基于土壤比阻的大功率拖拉机变权重力位综合控制研究
2018-03-13王素玉李瑞川徐继康刘延俊
王素玉 刘 站,2 李瑞川,2 徐继康,3 刘延俊
(1.山东科技大学机械电子工程学院, 青岛 266590; 2.山东五征集团有限公司, 日照 276800;3.日照海卓液压有限公司, 日照 276800; 4.山东大学机械工程学院, 济南 250100)
0 引言
大功率拖拉机是现代农业生产中重要的动力机械,电液悬挂技术是拖拉机研究领域的关键技术[1]。电液悬挂系统承担着农具牵引、耕深控制等重要功能,其性能直接影响作业质量和作业效率[2-3],随着现代农业对精细化作业要求的不断提高,采用一定的控制方法或策略实现耕深的自动控制[4-7],提高作业质量,是研究热点之一[8-9]。
在控制方式上,对力位综合控制的权重系数研究取得了一定的进展,有些学者提出了变权重力位综合控制方法[10-15],但都局限于人工设定权重系数进行对比分析,由于土壤环境的复杂性,基于土壤比阻的权重系数自动控制研究少有报道。本文将模糊PID控制策略与力位综合控制方式相结合,探索一种基于土壤比阻的变权重系数控制方法,以期根据土壤比阻实现权重系数的自动选择与控制。
1 系统控制原理
在土壤环境变化较大的区域,由于地面不平度和土壤比阻变化的影响,犁具耕深和牵引力变化较大,故采用力位综合控制[10]。图1为博世力士乐公司力位综合控制系统框图[16],驾驶员通过控制面板对混合比、耕深、牵引力等参数进行设定,力、位传感器信号经数据融合传入控制器,控制器通过运算输出电信号控制阀口的开度,进而通过控制流量来控制农具的动作。其中混合比(本文设为权重系数)是系统自动控制的关键参数。
目前,对权重系数自动判断与选择的研究很少,需要解决在土壤环境变化较大时,既能保证拖拉机发动机负荷稳定性,还能保证耕深的均匀性[17]的问题。因此,如何根据力、位传感器反馈的信息,利用一定算法对土壤性质进行实时自动判断,确定适应不同土壤比阻的权重系数,以提高作业质量,需要建立模糊PID变权重力位综合控制进行研究。
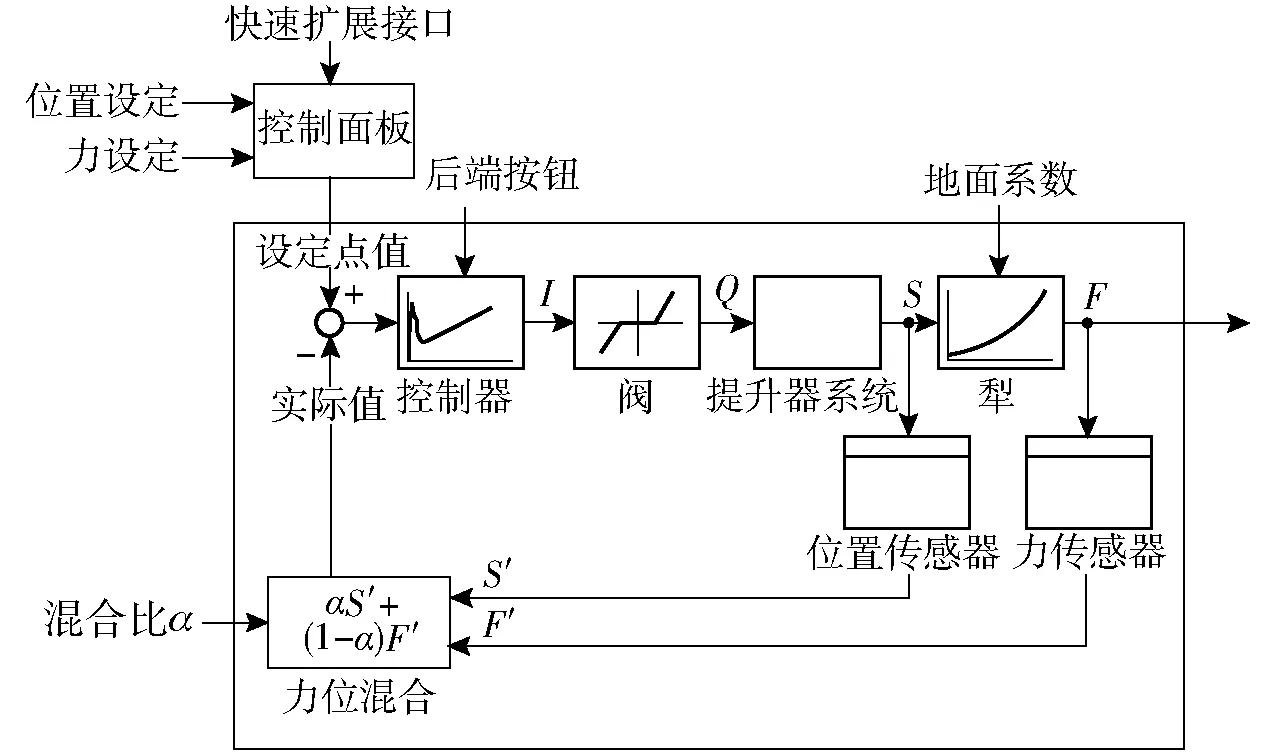
图1 博世力士乐公司力位综合控制系统框图Fig.1 Block diagram of mixed control system of BOSCH
2 控制策略
2.1 输入输出变量及其论域
模糊控制器采用双输入三输出形式,即输入耕深偏差e及偏差变化率Δe,经过模糊推理后输出PID控制中的3个参数修正量ΔKP、ΔKI、ΔKD。为了提高控制精度,将量化等级均划分为7级。其基本论域、离散论域、量化论域以及量化(比例)因子如表1所示。

表1 变量及其论域表Tab.1 Variables and their domain
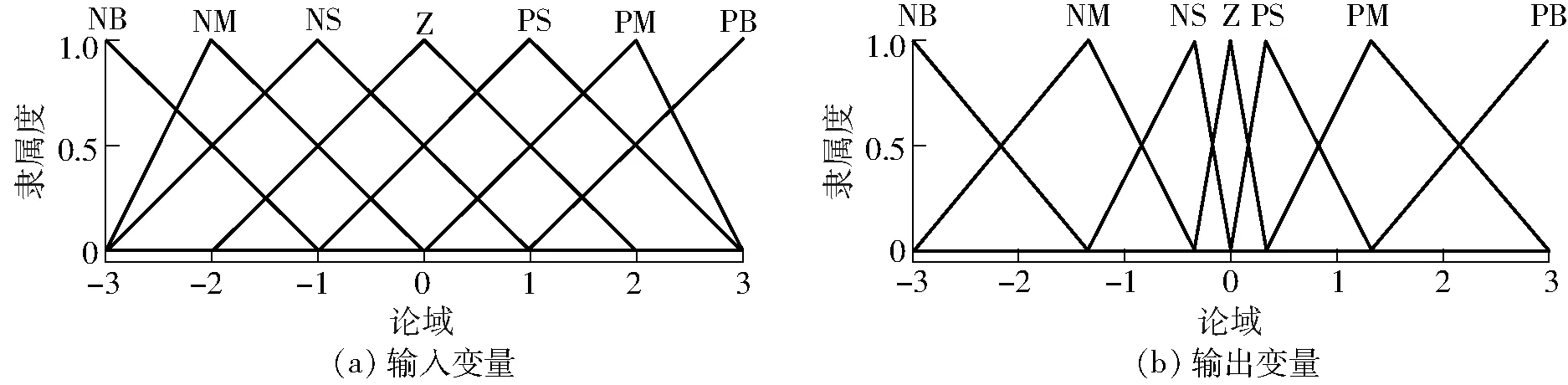
图2 输入/输出变量隶属度函数Fig.2 Input/output variable membership function
2.2 变量论域模糊子集
变量均采用7个模糊子集,分别为“负大”(NB)、“负中”(NM)、“负小”(NS)、“零”(Z)、“正小”(PS)、“正中”(PM)、“正大”(PB),隶属度函数的形状为三角形,其具有运算简单、占用内存小等优点。输入变量隶属度函数采用均匀分布,输出变量隶属函数采用非均匀分布[18]。各变量隶属度函数如图2所示。
2.3 模糊控制规则制定
为了不断修正PID控制器的KP、KI、KD3个参数,结合自整定原则[19],建立表2所示的模糊控制规则。
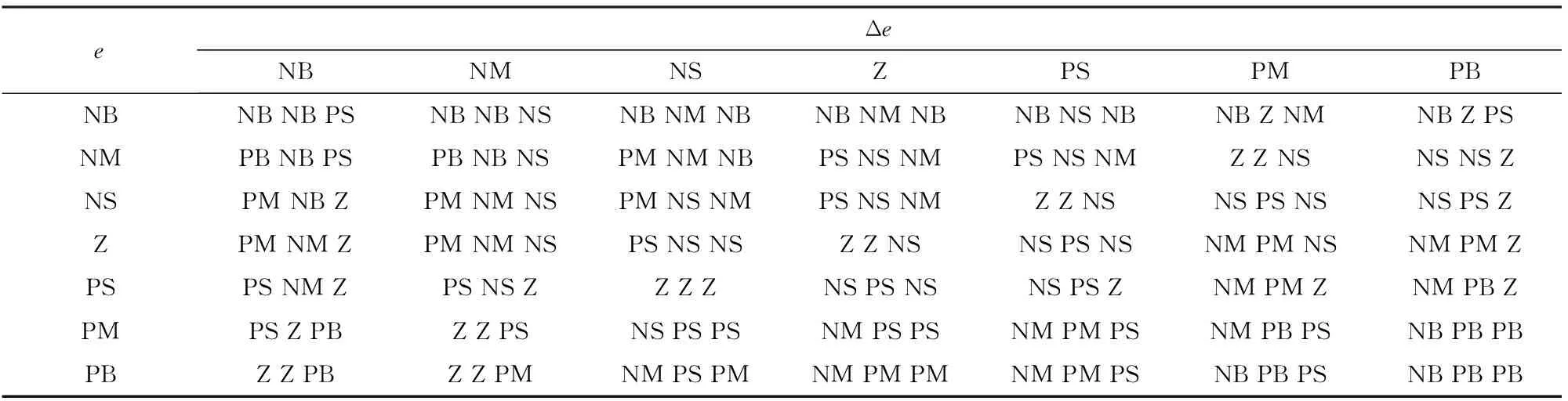
表2 ΔKP、ΔKI、ΔKD模糊控制规则Tab.2 ΔKP,ΔKI and ΔKD fuzzy control rule
注:表中数字资料区域每一栏从左到右分别对应ΔKP、ΔKI、ΔKD的模糊控制规则。
3 模型建立与仿真分析
3.1 传递函数
系统中采用高频响比例换向阀、控制液压缸、悬挂装置以及传感器等元器件,建立数学模型[20-23],以此为基础,建立基于土壤比阻的变权重力位综合控制系统如图3所示,并采用土壤比阻B模拟土壤环境,通过设定不同的权重系数,探寻权重系数与土壤比阻之间的关系,以实现权重系数的自动判断与选择。
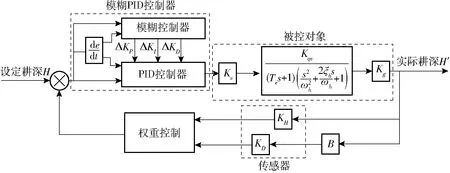
图3 变权重力位综合控制系统框图Fig.3 Block diagram of variable weight mixed control system
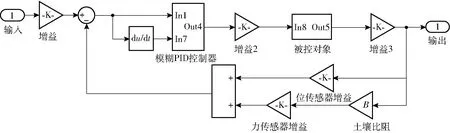
图4 控制系统Matlab仿真模型Fig.4 Matlab simulation model of control system
3.2 仿真模型
根据图3,利用Matlab/Simulink建立控制系统仿真模型,如图4所示。该仿真模型以耕深为输入输出参数,耕深设定为200 mm,通过控制面板输入并转换成电压进行仿真,将力、位传感器信号综合后与设定值进行运算。反馈信号U的数学模型为
(1)
式中H——耕深
F——牵引阻力
b——犁的工作宽幅
2.4 红外指纹图谱的建立 取12批样品,按“2.1”项下方法制样,测定获得红外指纹图谱,见图1~2。从图中可看出,12批滇黄精药材的原始红外光谱图其峰形、峰位大致相同,但吸收峰的强弱存在一定差异,表明12批药材的主要组分相似。采用平均值法获得12批药材的共有模式图谱,见图3。可见3 353.6 cm-1、2 933.2 cm-1、1 623.8 cm-1、1 419.4 cm-1、1 128.2cm-1、1 051.0 cm-1、825.4 cm-1为滇黄精药材的主要特征指纹峰。
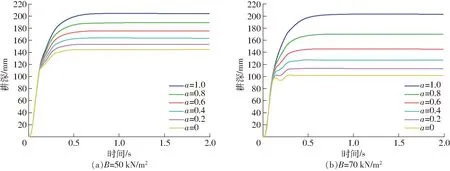
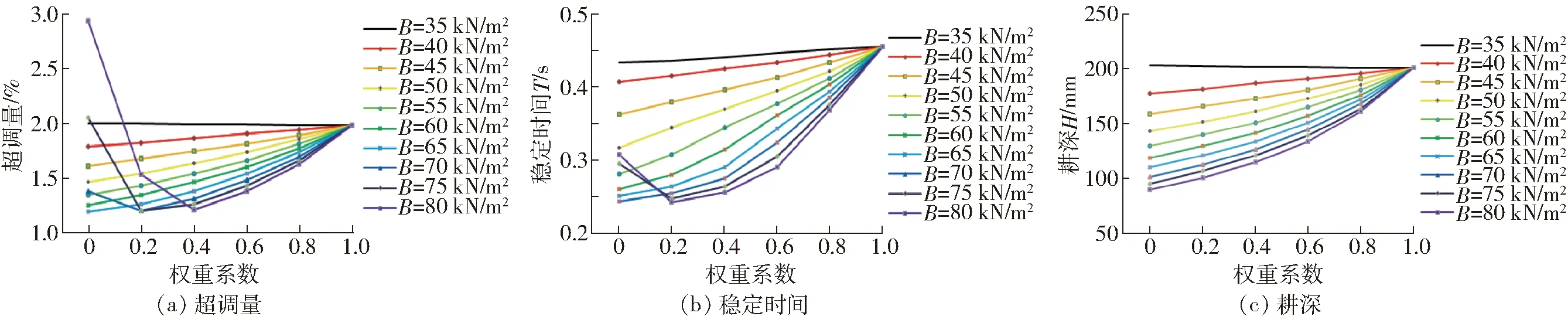
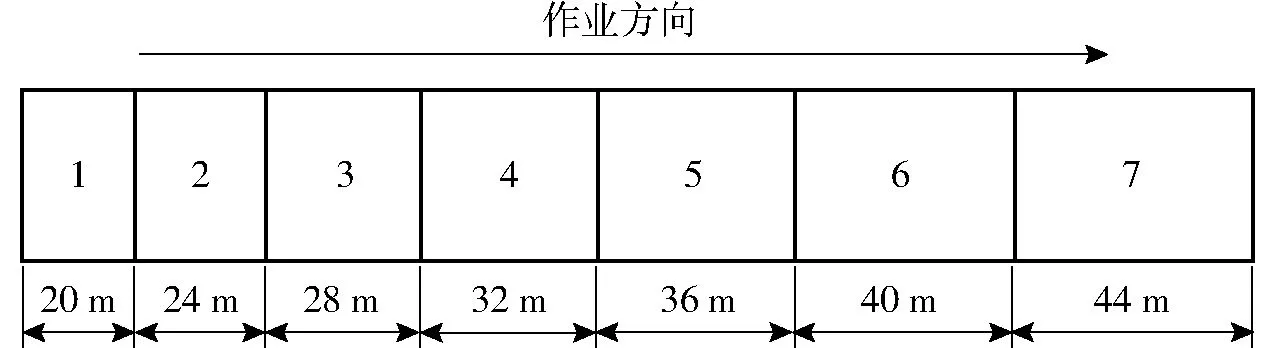
a——权重系数(a=1为位置反馈,a=0为力反馈,0 为了真实反映土壤比阻与权重系数的关系,根据某地区的土壤情况,通过实地测量,确定了5种土壤类型,其土壤比阻分别为:砂土30~45 kN/m2、砂壤土35~60 kN/m2、壤土45~75 kN/m2、粘土50~80 kN/m2、重粘土大于等于80 kN/m2。 在仿真模型中设定B为35~80 kN/m2,通过调节权重系数来研究其对于某种土壤环境的系统响应情况。针对同一土壤比阻B,不同权重系数a的系统阶跃响应曲线如图5所示(限于篇幅,本文仅给出B为50 kN/m2和70 kN/m2的情况)。 图5 各土壤比阻条件下不同权重系数的系统阶跃响应曲线Fig.5 Step response curves of different comprehensive coefficients 针对不同的土壤比阻,系统超调量与权重系数之间的关系如图6a所示;系统稳定时间与权重系数之间的关系如图6b所示,耕深H变化曲线如图6c所示。从仿真结果可以看出,利用模糊PID控制和力位综合调节相结合的方法,系统的超调量基本上都保持在2%以内,系统稳定时间也控制在0.5 s以内,满足实际大功率拖拉机作业对于系统“快速”、“稳定”的要求。根据以上仿真数据,并结合大量的田间作业数据,可以得到权重系数与土壤比阻之间的近似关系如表3所示。 图6 不同土壤比阻条件下各参数随权重系数变化曲线Fig.6 Variation curves of parameters with weight coefficient of different soil specific resistances 土壤比阻/(kN·m-2)20~3030~4040~5050~6060~7070~80≥80权重系数范围0.88~10.82~0.950.65~0.850.40~0.700.25~0.550.10~0.420~0.14 采用牛顿(Newton)插值法对表3数据进行处理,取有限个离散点(x0,f(x0)),(x1,f(x1)),…,(xn,f(xn)),则K阶均差表达式为 (2) 根据均差公式,把x看成有限区间[a,b]上的一点,则有 f(x)=f(x0)+f[x0,x1](x-x0)+ (3) 牛顿(Newton)均插值多项式为 Nn(x)=f(x0)+f[x0,x1](x-x0)+ (4) 由以上方法,可以得出土壤比阻与权重系数之间的规律 a=N7(B) (5) 根据式(5),构建基于土壤比阻的权重系数的自动控制算法,如图7所示,并将该算法写入控制器进行实地测试,以检测该算法在土壤变化较大环境下的控制效果。 图7 控制流程图Fig.7 Control flow charts 通过仿真确定权重系数与土壤比阻的关系,以此编写的算法可以根据土壤环境自动判断与设定权重系数,为了验证其有效性,进行了田间试验。根据已有试验田状况,人为设计了7种土壤环境,每个区域地质较为均匀,经测试,每块区域的土壤比阻分别为22.3、38.4、45.0、54.0、67.2、76.5、86.7 kN/m2(对应图8中区域1~7)。拖拉机从低土壤比阻区域开始作业,结束于高土壤比阻区域。 图8 试验区域示意图Fig.8 Diagram of test area 采用五征雷诺曼1454型大马力轮式拖拉机,EHR23-EM2型电液比例阀作为控制阀。试验中,拖拉机挡位为B2挡,车速控制在7.5 km/h,耕深设定为200 mm,牵引力设定为6 kN。图9为田间试验场景。 图9 田间试验场景Fig.9 Field experiment scene 为了验证本算法是否可以根据土壤情况实现权重系数的自动判断,以及作业质量是否得到一定提升,进行了与固定权重系数值(a=0.5)的田间对比试验。试验从耕深和牵引力变化两个角度对两种控制方法进行比较。田间试验结果如图10所示。 图10 耕深和牵引力对比试验曲线Fig.10 Contrast experiment curves of depth and force 由图10a可知,耕深设定为200 mm,变权重方法在3.8 s时达到设定耕深;a=0.5的综合控制在4.6 s达到设定耕深。在土壤比阻B>67.2 kN/m2的区域,变权重方法相比于a=0.5的综合控制,在耕深误差和波动量上表现欠佳;但在土壤比阻B<67.2 kN/m2的区域,变权重方法耕深误差较小,波动亦较小,该方法的优势较为明显。 由图10b可知,牵引力设定为6 kN,随着土壤比阻的增加,两种调节方式牵引力均随之增大。在土壤比阻B<67.2 kN/m2的区域,变权重方法相比于a=0.5的综合控制,在牵引力波动量上表现欠佳;但在土壤比阻B>67.2 kN/m2的区域,变权重方法相比于a=0.5的综合控制,波动量较小,发动机负荷较为稳定,该方法的优势较为明显。 在B=67.2 kN/m2附近区域,曲线交汇,2种方式下耕深和牵引力的控制综合效果相差不大。 综上所述,作业过程中权重系数可以根据土壤情况自动判断与选择,验证了该算法的实用性。通过对比试验发现,变权重方法在土壤比阻较小时可以保证耕深以发挥位调节优势,在土壤比阻较大时可以保证拖拉机性能以发挥力调节的优势,作业精度也有所提高。 (1)建立了悬挂系统的模糊PID变权重力位综合控制模型,通过调节权重系数分析系统的超调量、稳定时间及耕深的变化情况,结合实际作业经验得出土壤比阻与权重系数之间的关系。 (2)根据土壤比阻与权重系数之间的关系,建立了基于土壤比阻的权重系数的自动控制算法。通过田间试验分析,变权重方法与a=0.5的综合控制相比,可以满足土壤比阻小时保证耕深、土壤比阻大时保证拖拉机牵引功率,实现了权重系数的自动控制与选择。 (3)变权重方法可以根据土壤比阻自动调节权重系数,在土壤比阻变化较大的区域作业效果得到提高,为系统更精确化控制奠定了基础。 1 徐煌. 拖拉机电液悬挂系统力位综合控制技术的研究[D]. 南京:南京农业大学, 2010. XU Huang. Research of force-position combined control technology for tractor electrohydraulic hitch system[D]. Nanjing: Nanjing Agricultural University, 2010.(in Chinese) 2 李明生, 朱忠祥, 毛恩荣,等. 大功率拖拉机电液提升器比例提升阀设计[J/OL]. 农业机械学报, 2012, 43(10):31-35,89.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20121006&flag=1.DOI:10.6041/j.issn.1000-1298.2012.10.006. LI Mingsheng, ZHU Zhongxiang, MAO Enrong, et al. Design of proportional raise valve in electro-hydraulic lifting mechanism of big-power tractor[J/OL].Transactions of the Chinese Society for Agricultural Machinery, 2012, 43(10): 31-35,89.(in Chinese) 3 陈明江. 基于模糊算法的拖拉机电液悬挂系统力调节控制技术研究[D]. 南京:南京农业大学, 2009. CHEN Mingjiang. Research of resistance-adjustment for tractor electrohydraulic hitch system based on the fuzzy algorithm [D]. Nanjing: Nanjing Agricultural University, 2009.(in Chinese) 4 白学峰, 鲁植雄, 常江雪,等. 基于滑转率的拖拉机自动耕深模糊控制仿真[J/OL]. 农业机械学报, 2012, 43(增刊):6-10.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=2012s02&flag=1.DOI:10.6041/j.issn.1000-1298.2012.S0.002. BAI Xuefeng, LU Zhixiong, CHANG Jiangxue, et al. Fuzzy control algorithm simulation of automatic control of tilling depth for tractor based on slip rate[J/OL].Transactions of the Chinese Society for Agricultural Machinery,2012,43(Supp.):6-10.(in Chinese) 5 RODHE L, ETANA A. Performance of slurry injectors compared with band spreading on three swedish soils with ley[J]. Biosystems Engineering, 2005, 92(1):107-118. 6 SAHU R K, RAHEMAN H. Draught prediction of agricultural implements using reference tillage tools in sandy clay loam soil[J]. Biosystems Engineering, 2006, 94(2):275-284. 7 商高高, 谢凌云, 季顺静. 拖拉机悬挂系统耕深自动控制策略的研究[J]. 中国农机化学报, 2016, 37(7):136-140. SHANG Gaogao, XIE Lingyun, JI Shunjing. Research on plowing depth automatic control for tractor hitch system[J]. Journal of Chinese Agricultural Mechanization,2016, 37(7): 136-140.(in Chinese) 8 谢斌, 李皓, 朱忠祥,等. 基于倾角传感器的拖拉机悬挂机组耕深自动测量方法[J]. 农业工程学报, 2013, 29(4):15-21. XIE Bin, LI Hao, ZHU Zhongxiang, et al. Measuring tillage depth for tractor implement automatic using inclinometer[J].Transactions of the CSAE, 2013, 29(4): 15-21.(in Chinese) 9 李明生, 赵建军, 朱忠祥,等. 拖拉机电液悬挂系统模糊PID自适应控制方法[J/OL]. 农业机械学报, 2013, 44(增刊2):295-300.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=2013s255&flag=1.DOI:10.6041/j.issn.1000-1298.2013.S2.055. LI Mingsheng, ZHAO Jianjun, ZHU Zhongxiang, et al. Fuzzy-PID self-adaptive control method in electro-hydraulic hitch system[J/OL]. Transactions of the Chinese Society for Agricultural Machinery, 2013, 44(Supp.2):295-300.(in Chinese) 10 赵建军, 朱忠祥, 宋正河,等. 重型拖拉机电液悬挂比例控制器设计[J/OL]. 农业机械学报, 2014, 45(增刊):10-16.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=2014s101&flag=1.DOI:10.6041/j.issn.1000-1298.2014.S0.001. ZHAO Jianjun, ZHU Zhongxiang, SONG Zhenghe, et al. Proportional controller for electro-hydraulic hitch system in heavy tractor [J/OL]. Transactions of the Chinese Society for Agricultural Machinery, 2014, 45(Supp.): 10-16.(in Chinese) 11 徐煌, 鲁植雄, 宋延东. 拖拉机电液悬挂系统力位综合控制策略研究[J]. 浙江农业学报, 2013, 25(4):879-883. XU Huang, LU Zhixiong, SONG Yandong. Study on force-position regulation of tractor electro-hydraulic hitch system[J] . Acta Agriculturae Zhejiangensis, 2013, 25(4): 879-883.(in Chinese) 12 郭兵. 拖拉机电控液压悬挂系统力位综合控制技术研究[D].南京:南京农业大学,2013. GUO Bing. Research of force-position combined control for tractor electro-hydraulic hitch system [D]. Nanjing: Nanjing Agricultural University, 2013.(in Chinese) 13 商高高, 彭怀江, 夏勇. 拖拉机耕深模糊自动控制方法及其仿真研究[J]. 农业现代化研究, 2014, 35(6):825-829. SHANG Gaogao, PENG Huaijiang, XIA Yong. Sduty om auto-control method and simulation for tractor depth based on fuzzy control [J]. Research of Agricultural Modernization, 2014, 35(6): 825-829.(in Chinese) 14 鲁植雄,郭兵,高强. 拖拉机耕深模糊自动控制方法与试验研究[J]. 农业工程学报, 2013,29(23):23-29. LU Zhixiong, GUO Bing, GAO Qiang, et al. Study on auto-control method and experiment for tractor depth based on fuzzy control[J]. Transactions of the CSAE, 2013,29(23): 23-29. (in Chinese) 15 李丽娜, 柳洪义, 罗忠,等. 模糊PID复合控制算法改进及应用[J]. 东北大学学报:自然科学版, 2009, 30(2):274-278. LI Li’na,LIU Hongyi,LUO Zhong,et al. Study on improved Fuzzy-PID composite control arithmetics and its applications[J].Journal of Northeastern University: Natural Science , 2009, 30(2):274-278.(in Chinese) 16 Rexroth Bosch Group. Knowledge explanation: hydraulic for tractor[M]. Ditzingen, Germany: Bosch Robert AG, 2014. 17 谢凌云. 大功率拖拉机电液悬挂系统耕深自动控制研究[D]. 镇江:江苏大学, 2016. XIE Lingyun.Research on plowing depth automatic control for high-power tractor electro-hydraulic hitch system[D]. Zhenjiang: Jiangsu University,2016.(in Chinese) 18 葛宝明, 林飞, 李国国. 先进控制理论及其应用 [M]. 北京: 机械工业出版社, 2007. 19 王述彦, 师宇, 冯忠绪. 基于模糊PID控制器的控制方法研究[J]. 机械科学与技术, 2011, 30(1):166-172. WANG Shuyan,SHI Yu,FENG Zhongxu. A method for controlling a loading system based on a Fuzzy-PID controller[J].Mechanical Science and Technology for Aerospace Engineering, 2011, 30(1):166-172.(in Chinese) 20 谢斌. 拖拉机农具仿真作业机组悬挂系统电液控制技术的研究[D]. 北京:中国农业大学, 2000. XIE Bin. Study on electro-hydraulic control technology of hitch system for the tractor-implement combination[D]. Beijing: China Agricultural University, 2000.(in Chinese) 21 谭彧. 拖拉机液压悬挂和加载系统性能研究[D]. 北京:中国农业大学, 2004. TAN Yu. The study of characteristics for hydraulic hitch & loading system in tractor [D]. Beijing: China Agricultural University, 2004.(in Chinese) 22 SAEYS W, ENGELEN K, RAMON H, et al. An automatic depth control system for shallow manure injection, Part 1: modelling of the depth control system[J]. Biosystems Engineering, 2007, 98(2):146-154. 23 刘义, 高翔, 王寅晓,等. 拖拉机电-液悬挂系统耕深自动控制的研究[J]. 机床与液压, 2012, 40(1):51-53. LIU Yi, GAO Xiang, WANG Yinxiao, et al. Research on plowing depth automatic control for tractor electric-hydraulic hitch system [J]. Machine Tool & Hydraulics, 2012, 40(1): 51-53.(in Chinese)3.3 仿真结果分析

3.4 数据分析与程序设计

f[x0,x1,x2](x-x0)(x-x1)+…+
f[x0,x1,…,xn](x-x0)…(x-xn)+
f[x,x0,…,xn]ωn+1(x)=Nn(x)+Rn(x)
f[x0,x1,x2](x-x0)(x-x1)+…+
f[x0,x1,…,xn](x-x0)…(x-xn)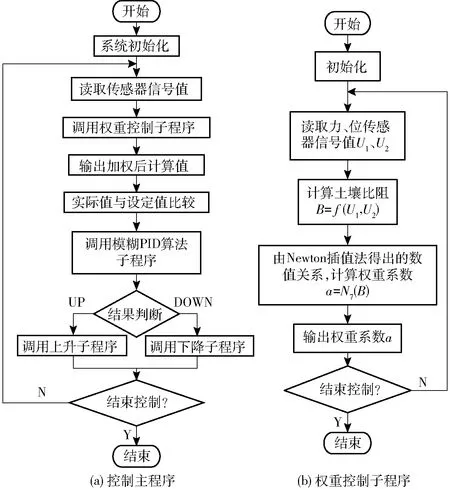
4 试验验证
4.1 试验条件与方案

4.2 试验结果与分析

5 结论