基于无人机影像匹配点云的苗圃单木冠层三维分割
2018-03-13陈崇成黄洪宇
陈崇成 李 旭 黄洪宇
(1.福州大学地理空间信息技术国家地方联合工程研究中心, 福州 350116;2.福州大学空间数据挖掘与信息共享省部共建教育部重点实验室, 福州 350116)
0 引言
从森林蓄积量、生物量的估算到物种识别、林木生长模型的构建,单木树冠的提取(Individual tree crown detection and delineation, ITCD)一直是森林资源调查与管理中最为关键的步骤之一[1-2]。
光学影像与激光雷达点云是ITCD研究的两类主流数据来源。在林业遥感中,光学影像主要反映树冠的二维信息,而激光雷达可以穿透森林冠层,从而直接获得地面和森林冠层间垂直的三维结构信息,因此具有无可比拟的优势。基于激光点云的ITCD策略通常将三维点云转化为栅格化的冠层高度模型(Canopy height model, CHM),单木树冠的提取过程随即转换为二维影像的分割问题[2]。一些主流的树冠提取方法如爬峰法[3]、射线法[4]、模版匹配法[5]、区域生长算法[6]、标记分水岭分割算法[7]等分割方案得以应用。从树木的激光点云数据出发,王祺等[8]运用扇形面积逼近和不规则体切片分割累加算法,实现树冠体积的自动计算。杨全月等[9]基于计算几何学的寻找凸包算法,实现了自动提取树冠的表面积、投影面积以及体积等测树因子。卜帆等[10]在机载LiDAR数据和高空间分辨率航空影像两类数据的支持下,以城市为实验区,利用标记分水岭分割算法实现了单木树冠提取。然而,虽然激光雷达在采样精度和工作速度方面有了很大提升,但是这些数据采集和处理的成本高昂。
随着计算机视觉算法的不断发展,由影像匹配方式获取的点云精度和密度越来越高,采用影像匹配的方式获取点云数据显得更为经济实用。影像匹配点云在空间中的分布形态表现为一系列离散的、不均匀分布的三维点集,含有丰富的纹理和语义信息[11]。类似于激光雷达,通过影像匹配点云可以获得数字地表模型(Digital surface model, DSM)和数字高程模型(Digital elevation model, DEM),但是由于影像属于被动式遥感产物,不像激光雷达具有一定的植被穿透性,因此在植被密集覆盖的情况下从影像点云中获取完整准确的DEM还是有困难的。目前,国外基于影像匹配点云的研究大多是单木定位识别或树种分类等应用,旨在单木树冠的勾绘与参数提取的研究较少,国内亦是如此[12-14]。
本文从影像匹配点云出发,基于改进的种子区域生长算法,对单木进行定位识别与冠层轮廓的三维分割;对比手绘参考树冠,从2个尺度(由林分到单木)的2个层面(由多边形精度到点精度)评价单木的提取结果;同时,尝试提取单木的坐标、冠幅和树高等参数,选取冠幅的提取结果进行定量评价。
1 研究区概况
选取福建省三明市某林场内的罗汉松和桂花树苗圃中的2块25 m×25 m大小的区域作为测试样本:样地样本1为中低度郁闭的桂花树林,阔叶林;目测胸径为0.02 m以上,树高范围2.05~4.16 m,冠幅0.9~3.3 m;树冠呈近半球型,长势良好;部分区域树冠之间存在粘连现象。样地样本2为中低度郁闭的罗汉松苗圃,针叶林;树冠呈锥形,树高范围1.5~3.56 m,冠幅0.4~1.8 m;冠型小且结构复杂。
原始影像采集于2017年3月2日,利用大疆精灵3A多旋翼无人机在苗圃地上空60 m处进行航摄,飞行耗时10 min,获得了分辨率为1 200万像素、航向重叠达90%的RGB影像135张。使用计算机视觉和摄影测量软件Pix4DMapper 2.1,对这些影像进行特征点提取、特征点匹配、空中三角解算、影像校正、拼接,生成一幅研究区域的高分正射影像和由稀疏点云加密生成的密集点云(图1)。其中,高分影像的空间分辨率为0.025 4 m,覆盖范围为0.366 km2,密集点云总数为9 638 195,平均点密度为233.49点/m3。图1a是由Pix4DMapper生成的密集点云的倾斜透视图,点云上方的蓝色圆点和矩形代表了无人机在飞行区域上空飞行时所拍摄的图像位置;图1b为研究区正射影像图和测试样本1、样本2所在的位置(红色矩形)。
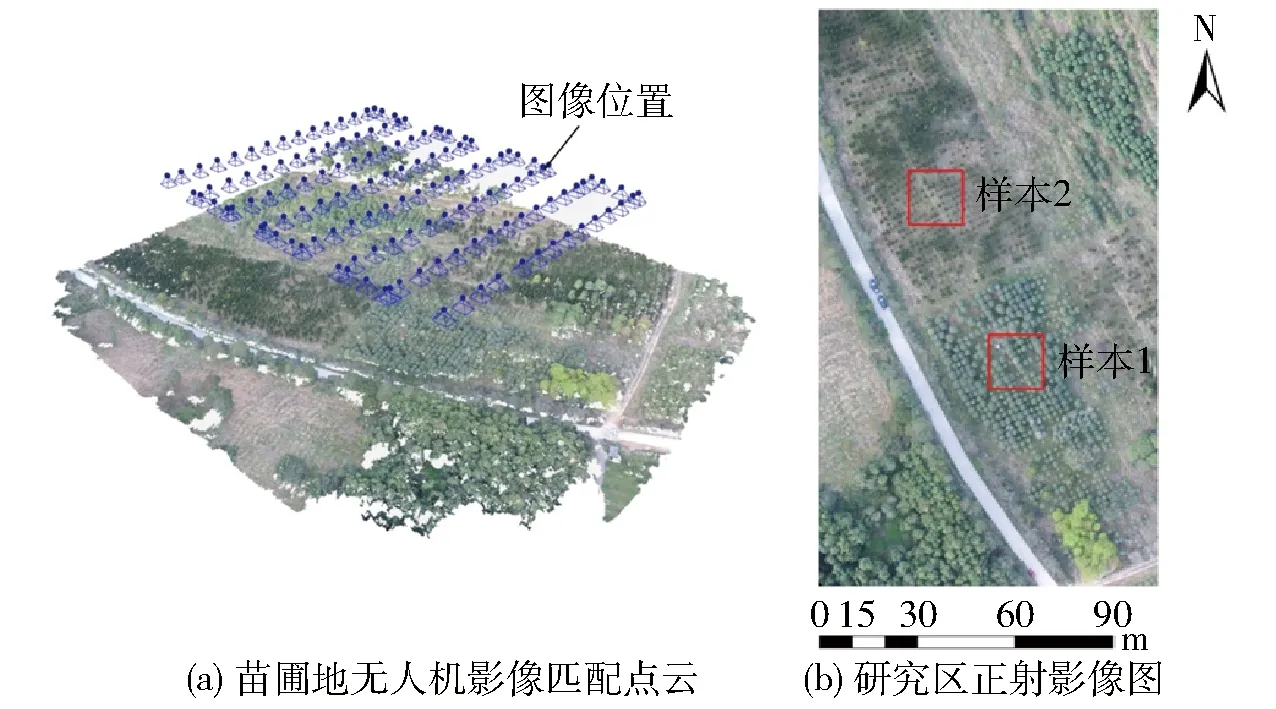
图1 数据采集与测试样本Fig.1 Data acquisition and measuring sample
2 研究方法
研究方法如图2所示,分3部分:第1部分是预处理,第2部分是单木提取,第3部分是实验结果与精度验证。
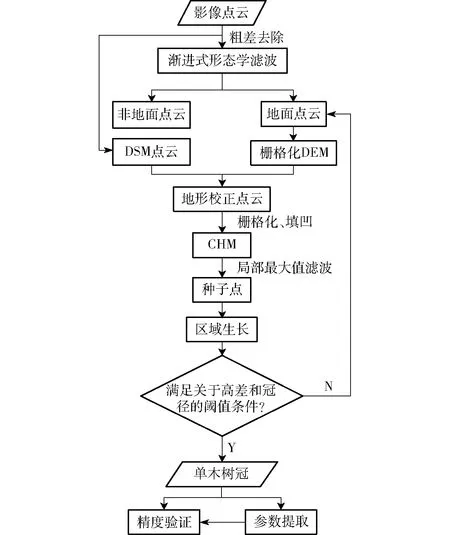
图2 研究方法流程图Fig.2 Flow chart of research method
预处理的主要目的是为了生成具有足够精度的冠层高度模型;本研究采用归一化点云栅格化的生成方式,这个过程中最关键的是要准确地拟合待研究区域的地形;单木提取应用改进的种子区域生长算法[15]实现,其主要内容包括种子区域选取、生长规则的设定等;得到单木的二维树冠轮廓(凸包)后,以包内影像点云“重构”单木树冠达到三维分割的目的;由于缺乏单木树冠的地面实测数据,在精度验证时,对树冠提取精度的评价选取了ArcGIS中手绘的树冠轮廓作为参考,单木参数提取及其验证过程可以看作是对树冠提取结果的间接验证,也是基于手绘的树冠轮廓进行的。
2.1 预处理
CHM是一个表达树冠上表面距离地面高度和树冠水平分布的模型,它使得植被的冠高不再受地形的影响,是各项森林结构参数或森林生物量反演的关键[16-19]。林业资源调查中的很多重要参数都可以从CHM中直接或间接地获得,如树高、冠幅、胸径和郁闭度等。CHM有2种生成方式:第1种是通过数字表面模型(DSM)与地面高程模型(DEM)相减得到。第2种方法是将DSM点云数据中每个点的Z值(高程)扣除其对应的地形贡献,得到归一化点云,再由归一化点云经过栅格化方式得到。本文选用第2种生成方式。需要注意的是,实验得到的栅格化的CHM上存在少量“凹坑”,这使得CHM不能真实反映和描述森林冠层表面的形态结构,对后续树冠、树高、生物量等森林参数反演造成影响。因此,本文还加上了对CHM去除凹坑的操作。预处理步骤如下:① 在CloudCompare软件[20]中以随机采样的方式,对原始点云样本进行抽稀;采用维也纳技术大学摄影测量研究组开发的OPALS软件实现[21-22]粗差的去除。② 利用渐进式形态学滤波算法[23],通过控制滤波窗口的尺寸逐步剔除非地面点,提取地形采样点。③ 然后,采用泛克里金插值法[24]填补点云 “空洞”,并生成栅格DEM。④ 将点云Z值坐标与DEM对应位置的高程值相减得到归一化点云或称地形校正点云,再由归一化点云插值后栅格化的方式得到CHM。⑤ 平滑噪声,并对CHM上的少量凹坑进行“填凹”处理,采用一种先对CHM进行局部最大值滤波,再进行均值滤波的复合滤波方式去除“凹坑”。
2.2 基于种子区域生长算法的单木树冠提取
种子区域生长的过程改进自文献[25-26]的实现方案,该算法首先作用在CHM栅格上,得到二维树冠凸包多边形,再沿着二维凸包用归一化影像匹配点云对单木树冠进行重构,进而达到单木树冠点云三维分割的目的。
算法基于R/RStudio实现。R是一个免费、源代码开放的、用于统计计算和制图的工具软件。RStudio是R语言的一种集成开发环境,基于C++开发,它的图形用户界面基于Qt。具体步骤如下:①种子点的选取:种子点是生长发生的初始区域,一般通过定义一个滑动的最大值搜索窗口,选取CHM中高于预设的最低树高阈值的点作为种子点。②初始区域标记:标记CHM上点的类别,将其分为种子点和非种子点两类。③区域生长准则:从初始区域出发,搜索一个种子点的4个邻接点;判断各邻接点到对应种子点的水平距离是否小于预设的最大冠径;判断各邻接点的高程是否大于预设的高差值。若邻接点同时满足以上条件,则被标记为新的种子点(树冠点);对所有非种子点重复以上过程,直到所有非种子点被归类完毕。④标记后的CHM中,以每一个初始种子点为中心,单木树冠(即按照树顶点的判别标准,由初始种子点生长形成的区域)内的中心点坐标可以确定,依此建立一个二维的凸包记录它的边界。⑤生成的边界多边形,即为最后的树冠轮廓;沿此轮廓以树冠影像点云重构单木形态,即可获得三维的分割效果。
2.3 结果与验证
对实验结果的精度加以验证,精度验证是ITCD研究的重要组成部分,主要包括两方面:①林分点精度验证标准和单木点精度验证标准。②树冠轮廓勾绘精度,即多边形精度。
2.3.1单木识别
林分尺度的单木识别精度评价指标,可利用检出率D表示,即正检单木数Nd与参考单木数Nr的比值
编者按:当前和今后一个时期,既是水利改革发展抢抓机遇的黄金期,也是负重前行的攻坚期。能否实现跨越发展,顶层设计至关重要。2012年2月9—10日,水利部在沈阳召开全国水利规划计划工作会议,谋篇布局,开启水利长远发展之路成为会议焦点,强调“水利改革发展顶层设计”成为会议主旋律。本刊特别刊出陈雷部长在会议上的重要讲话和矫勇副部长的总结讲话,以利于广大水利工作者深入学习领会其精髓,并付诸实践,为推进水利跨越发展作出更大贡献。
(1)
单木尺度的单木识别精度,即验证已检出单木的定位精度。HIRSCHMUGL等[6]提出以实测单木位置为中心建立1 m的缓冲区,统计包括缓冲区范围内的单木数量N1∶1,并通过基于N1∶1的生产者精度P和用户精度U来验证单木的定位精度。
(2)
(3)
式中Nall——正检、过检和错检出的树冠顶点数之和
图3展示了2个样地单木位置的识别,即树顶点的探测结果。
红色圆点表示本文的单木识别算法检测出的树冠顶点位置,黄色圆点表示通过目视解译获取的参考树冠顶点位置。观察红点与树冠的相对位置可将检测结果分成4类(图4)。
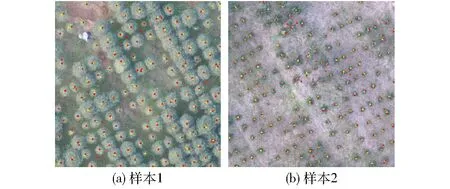
图3 树顶点探测结果Fig.3 Tree top dectection results
当同一树冠内红点和黄点的个数比为1时,被视为正检;同样,当个数比大于1时被视为过检;当个数比为无穷大时,被视为错检;当个数比为0时,被视为漏检。
依此规则,统计分析结果如表1所示。
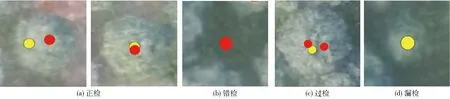
图4 单木树顶点检测结果分类Fig.4 Classification of individual tree top dectection results

样地参考数正检数过检数漏检数错检数检出率/%生产者精度/%用户精度/%样本1128111244676.0386.7278.72样本21411282011279.5090.7880.00
2.3.2树冠勾绘
林分尺度的单木树冠轮廓多边形精度,通常采用树冠面积的相对误差E进行验证[25]。E主要考虑了正检树冠总面积SD与参考树冠总面积SR之间的差异,其计算公式为
(4)
其中,若E为正值,则表明本文的ITCD算法存在对树冠面积的高估现象,反之相反。
2个林窗的树冠轮廓勾绘结果见图5。
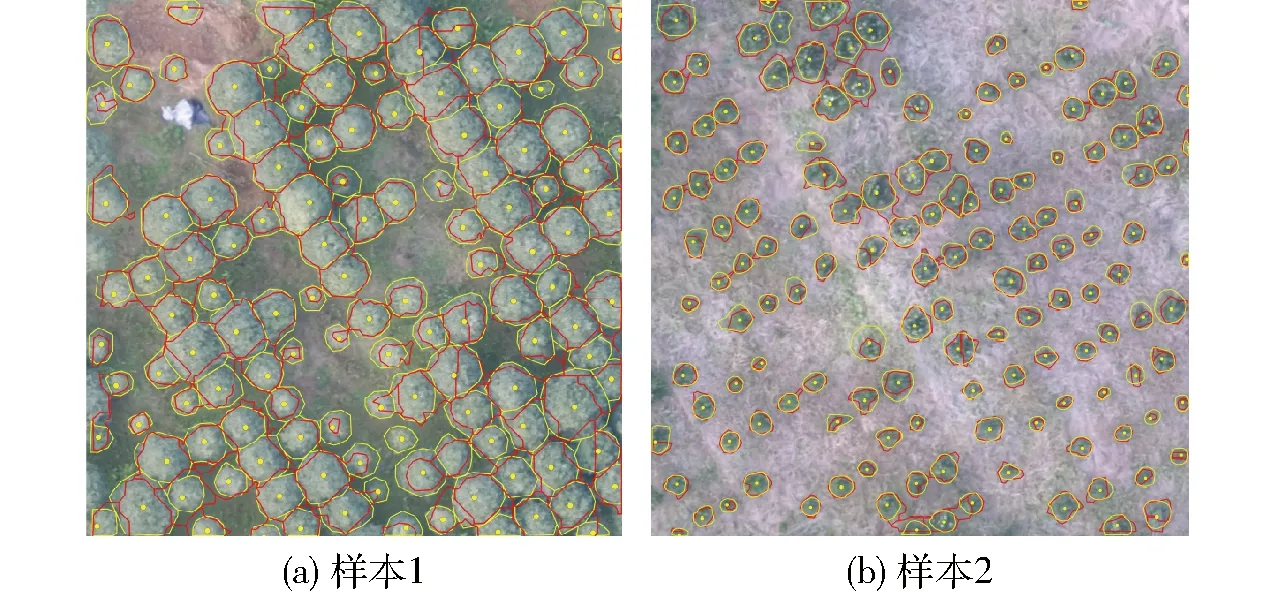
图5 树冠勾绘结果Fig.5 Tree crown delineation results
F测度的计算需要对树冠勾绘的结果进行分类,以手绘的结果为参考,图5中树冠分割结果可以被分为匹配、接近匹配、过分割、错分割、合并和丢失6类,直观解释如图6所示。
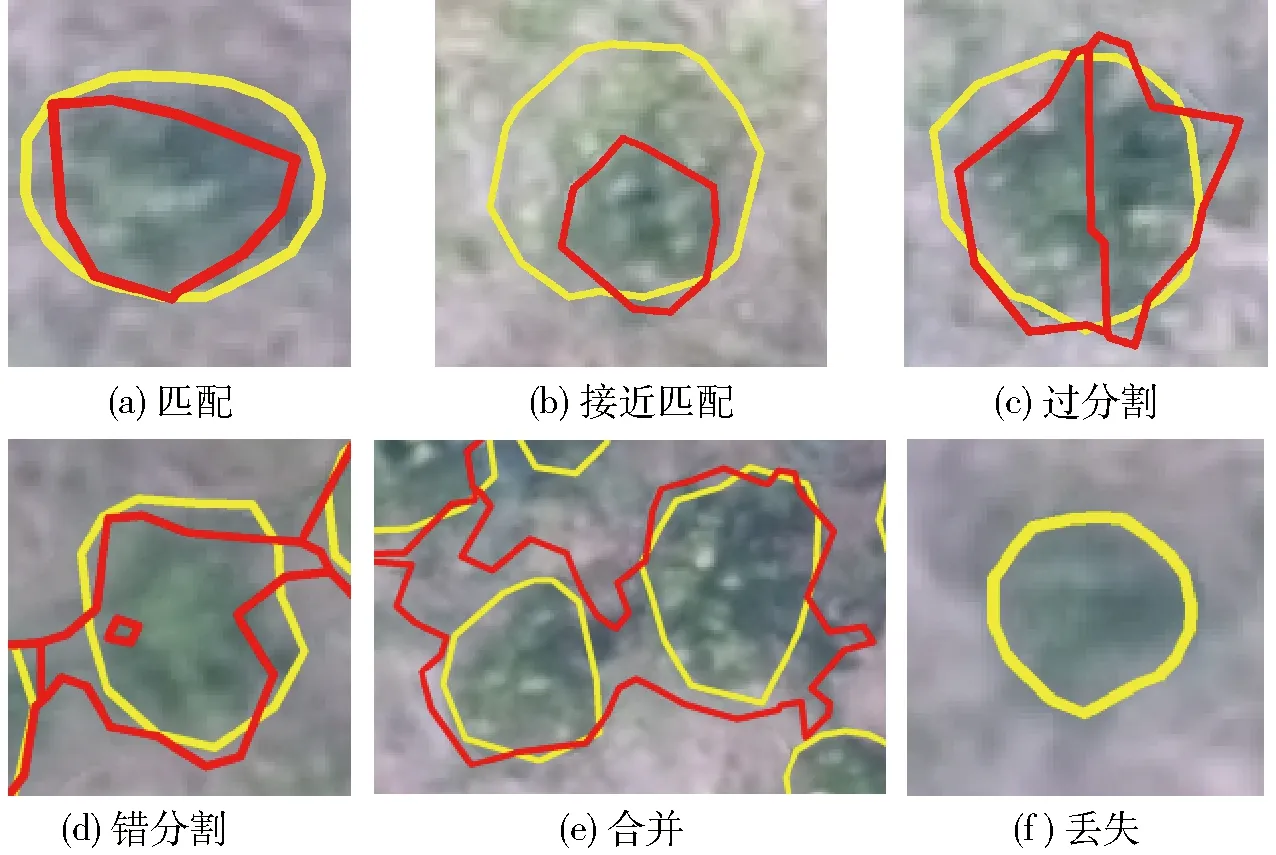
图6 单木树冠勾绘结果分类Fig.6 Classification of individual tree crown delineation results
设黄色轮廓为参考树冠,红色轮廓为算法自动勾绘轮廓,计算两色树冠轮廓的面积比;若该比值接近于1,则分割结果被视为匹配;若该比值介于0.5到1之间,则被视为接近匹配;若一个黄色轮廓被多个红色轮廓占据则被视为过分割;错分割在2个样地中,多表现为红色轮廓内的凹坑;合并指一个红色轮廓被多个黄色轮廓占据;丢失指黄色轮廓范围内无红色轮廓出现。黄色轮廓(参考树冠)总数记为NR;红色轮廓(算法检出的树冠总数)的总数记为ND;只有匹配和接近匹配被认为是正确的树冠提取结果(算法检出的正检树冠数),记为NC。
树冠提取的精确率AD为
(5)
树冠提取的召回率AR为
(6)
则F测度计算公式为
(7)
表2给出了2个测试样地的精度验证结果。
2.3.3三维分割
基于栅格化的CHM对单木树冠的二维轮廓进行提取后,以CHM上每个单木多边形凸包为参考,拾取CHM归一化影像匹配点云中属于CHM上凸包内的点,并随机赋予不同颜色;这样以CHM点云“重构”CHM栅格上的单木二维树冠,达到单木三维分割效果。图7展示了2个样地的原始点云(抽稀后)、地形校正点云以及最终的单木三维分割结果,其中图7c中不同颜色代表不同的树。

表2 树冠勾绘结果精度验证Tab.2 Accuracy assessment of tree crown delineation results
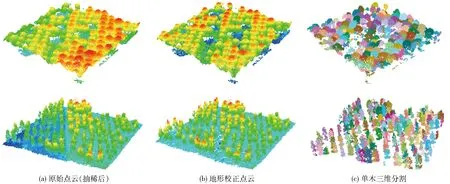
图7 单木树冠点云三维分割结果Fig.7 3D segmentation results of individual tree crowns
2.3.4单木结构参数提取
基于2.3.2节的方法,树顶探测结果可以用于计算单木的地理位置和树高,而树冠轮廓的勾绘结果可以用于估测单木冠面积、冠周长和冠幅等参数。表3给出了2个样地的部分单木参数提取结果,主要包括树高、冠面积、冠幅和冠周长。
基于表3的结果,采用手绘树冠轮廓的冠幅为参考值,2个样地的树冠冠幅提取结果为从100个样本1中选60个、120个样本2中选80个。借助SPSS软件建立实验值与参考值的回归方程,评价冠幅提取精度。从图8可以看出,2个样地的冠幅提取值与参考值的决定系数为0.85及0.87,均方根误差分别为0.14 m和0.06 m。
3 讨论
本文选取的阔叶林和针叶林样本地形都较为平坦,且森林郁闭度较小,主要是基于影像点云难以表达冠下地形的考虑。从原始点云开始经过去粗差、
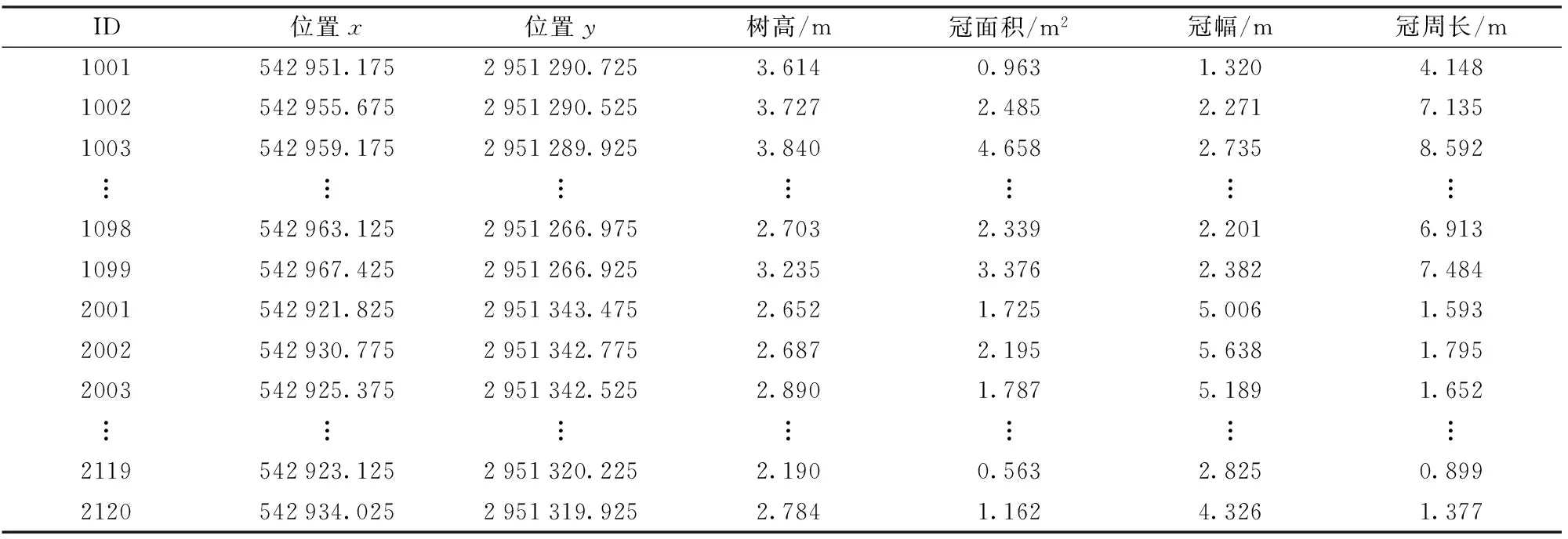
表3 单木树冠参数提取结果Tab.3 Extraction results of individual tree crown parameters
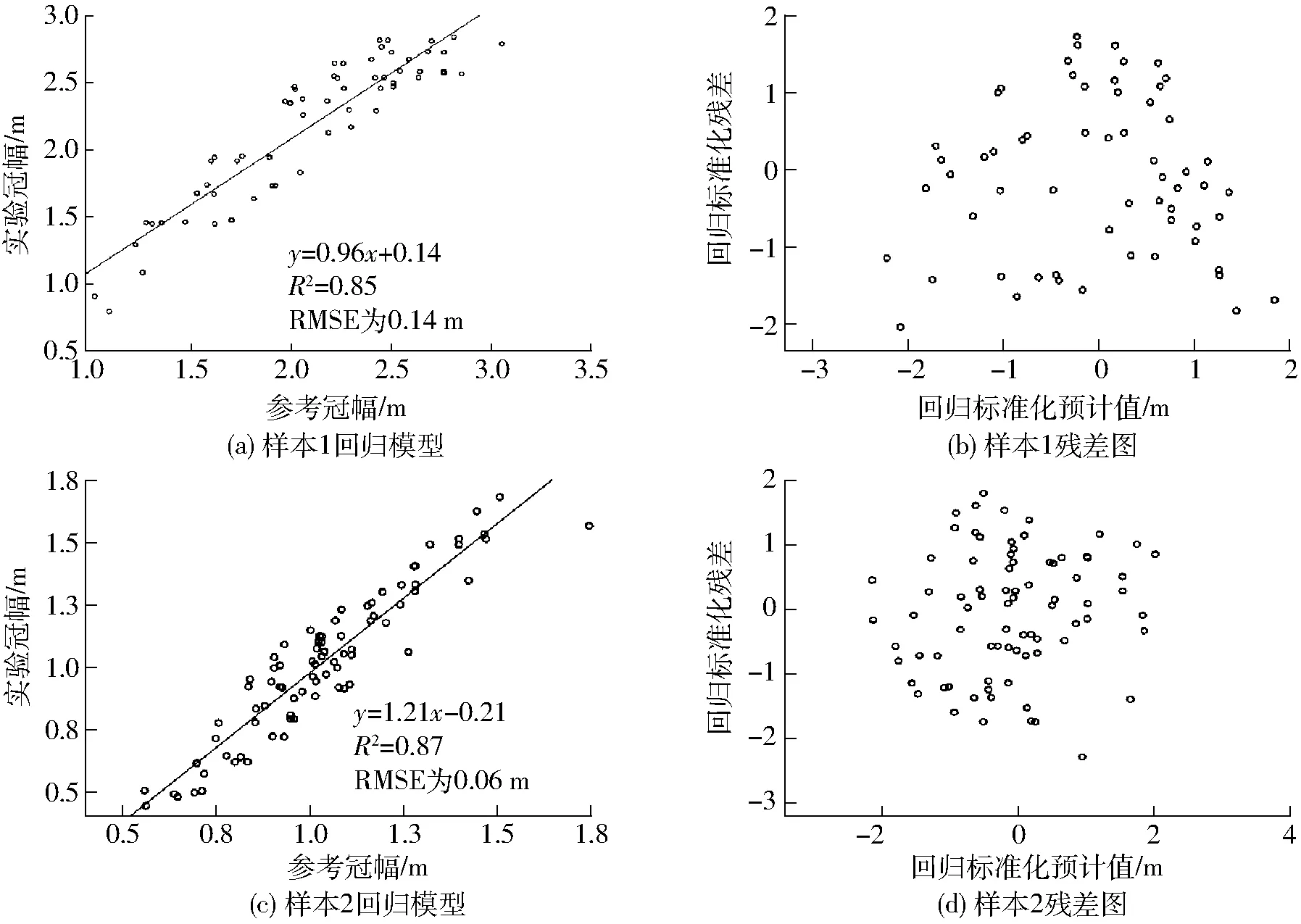
图8 单木树冠冠幅提取结果精度评定Fig.8 Accuracy evaluation of individual tree crown diameter extraction results
地形采样点提取、DEM拟合、到最后归一化点云栅格化过程中,点云或者影像产物的分辨率始终保持一致。对算法树冠提取精度的验证从林窗尺度逐渐细化到单木尺度,并给出了单木提取的点精度与多边形精度;特别地,在树冠勾绘的多边形精度评价中,树冠提取面积相对误差为负值,说明本文方法存在低估的问题,但其数值控制在8.59%以内;参数提取时,由于实测数据难以准确地获取,本文采用手绘树冠冠幅为参考,基于实验值与参考值的回归方程,实现对单木冠幅的提取结果评价;类似地,张树森等[27]对大兴安岭地区天然兴安落叶松疏开木冠幅预测模型中,冠幅估测精度RMSE为0.403 4 m。李赟等[28]基于UAV高分影像对杨树冠幅提取及相关性研究中,估测冠幅RMSE为0.444 m。本文树冠估测结果的均方根误差则达到了0.14 m以内,精度较高。此外相比于阔叶树冠,针叶树冠的冠幅提取结果更加准确,可达到0.06 m。
基于无人机获取影像的遥感方式具有机动灵活、快速出图和高时空分辨率等方面的优势,但其主要不足之处在于影像只能反映表面信息,不能得到密闭树冠下的地形状况;这种情况下若得到的冠层高度模型CHM不准确,其对提取结果的精度和准确性将会产生不利影响。 如果有合适的地形数据(例如来自于早期机载或地面激光雷达扫描获得的DEM,或实测得到的地形图)作为补充,结合无人机影像匹配点云使用,本文提出的方法可以适用于更广泛的场景。
4 结束语
以某林场内的苗圃地作为研究对象,基于无人机影像点云提取了2个样地、2种类型的单木树冠(针叶纯林和阔叶纯林)。从实验样地的2个尺度的2个层面的精度验证结果看,树冠勾绘算法虽然存在低估现象,但相对误差控制在8.59%以内;依此方案,林窗范围内的树冠提取F测度达到了89%以上,对单木冠幅的提取精度达到了0.14 m以内。研究表明,该方案精度可靠、简单有效,适用于小范围、高精度的植被制图。
1 JING L, HU B, NOLAND T, et al. An individual tree crown delineation method based on multi-scale segmentation of imagery [J]. ISPRS Journal of Photogrammetry & Remote Sensing, 2012, 70(3):88-98.
2 ZHEN Z, QUACKENBUSH L, ZHANG L. Trends in automatic individual tree crown detection and delineation—evolution of LiDAR data [J]. Remote Sensing, 2016, 8(4):333.
3 张凝, 张晓丽, 叶栗. 基于改进爬峰法高分辨率遥感影像分割的树冠提取[J/OL]. 农业机械学报, 2014,45(12):294-300.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=20141242&journal_id=jcsam.DOI:10.6041/j.issn.1000-1298.2014.12.042.
ZHANG Ning, ZHANG Xiaoli, YE Li. Tree crown extraction based on segmentation of high-resolution remote sensing image improved peak-climbing algorithm [J/OL]. Transactions of the Chinese Society for Agricultural Machinery, 2014, 45(12): 294-300. (in Chinese)
4 POULIOT D A, KING D J, BELL F W, et al. Automated tree crown detection and delineation in high-resolution digital camera imagery of coniferous forest regeneration [J]. Remote Sensing of Environment, 2002, 82(2-3): 322-334.
5 POLLOCK R J. The automatic recognition of individual trees in aerial images of forests based on a synthetic tree crown image model [D]. Vancouver: The University of British Colombia, 1996.
6 HIRSCHMUGL M, OFNER M, RAGGAM J, et al. Single tree detection in very high resolution remote sensing data [J]. Remote Sensing of Environment, 2007, 110(4): 533-544.
7 GAETANO R, MASI G, POGGI G, et al. Marker-controlled watershed-based segmentation of multiresolution remote sensing images [J]. IEEE Transactions on Geoscience & Remote Sensing, 2015, 53(6):2987-3004.
8 王祺,胡洪,吴艳兰,等. 基于点云数据的树冠体积自动求算方法[J]. 西北林学院学报,2017,32(2):242-246.
WANG Qi, HU Hong, WU Yanlan, et al. Automatic tree volume calculation method based on point cloud data [J]. Journal of Northwest Forestry University,2017, 32(2):242-246. (in Chinese)
9 杨全月,陈志泊,孙国栋. 基于点云数据的测树因子自动提取方法[J/OL]. 农业机械学报,2017,48(8):179-185.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=20170820&journal_id=jcsam.DOI:10.6041/j.issn.1000-1298.2017.08.020.
YANG Quanyue, CHEN Zhibo, SUN Guodong.Automatic extraction method of tree measurement factors based on point cloud data [J/OL]. Transactions of the Chinese Society for Agricultural Machinery, 2017, 48(8):179-185. (in Chinese)
10 卜帆,石玉立. 机载LiDAR高差和高分影像的城市树冠提取比较[J]. 遥感技术与应用,2017, 32(5):875-882.
BU Fan, SHI Yuli. The comparison of urban tree crown extraction based on airborne LiDAR elevation difference and high resolution imagery [J]. Remote Sensing Technology and Application,2017, 32(5):875-882. (in Chinese)
11 冯帅. 影像匹配点云与机载激光点云的比较[J]. 地理空间信息, 2014, 32(6):82-83.
FENG Shuai.Comparison of image matching point clouds with LiDAR point clouds [J]. Geospatial Information, 2014, 32(6):82-83. (in Chinese)
12 SPERLICH M, KATTENBORN T, KOCH B, et al. Potential of unmanned aerial vehicle based photogrammetric point clouds for automatic single tree detection [C]∥Gemeinsame Tagung 2014 der DGfK, der DGPF, der GfGI und des GiN, 2014.
13 KATTENBORN T, SPERLICH M, BATAUA K, et al. Automatic single tree detection in plantations using UAV-based photogrammetric point clouds [C]∥ ISPRS Technical Commission III Symposium, 2014:139-144.
14 杨坤,赵艳玲,张建勇,等. 利用无人机高分辨率影像进行树木高度提取[J]. 北京林业大学学报,2017,39(8):17-23.
YANG Kun, ZHAO Yanling, ZHANG Jianyong, et al. Tree height extraction using high-resolution imagery acquired from an unmanned aerial vehicle (UAV) [J]. Journal of Beijing Forestry University, 2017, 39(8): 17-23. (in Chinese)
15 DALPONTE M, COOMES D A. Tree-centric mapping of forest carbon density from airborne laser scanning and hyperspectral data [J]. Methods in Ecology & Evolution, 2016, 7(10):1236-1245.
16 KOUKOULAS S, BLACKBURN G A. Quantifying the spatial properties of forest canopy gaps using LiDAR imagery and GIS [J]. International Journal of Remote Sensing, 2004, 25(15): 3049-3071.
17 BRANDTBERG T. Classifying individual tree species under leaf-off and leaf-on conditions using airborne LiDAR [J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2007, 61(5): 325-340.
18 POPESCU S C. Estimating plot-level forest biophysical parameters using small-footprint airborne LiDAR measurements [D]. Virginia: Virginia Tech., 2002.
19 POPESCU S C. Estimating biomass of individual pine trees using airborne LiDAR [J]. Biomass and Bioenergy, 2007, 31(9): 646-655.
20 CloudCompare (version 2.6) [EB/OL][2017-10-30] http:∥www.cloudcompare.org/.
21 MANDLBURGER G, PFENNIGBAUER M, PFEIFER N. Analyzing near water surface penetration in laser bathymetry—a case study at the River Pielach [C]∥ISPRS Ann. Photogramm, 2013, II-5/W2:175-180.
22 MANDLBURGER G, HAUER C, WIESER M, et al. Topo-bathymetric LiDAR for monitoring river morphodynamics and instream habitats—a case study at the Pielach River [J]. Remote Sensing, 2015, 7(5):6160-6195.
23 ZHANG K, CHEN S C, WHITMAN D, et al. A progressive morphological filter for removing nonground measurements from airborne LIDAR data [J]. IEEE Transactions on Geoscience & Remote Sensing, 2003, 41(4):872-882.
24 PEBESMA E J. Multivariable geostatistics in S: the gstat package [J]. Computers & Geosciences, 2004, 30(7):683-691.
26 ZHEN Z, QUACKENBUSH L J, STEHMAN S V, et al. Agent-based region growing for individual tree crown delineation from airborne laser scanning ALS data [J]. International Journal of Remote Sensing, 2015, 36(7):1965-1993.
27 张树森,贾炜玮,王玉霞,等. 大兴安岭地区天然兴安落叶松疏开木冠幅预测模型[J]. 森林工程, 2017, 33(3): 33-38.
ZHANG Shusen,JIA Weiwei, WANG Yuxia, et al. Modeling crown width for the opening-grown trees of naturalLarixgmeliniplantation in Daxing’an Mountains [J]. Forest Engineering, 2017,33(3): 33-38. (in Chinese)
28 李赟,温小荣,佘光辉,等. 基于UAV高分影像的杨树冠幅提取及相关性研究[J]. 林业科学研究,2017,30(4):653-658.
LI Yun, WEN Xiaorong, SHE Guanghui, et al. Study on poplar crown extraction and correlation based on UAV high resolution image [J]. Forest Research, 2017, 30(4): 653-658. (in Chinese)