动化,2017,36(5):92-96.
[5] 成 刚,杨随虎.无人机机载光电系统综述[J].应用光学,2005,26(4):1-4.
[6] 刘 瑞,蒋 蓁,雷小光.小型机载云台结构设计和分析[J].机电工程,2010,27(2):5-7.
[7] 王成波,戈振扬,贺 勇,等.基于STM32F4的机载三轴云台控制器设计[J].中国农机化学报,2016,37(8):171-175.
[8] 许京荆.ANSYS 13.0 Workbench数值模拟技术[M].北京:中国水利水电出版社,2012.
[9] 胡海岩,孙久厚.机械振动与冲击[M].北京:航空工业出版社,2002.
[10] 杨笑天.森林防火小型无人机总体设计与仿真研究[D].哈尔滨:东北林业大学机电工程学院,2016.
[11] 刘 峰,高鸿渐,喻 辉,等.基于有限元的四旋翼无人机碳纤维结构优化设计与固有模态分析[J].玻璃钢/复合材料,2017(4):17-23.
[12] 刘 鹏,曾 涛,谢君科,等.自适应回弹填料密封结构设计及有限元分析[J].流体机械,2015(2):29-31,65.
[13] 顾根泉.无人机车载液压弹射系统研究[J].液压气动与密封,2016(1):40-44.
