保护性耕作拟合曲线型深松铲设计与试验
2018-03-13赵淑红王加一陈君执杨悦乾谭贺文
赵淑红 王加一 陈君执 杨悦乾 谭贺文
(东北农业大学工程学院, 哈尔滨 150030)
0 引言
为了打破坚硬的土壤犁底层,同时降低耕作阻力和表层土壤扰动量,选择在免耕播种地区进行深松。目前深松铲类型多为折线式、圆弧式,折线式深松铲更多用于深松灭茬机上,耕作阻力较大,对拖拉机的动力要求较高,不适合机械大范围作业;圆弧式深松铲多用于深松机上,其土壤表层扰动量较大,土壤水肥损失严重,不能满足保护性耕作的要求[1-2]。
近些年来,学者对深松铲的研究取得了大量成果[3-9],其主要从振动和仿生原理两方面对深松铲进行设计与研究。
随着软件的发展,仿真分析以减少样机的加工及试验时间的优点,逐渐成为模拟试验的一种方法。离散元法可用来模拟颗粒材料和研究材料间的微观及宏观变化。近几年学者通过离散元软件仿真模拟触土部件工作状态,并与试验进行对比,验证了离散元软件模拟土壤与试验误差较小[10-11],因此离散元软件可用于模拟触土部件与土壤模型。在触土部件与土壤研究中,触土部件作用于土壤后,土壤往往在运动行为上反作用于触土部件。对于深松铲的研究,铲柄使土壤沿铲柄侧向远离铲柄,土壤在运动行为上对于铲柄的影响较小,而铲尖作用于土壤后,土壤在运动行为上沿铲柄运动方向较明显,对铲柄的影响较大,且土壤轨迹沿铲柄运动可以增加滑移,减少摩擦[12-15]。因此本文依据铲尖对土壤的作用设计铲柄,建立铲尖与土壤的仿真模型,获得铲尖上方土壤颗粒运动轨迹的拟合曲线,设计拟合曲线型弧状深松铲,运用离散元法对铲柄、铲尖的互作效应进行仿真试验,确定设计的合理性,并进行土槽对比试验与田间对比试验,验证设计的优良性。
1 离散元仿真分析
深松铲的主要作用原理是深松铲铲尖在前端的深入开土以及后端深松铲铲柄的破土。为设计铲柄形状,选取铲尖对土壤的影响进行分析。考虑到实际中铲尖不可能单独运动,设置连接段为任何位置,都会对试验结果造成影响,因此选取离散元仿真软件对其分析。
1.1 仿真模型与铲尖模型的建立
本试验选取常用的箭形深松铲铲尖进行试验,为保证铲尖作业范围,设置长1 000 mm、宽400 mm、高500 mm的土壤仿真模型。
依据文献[16]规定的深松铲铲尖基本尺寸,建立铲尖模型,如图1。保存为igs格式导入EDEM软件中。材料为Q235钢,密度为7 850 kg/m3,剪切模量为7.7×1010Pa,泊松比为0.3。
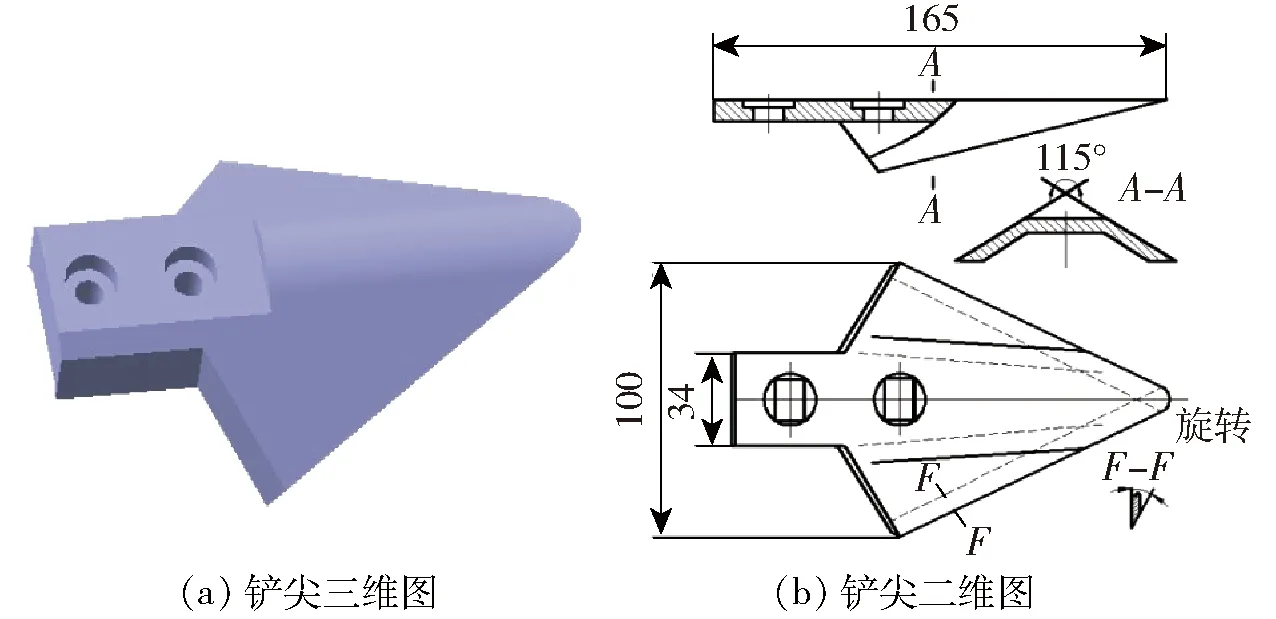
图1 深松铲铲尖结构图Fig.1 Structure diagrams of subsoiler tip
1.2 土壤模型的建立
1.2.1土壤接触模型

根据牛顿第二定律,每个颗粒的运动方程为
(1)
(2)
式中vi——颗粒i的移动速度
Ii——颗粒i的转动惯量
ni——颗粒个数
ωi——颗粒i的角速度
F——颗粒i的粘聚力
试验地区为东北壤土,具有粒度均匀、透气性好、透水性好、强烈胀缩和扰动特性的特点,土壤有一定粘附力和弹塑性[19]。因此土壤颗粒与深松铲铲尖之间设定为Hertz-Mindlin(no slip)接触模型,土壤颗粒与土壤颗粒之间除设置Hertz-Mindlin(no slip)接触模型外,考虑到壤土之间内聚特性较强,土壤间相互粘结,因此添加Hertz-Mindlin with bonding接触模型。依据文献[19]对于试验区相同类型土壤颗粒微观参数的测定和文献[20]适应大多数土壤模型所用的微观参数,如表1所示。
1.2.2土壤颗粒模型
为研究每一土壤颗粒的运动轨迹,设置土壤颗粒模型为单一颗粒。并修正实际中的土壤颗粒粒径,设置土壤颗粒半径为4 mm。
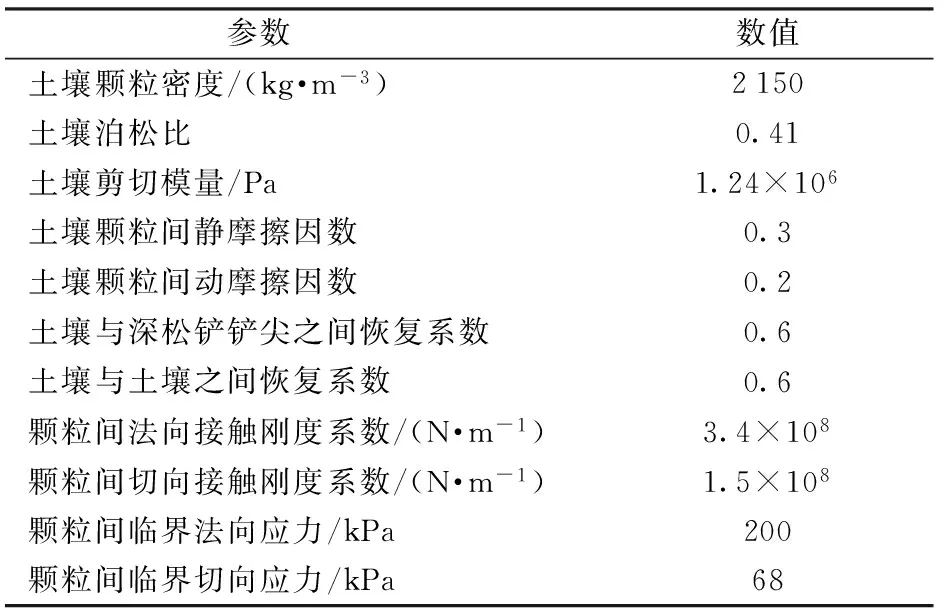
表1 离散元法仿真的微观参数Tab.1 Microscopic parameters of DEM simulation
1.3 仿真分析
1.3.1仿真几何模型的设置
在所设定的仿真模型中生成土壤颗粒,固定时间步长为8.2×10-5s,Rayleigth时间步长为5.47×10-4s。总土壤颗粒生成时间为8 s,土壤颗粒自然沉降1 s,铲尖入土深度为300 mm,运动时间为1 s,运动速度选取与深松铲正常作业相近的0.5 m/s,沿X轴正向,如图2所示。
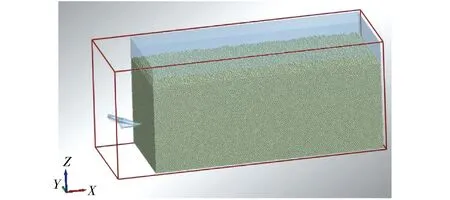
图2 仿真几何模型Fig.2 Simulation geometry model

图5 区域土壤颗粒的运动轨迹图Fig.5 Soil particle trajectory maps of various areas
1.3.2结果与分析
仿真完成后,观察铲尖作业后土壤的运动效果。由于铲尖作用正上方土壤颗粒在y轴方向上位移不明显,并参考文献[13],截取铲尖作用的铅垂面为剖视图,选择铲尖作业正上方的土壤颗粒,如图3,并分析其运动轨迹,如图4所示。
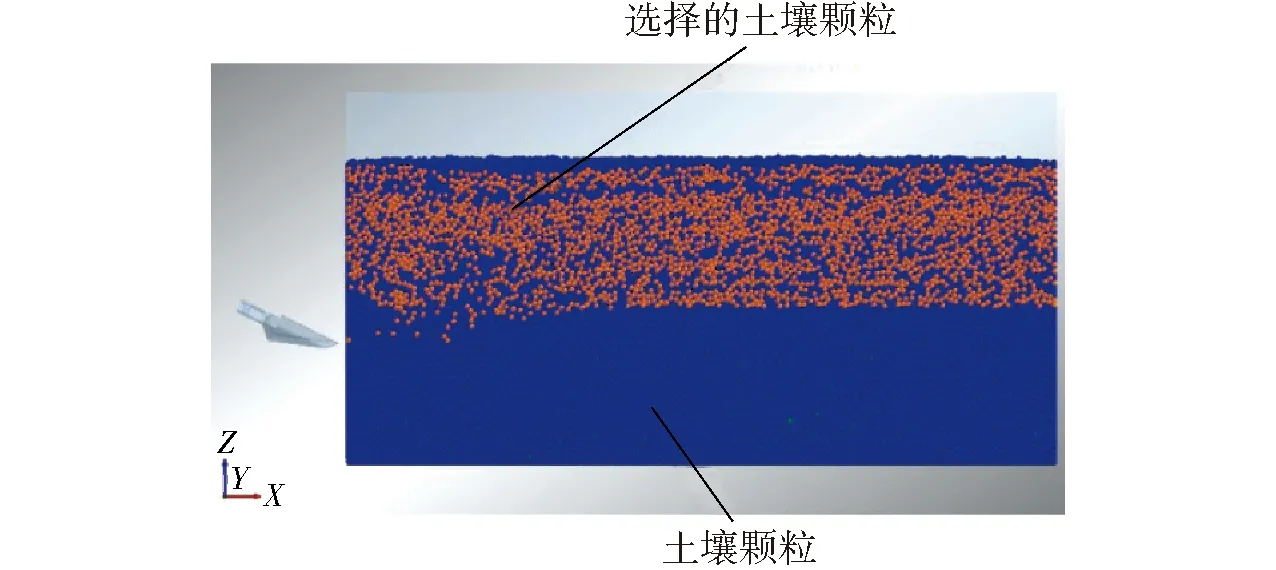
图3 土壤颗粒的选择Fig.3 Selection of soil particle
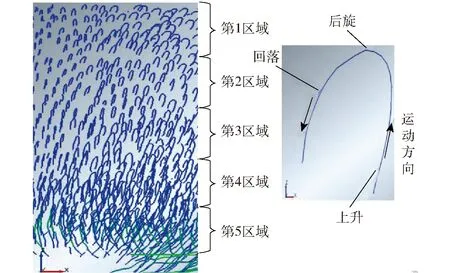
图4 土壤颗粒轨迹图Fig.4 Trajectory map of soil particle
由图4可以看出,每个土壤颗粒在X-Z平面内运动位移较大,且运动轨迹可分为3个过程,首先土壤颗粒被铲尖扰动上升,其次在铲尖通过后对前方的土粒再次扰动升起的过程中使其后旋,最后在铲尖完全通过此区域后回落。根据颗粒在不同深度的运动规律的不同,可将其沿Z轴负向平均分为5个区域(即深度方向),深度分别为60 mm,分析其运动轨迹,局部图如图5所示。

图6 区域单一土壤颗粒的轨迹图Fig.6 Single soil particle trajectory maps of various areas
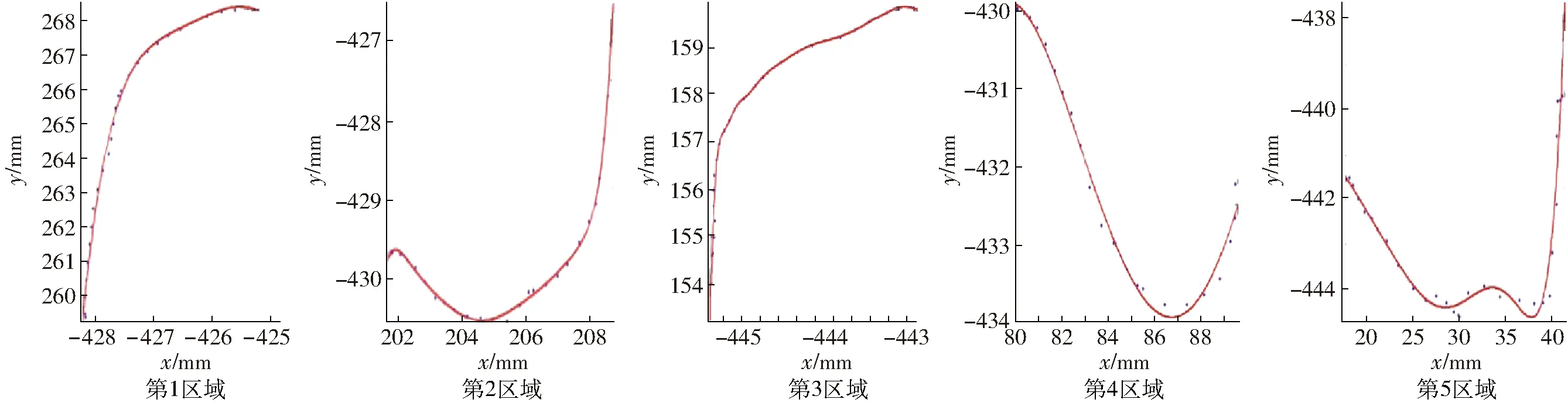
图7 土壤颗粒的轨迹拟合曲线Fig.7 Trajectory fitting curves of soil particles
为设计铲柄,选取回落轨迹段进行分析。对每一区域土壤颗粒运动轨迹进行分析。观察土壤颗粒坐标变化,其在Z轴方向最小位移为6 mm,最大位移为25 mm,且土壤颗粒直径为8 mm。为选取时在Z轴方向土壤轨迹不遗漏,在每一区域内按深度方向每间隔6 mm选取一粒土壤颗粒(选取5粒),输出每一颗粒的数据结果分别为每一时刻对应的X、Z坐标,时间步长为0.01 s,其Z坐标值显著变小时为土壤颗粒的回落轨迹段,得到在同一区域内,5颗土壤颗粒的回落轨迹段对于同一线形拟合方程的拟合度都较高。因此选择单一颗粒运动轨迹代表单一区域土壤颗粒运动轨迹,轨迹图如图6所示。选取其中单一颗粒,回落轨迹段内的坐标值在Matlab中做颗粒轨迹拟合曲线,结果如图7所示,并得到第1区域土壤轨迹拟合曲线回归方程为

(3)
第2区域土壤轨迹拟合曲线回归方程为
y=0.112 2x5+238.9x4+2.034×105x3+
8.658×1010x2+1.843×1010x+1.569×1012
(4)
第3区域土壤轨迹拟合曲线回归方程为
y=1.382×10-7x9-3.012×10-5x8+
0.002 905x7-0.162 8x6+5.843x5-
139.2x4+2 202x3-2.229×104x2+
1.311×105x-3.415 2×105
(5)
第4区域土壤轨迹拟合曲线回归方程为
y=-9.68×10-5x4+9.908×10-4x3+
0.444 1x2-0.111 3x-433.9
(6)
第5区域土壤轨迹拟合曲线回归方程为
y=1.702×10-7x7+1.718×10-5x6+
7.024×10-5x5+0.014 74x4+0.165 3x3+
0.944x2+2.342x-402.6
(7)
各个回归系数分别为0.975、0.997、0.997、0.990、0.925。每一区域数学函数曲线的拟合度都较高,可靠性较强,因此可以基于此线形设计深松铲铲柄的外轮廓曲线。
2 深松铲设计
传统深松铲一般包括铲柄与机架连接段、铲柄和铲尖,如图8所示。铲柄与机架连接段主要与机架连接,要求连接稳定性较强,并且可以调节深松铲入土深浅;主要作业部分为铲柄和铲尖。
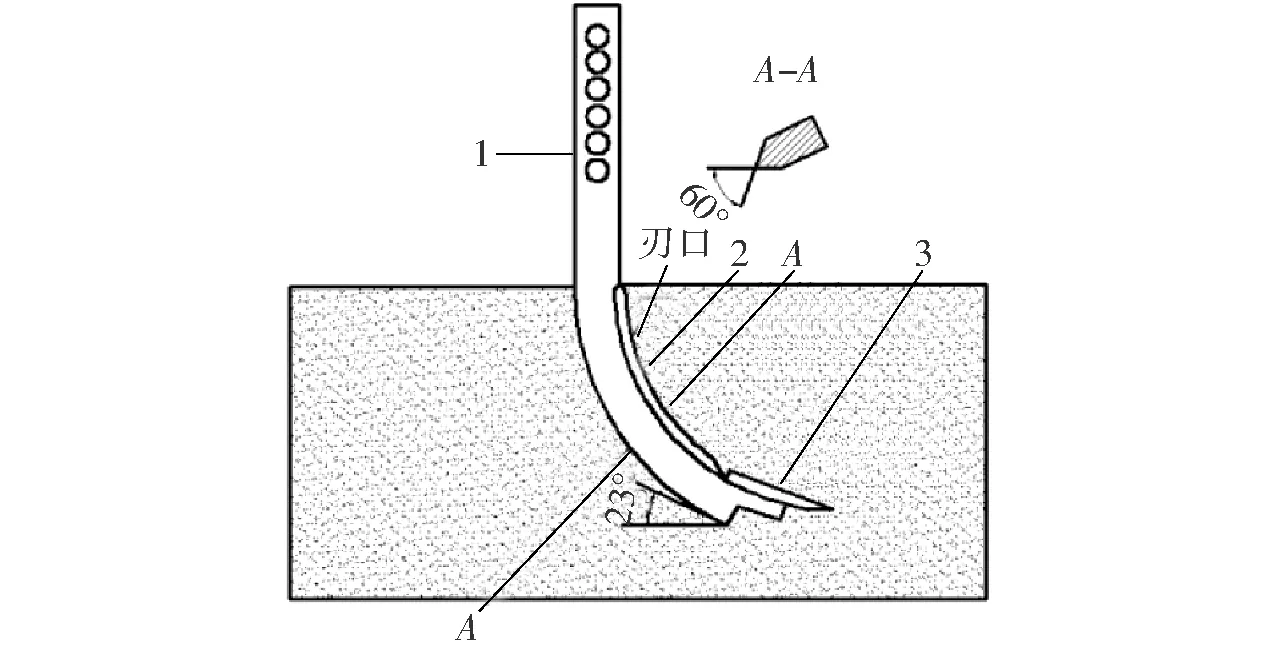
图8 传统深松铲示意图Fig.8 Diagram of traditional subsoiler1.铲柄与机架连接段 2.铲柄 3.铲尖
2.1 铲柄
为与大部分深松机灭茬机械、深松机、中耕施肥机械相配合,要求铲柄与机架连接段的设计与标准深松铲尺寸相符合[21]。
2.1.1铲柄线形的理论设计
为降低深松铲与土壤的碰撞,减小其扰动面积,同时降低耕作阻力。根据铲尖作业后土壤颗粒的运动轨迹,由表2建立数学模型平面图。经测量,东北垄作玉米播种深度为(50±10) mm,常年耕作形成的耕作层厚度为120 mm左右,犁底层厚度约为120 mm,心土层厚度为240 mm左右,在AutoCAD中建立各段曲线与土壤层对应关系,如图9所示。
2.1.2铲柄线形的优化
由图9可看出,铲尖作用后土壤颗粒回落轨迹1、2段曲线与水平方向夹角为锐角,可以利用滑移原理降低碰撞量和耕作阻力[22-24]。故将1、2段曲线的整体点坐标导入Matlab中拟合为第1段,作业时对应耕作层土壤;3、4段曲线呈现与水平方向的夹角由锐角向钝角过渡,因此将3、4段曲线的点坐标导入Matlab中拟合为第2段,作业时对应犁底层土壤;并将5段曲线的点坐标导入Matlab中拟合为第3段,5段曲线与水平方向夹角为钝角,可以增加对上方土壤的翻垡[1],故对应部分在犁底层之下,为心土层土壤,对犁底层的打破起到主要作用。本次拟合各段曲线在各方向上有平移,但曲线线形不变,各段线形拟合曲线如图10,拟合方程如表2所示。

表2 优化后土壤轨迹曲线方程Tab.2 Optimized soil trajectory curvilinear equation
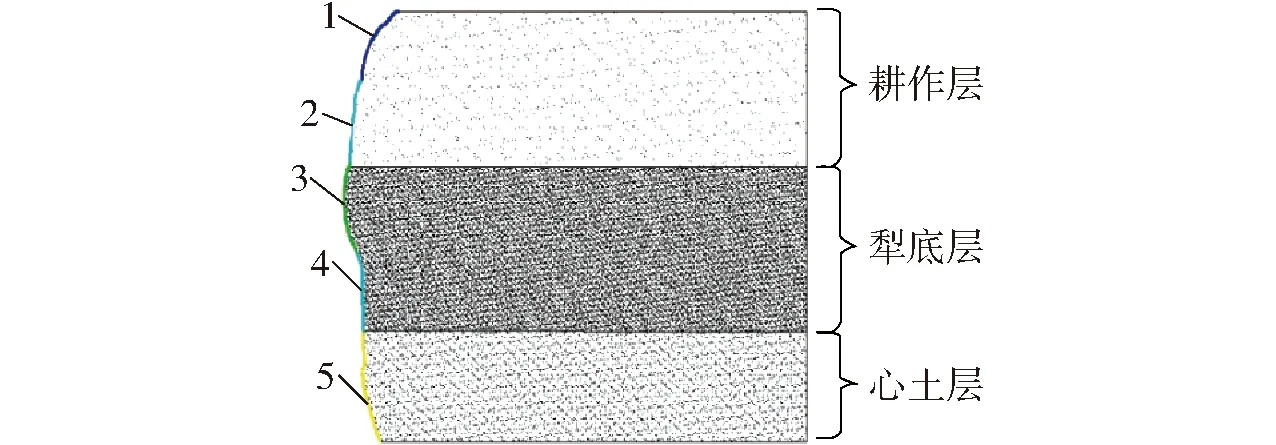
图9 数学函数曲线图Fig.9 Graph of mathematical function
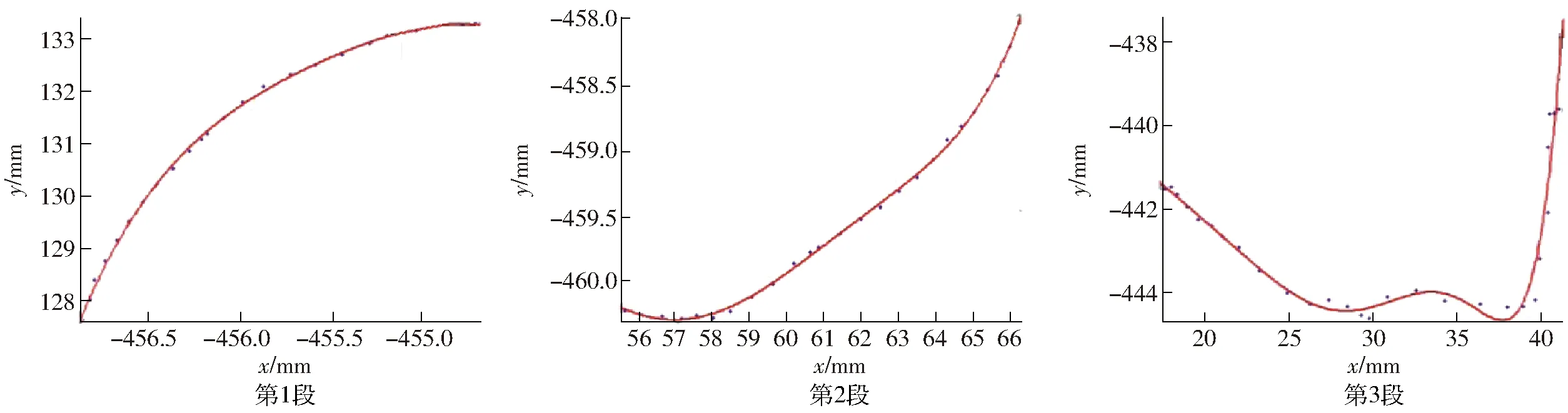
图10 优化后土壤轨迹曲线Fig.10 Optimized soil trajectory fitting curves
保证各段拟合曲线线形不变的前提条件下在AutoCAD中构建深松铲基本模型,按各层土壤厚度比相应扩大3段曲线。依据文献[25-26],采用线元设计法,将线形与连接不合理处优化为由多段圆弧和缓和曲线段(或直线段)顺序组合而成,从而减少连接处的应力集中问题,使铲柄受力更均匀。
在铲柄后端曲线的设计上,为适应土壤回落轨迹,增加回土量,降低土壤扰动,同时保证深松铲作业时受力更均匀,避免应力集中现象,铲柄后端曲线设计为优化后的3段拟合曲线,结果如图11。
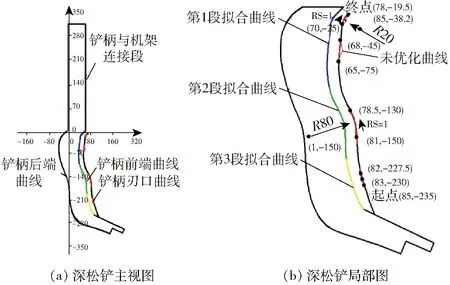
图11 拟合曲线型深松铲示意图Fig.11 Diagrams of fitting curve subsoiler
2.1.3刃口的设计
现深松铲刃部多为楔形刃或无刃口,楔形刃锥角设计较小时能够有效降低牵引阻力,但稳定性较差,容易折刃[27],不开刃深松铲虽然稳定性较强,但其牵引阻力较大[28]。部分增加刃口的深松铲刃口角度一般取60°,为楔形刃口,由文献[2]及观察深松铲作业时的实际状况,东北地区深松作业时,会使铲柄前段堆积为土核,如图12所示。
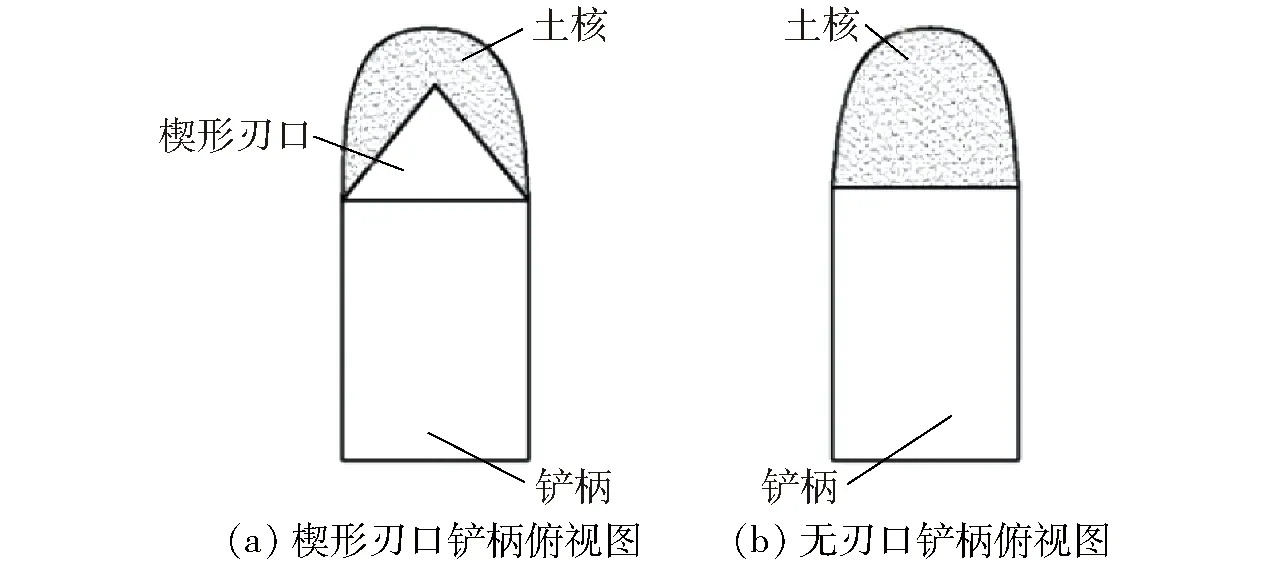
图12 土壤堆积示意图Fig.12 Diagrams of soil accumulation
现有的楔形刃深松铲和不开刃深松铲,在作业过程中刃口端堆聚的土核较多,增大了作业阻力,从而使作业性能受到影响。而国内文献中,针对此讨论的文献较少,单纯对深松铲模型进行受力分析,与实际工况下深松铲的形态有一定的差异性。且土核的堆聚多为外凸曲线状。因此依据文献[2],在刃口的线形设计上采取介于楔形刃和无刃口之间的外凸形轮廓曲线,降低耕作阻力的同时保证刃口的稳定性,且在作业中堆积的土核与轮廓曲线形状基本相似,可以减少土壤粘附,土核的堆聚可以忽略不计。得到深松铲刃口结构及受力如图13、14所示。
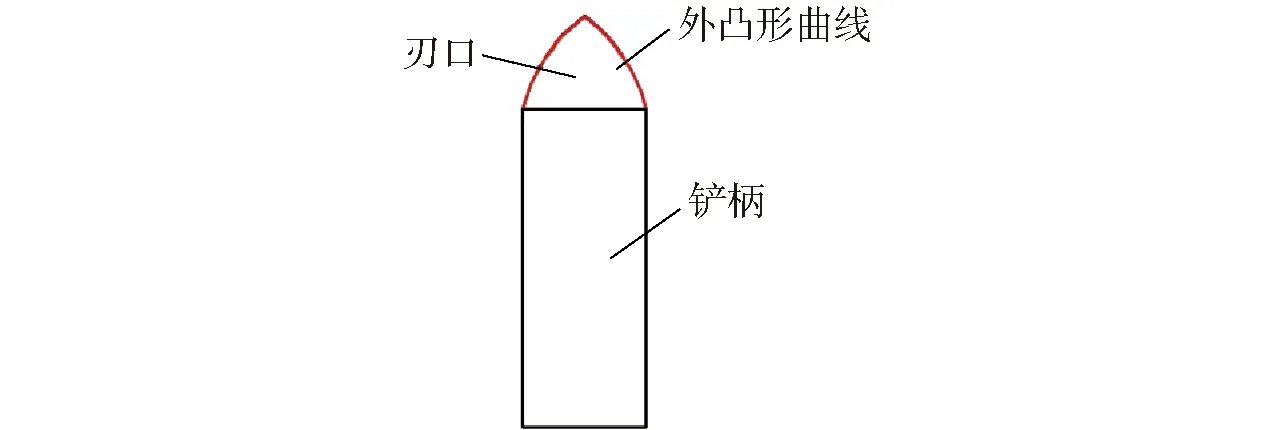
图13 刃口曲线示意图Fig.13 Diagram of blade curve
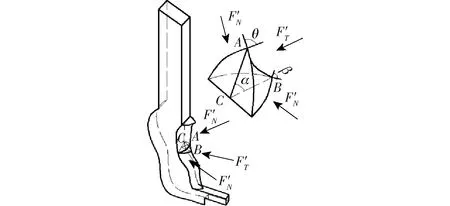
图14 刃口受力示意图Fig.14 Force diagram of edge
根据文献[29],刃口受到的阻力为
(8)
对式(8)进行推导得到
(9)
其中,将ABC视为直角三角形,A处为直角,则
(10)
式中β——刃口切削刃角在水平方向的投影,(°)
F′N——土壤对深松铲的法向作用力,N
F′T——土壤对深松铲刃的作用力,N
μ——深松铲与土壤间的动摩擦因数
θ——刃口切削刃角,(°)
α——刃口切削刃角平面与其在水平面间的夹角,(°)
在深松铲作业速度一定时,F′N、F′T视为理想常数值,μ视为定值,则刃口所受到的阻力与刃口切削刃角在水平方向的投影有关,β越小,受到的切削阻力越小。β又与α、θ有关,α越大,θ越小,β越小。深松铲柄切削刃角一般取值为30°~60°,其中壤土的最小切削刃角范围为40°~45°[30],外凸形曲线刃口稳定性较强,为减小阻力,取刃口切削角为40°。
2.2 深松铲作业深度、入土角、刃口高度的确定
犁底层是多年耕作形成的,打破犁底层可以使深松作业不用每年都进行,因此打破犁底层是设计深松铲作业深度时首先要考虑的因素,且犁底层的深度为120~240 mm,本设计中取深松铲作业深度为300 mm。深松铲的入土角是影响深松阻力的重要因素之一。入土角在21°[31]时耕作阻力最小,因此本设计入土角选为21°。
东北地区的壤土具有强烈胀缩和扰动特性,弹塑性极限较高,所以要对其破坏,刃口高度设置不宜过低,但刃口高度设置过高,稳定性会有所降低,容易折刃[27],因此取刃口高度为15 mm,保证切削刃角的同时,外凸形样条曲线连接。材料选为65Mn钢制造,刃部应进行热处理,淬火区为整个刃口部位,硬度为HRC48~56。深松铲如图15所示。
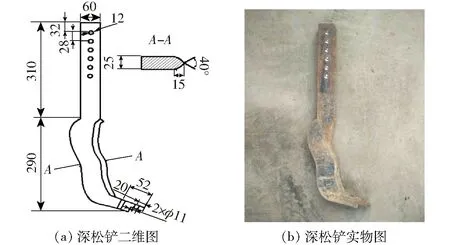
图15 拟合曲线型深松铲Fig.15 Fitting curve subsoiler
2.3 仿真验证试验
为证明设计思路的合理性,同时验证此设计的可行性,选择在EDEM软件中对所设计深松铲进行仿真试验,进一步验证铲尖作用时土壤颗粒的运动与所设计铲柄的关系。
2.3.1模型的建立
选择上述铲尖仿真试验的几何模型和土壤模型,按所设计深松铲尺寸在CATIA中建立拟合曲线型深松铲三维图,如图16所示,与铲尖通过螺栓连接装配,导入EDEM软件中。材料为65Mn钢,密度为7 865 kg/m3,剪切模量为7.9×1010Pa,泊松比为0.3。
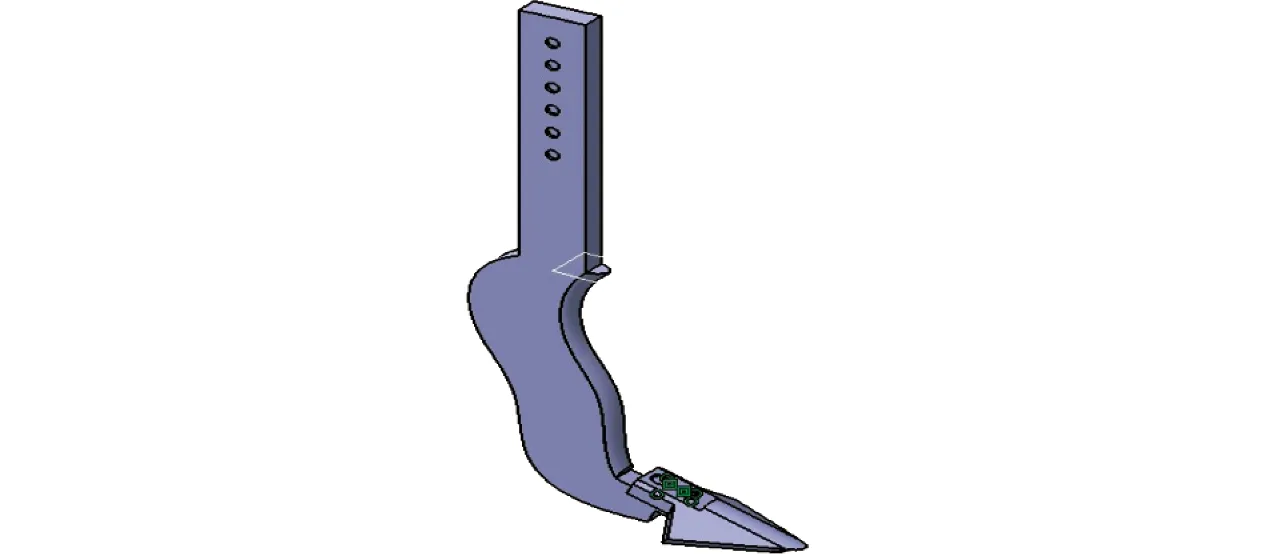
图16 拟合曲线型深松铲三维图Fig.16 Three-dimensional diagram of fitting curve subsoiler
2.3.2仿真几何模型的设置
建立深松铲与土壤的装配模型。固定时间步长为8.2×10-5s,Rayleigth时间步长为5.47×10-4s。深松铲入土深度为300 mm,运动时间为1 s,运动速度为0.5 m/s,沿X轴正向,如图17所示。
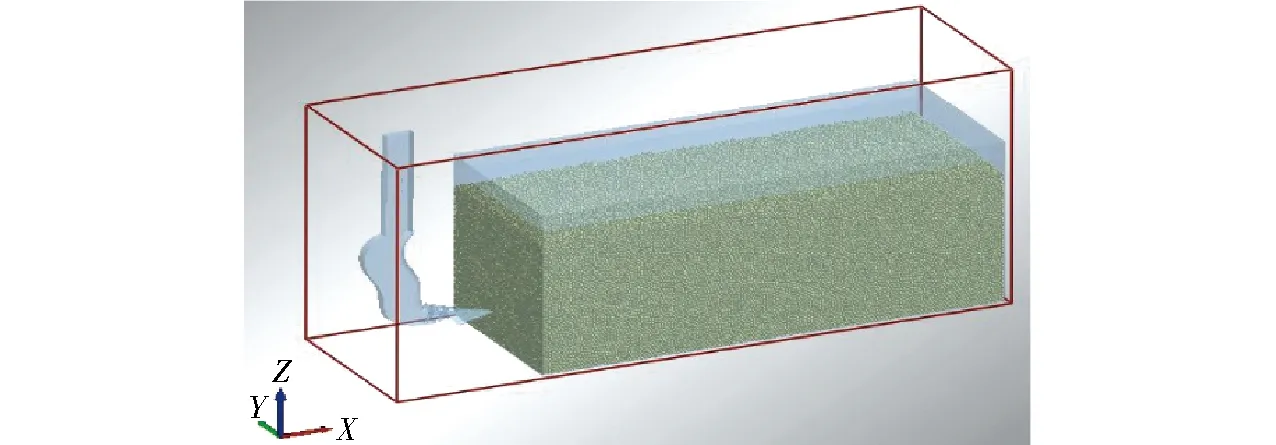
图17 深松铲仿真几何模型Fig.17 Simulation geometry model of subsoiler
2.3.3结果与分析
仿真完成后,观察深松铲作业时土壤的运动轨迹。截取铲尖作用的铅垂面为剖视图,选择铲尖作业正上方的土壤颗粒,并分析其运动轨迹,如图18所示。
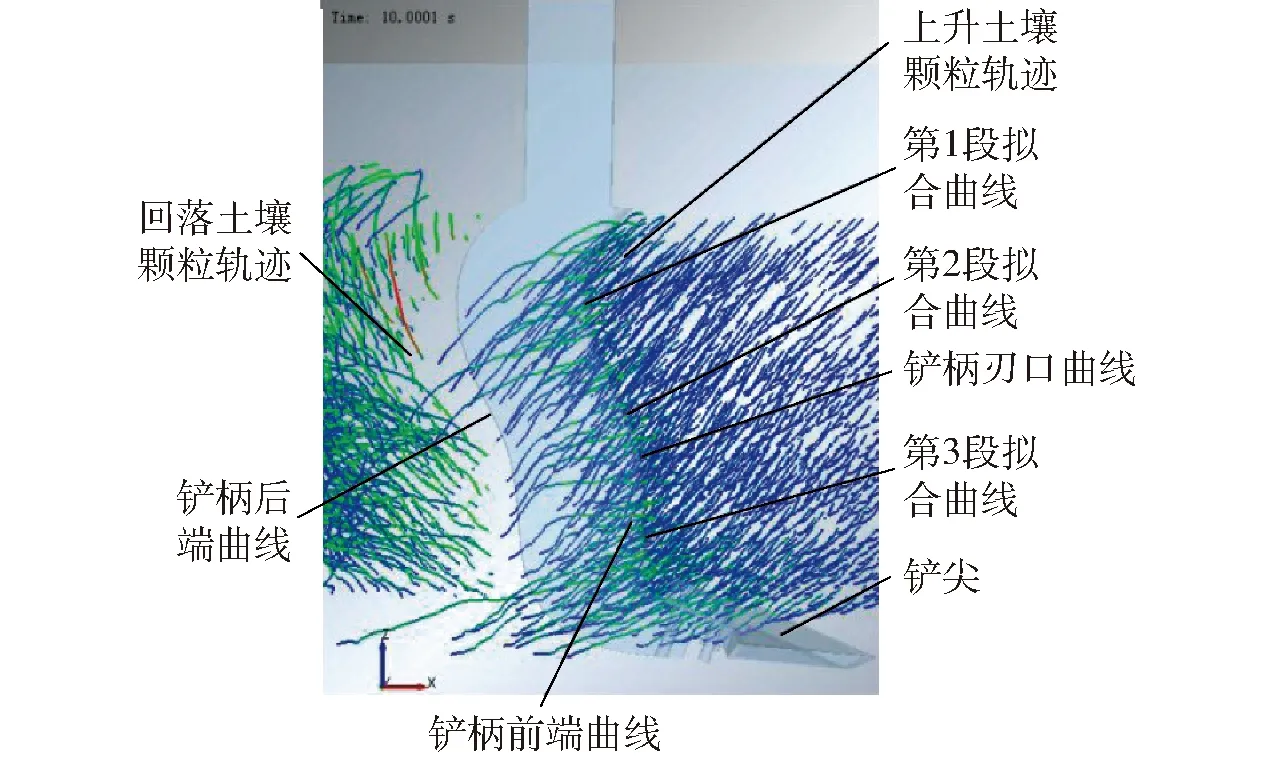
图18 深松铲作业时土壤颗粒轨迹图Fig.18 Trajectory map of soil particle by subsoiler
由仿真结果可得铲尖与铲柄在共同作业时,前方土壤颗粒在铲尖和铲柄前端及刃口第3段拟合曲线作用下向上翻垡,与第1段拟合曲线产生滑移。在深松铲作业后,土壤整体回落趋势轨迹与铲柄后端曲线基本一致。
因此仿真试验验证了铲柄前端及刃口设计曲线对土壤的作用形式;验证了铲柄后端曲线与土壤整体回落曲线一致;同时验证了本设计的可行性,以及本文总体设计思路的合理性。
3 土槽对比试验
3.1 试验目的
对上述所设计深松铲,取耕作阻力与土壤扰动量为试验指标,并探究深松铲对犁底层深度土壤容重的影响,对拟合曲线型深松铲与折线式、圆弧式深松铲进行对比试验,总结分析其试验效果,观察优劣性。
3.2 试验条件
力的对比试验对试验环境的稳定性要求较高,同时为了在对比试验效果时控制其它无关因素的一致性,因此对比试验采取土槽试验。在黑龙江省农业机械工程科学研究院的室内土槽中进行试验,试验设备如图19所示,试验选取土槽长50 m,宽3 m,土壤厚度1 m,其土壤为典型东北壤土,试验区所测土壤深度范围0~300 mm。人工浇水改变土壤含水率,并利用干燥法测量土壤含水率和容重,利用硬度仪测量土壤硬度。所有数据测量3点,取平均值。土壤参数如表3所示。

图19 土槽试验Fig.19 Soil bin test1.土槽车 2.测力架 3.限深轮 4.土槽 5.深松铲
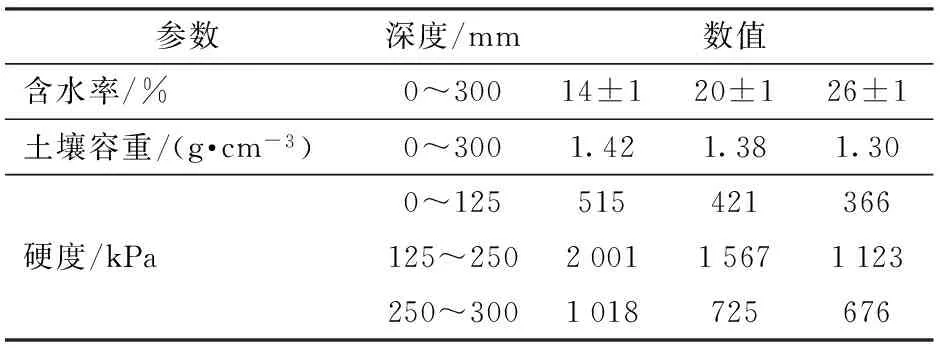
参数深度/mm数值含水率/%0~30014±120±126±1土壤容重/(g·cm-3)0~3001.421.381.300~125515421366硬度/kPa125~250200115671123250~3001018725676
试验所用器材有全液压四轮驱动车(土槽车)、黑龙江省农业机械工程科学研究院智能化研究所研制的六分力三向侧力装置。侧力装置分为上悬挂架和下悬挂架,两个架子间以6个拉力传感器(3个测量垂直力、2个测量水平力、1个测量侧向力)铰接相连。拟合曲线型深松铲与折线式、圆弧式深松铲分别与悬挂架通过顶丝固定。
3.3 试验方案
分别取拟合曲线型深松铲与折线式深松铲、圆弧式深松铲单独在土槽车工作速度为1、2、3 km/h的牵引带动下对土槽进行深松作业,深松铲入土深度都为300 mm。通过拉力传感器分别测出每种深松铲作业时的耕作阻力,利用沟形轮廓仪[32]对3种深松铲的沟形进行测量,并描绘在坐标纸上,示意图如图20,B为扰动宽度,D为堆顶宽度,d为开沟宽度,H为开沟深度,h为回土深度。同时随机取犁底层深度土壤样本,计算其土壤容重,为防止取样偶然性误差,每种铲型重复3次试验,计算其平均值,比较结果。
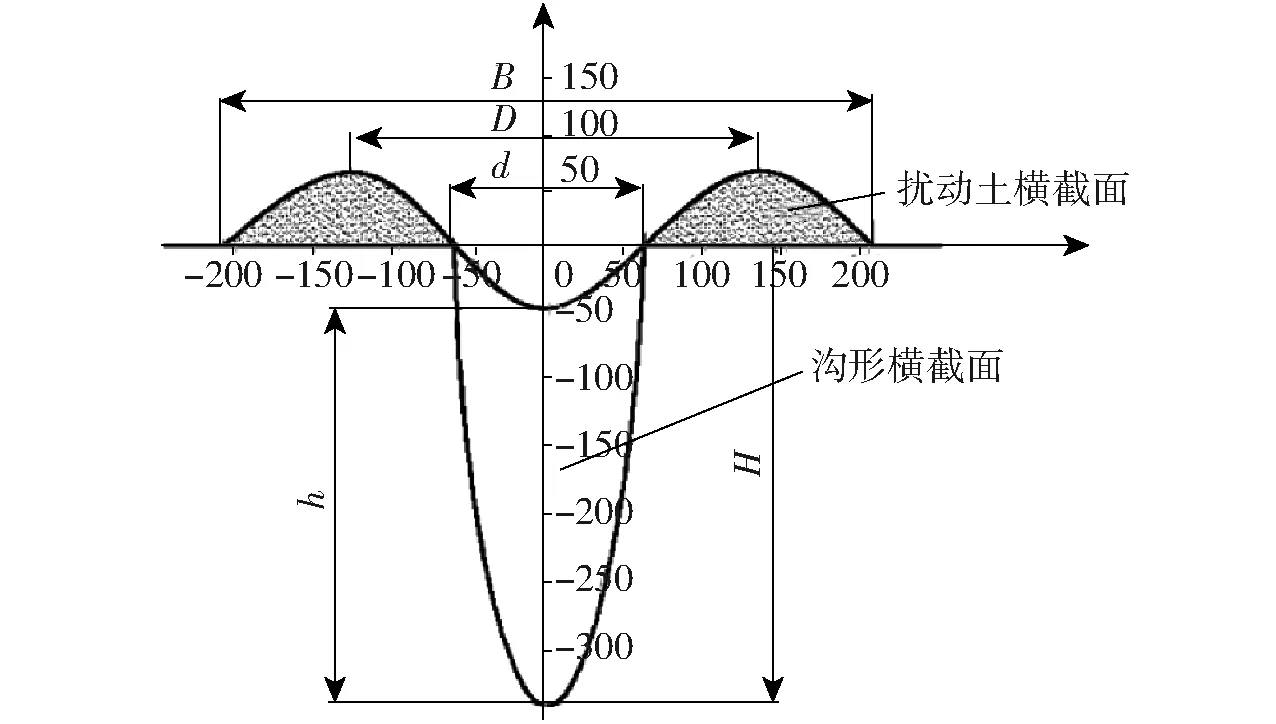
图20 沟形示意图Fig.20 Diagram of soil groove
图21 扰动面积与耕作阻力的性能对比Fig.21 Comparisons of performance between disturbed area and tillage resistance
3.4 试验结果与分析
犁底层深度土壤容重如表4所示。
表4 土壤容重统计Tab.4 Soil bulk density statistics g/cm3
记录并计算出试验所得数据,建立3种深松铲的扰动面积与速度、耕作阻力与速度在不同含水率下的效果对比图。
由图21得,扰动面积随着速度的增加而增大。同一工况下圆弧式深松铲的土壤扰动面积大于折线式深松铲,折线式深松铲土壤扰动面积大于拟合曲线型深松铲;在牵引阻力方面,折线式深松铲大于圆弧式深松铲,圆弧式深松铲大于拟合曲线型深松铲。圆弧式、折线式、拟合曲线型深松铲平均扰土面积为8 749.6、6 377.4、2 959.13 mm2,平均阻力为1 976、1 779.3、1 260.1 N。拟合曲线型深松铲土壤扰动量比折线式和圆弧式减少53.6%、66.18%,耕作阻力减少36.23%、29.18%。因此在深松铲的作用效果方面,拟合曲线型深松铲比其它深松铲性能较优。并由表4得,深松铲的作用能显著减小土壤容重,达到对犁底层的深松效果。
4 田间对比试验
4.1 试验目的与条件
本次试验田间土壤平均含水率为(20±1)%,未涉及到粘土量,且土壤板结较严重。因此选择土壤扰动量为指标,对拟合曲线型、圆弧式、折线式深松铲进行对比试验,并探究深松部件对犁底层土壤容重的影响,2017年5月在黑龙江省东北农业大学试验田进行田间试验,如图22所示。

图22 田间试验Fig.22 Field tests1.深松施肥机 2.拟合曲线型深松铲 3.圆弧式深松铲 4.约翰迪尔484型拖拉机 5.折线式深松铲 6.限深轮
试验区长50 m、宽6 m、土壤厚度1 m,其土壤为典型东北壤土。平均土壤容重为1.50 g/cm3,土壤硬度分别为:1 526 kPa(0~125 mm)、3 649 kPa(125~250 mm)、2 433 kPa(250~300 mm),调节限深轮与铲尖的高度差保证所设计3段工作刃与试验区相应土层相对应。试验所用器材有约翰迪尔484型拖拉机、深松施肥机(仅深松部件工作)、3种深松铲。
4.2 试验方案
拖拉机以正常田间作业2 km/h的速度进行深松作业,深松深度为300 mm。借鉴文献[33-34]对触土部件工作性能的评价方法,选取回土面积作为深松铲扰动量的评价指标。利用沟形轮廓仪[32]先对3种深松铲自然回土的横截面积进行测量,在坐标纸上绘制沟形曲线;而后将沟内回落土壤扒出,使其深度达到开沟深度,利用同一张坐标纸再次绘制沟形曲线。其回土面积示意图如图23所示,每种深松铲所开沟形随机测量5次,测量出回土面积,求其平均值。并随机选取各深松铲作业后的犁底层土壤样本5次,计算其土壤容重。
图23 田间试验沟形示意图Fig.23 Diagram of soil groove in field tests
4.3 试验结果
作业效果如图24所示。
图24 作业效果Fig.24 Operation effect
依据文献[33-36],土壤的扰动量可以由其回土量的多少来反映,相同深松深度条件下,回土量越大,其土壤扰动量越小,深松区域土壤越松散,效果越好;反之,回土量越小,其扰动量越大,深松区域土壤越少,水肥散失越严重。土壤容重则对作物苗期生长有显著性影响[37-38],3种铲型的回土量及犁底层土壤容重如表5所示。
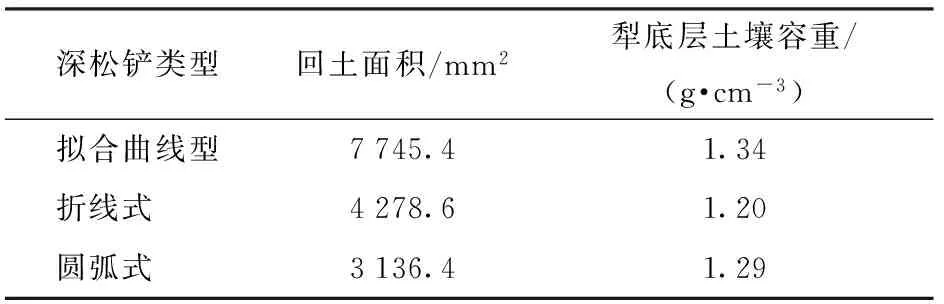
表5 验证试验结果Tab.5 Verification results of test
由表5各种深松铲的指标平均值可知,拟合曲线型深松铲的回土面积大于折线式,折线式深松铲的回土面积大于圆弧式;拟合曲线型深松铲的土壤扰动量小于折线式,折线式深松铲的土壤扰动量小于圆弧式,因此拟合曲线型深松铲深松效果最优。3种深松铲作业能够显著减小犁底层土壤容重,达到打破犁底层的要求。
5 结论
(1)依据深松铲铲尖运动的离散元(DEM)仿真试验分析,设计了拟合曲线型深松铲,并通过铲柄与铲尖互作效应仿真试验验证了设计思路的可行性与合理性。所设计拟合曲线型深松铲可以有效减小耕作阻力和表层土壤的扰动量,同时打破犁底层,降低犁底层的土壤容重。
(2)对所设计的拟合曲线型深松铲与其他类型深松铲进行土槽对比试验,测出拟合曲线型深松铲比折线式深松铲土壤扰动量减少了53.6%,耕作阻力减少了36.23%;拟合曲线型深松铲比圆弧式深松铲土壤扰动量减少了66.18%,耕作阻力减少了29.18%。验证拟合曲线型深松铲牵引阻力最小,土壤扰动量最小,指标较优。并且减小犁底层土壤容重,达到打破犁底层的要求。
(3)对拟合曲线型深松铲与其他类型深松铲进行田间对比试验,进一步证明拟合曲线型深松铲能够减小犁底层土壤容重,达到打破犁底层的要求。测出拟合曲线型、折线式、圆弧式深松铲的回土面积分别为7 745.4、4 278.6、3 136.4 mm2,分别增加81.03%和146.95%,验证了拟合曲线型深松铲比其他类型深松铲在回土面积指标上较优。田间试验与土槽试验均说明,拟合曲线型深松铲深松作业时土壤扰动量较小,更符合保护性耕作的要求。
1 王燕. 基于离散元法的深松铲结构与深松效果研究[D]. 长春:吉林农业大学,2014.
WANG Yan. Simulation analysis of structure and effect of the subsoiler based on DEM[D]. Changchun: Jinlin Agricultural University, 2014.(in Chinese)
2 龚皓晖. 基于土壤力学模型的深松铲有限元分析与结构优化[D]. 成都:西华大学,2013.
GONG Haohui.Finite element analysis and structure optimization for subsoiling shovel based on soil mechanics model[D]. Chengdu:Xihua University, 2013.(in Chinese)
3 邱立春,李宝筏. 自激振动深松机减阻试验研究[J].农业工程学报,2000,16(6):72-76.
QIU Lichun, LI Baofa. Experimental study on the self-excited vibration subsoiler for reducing draft force[J].Transactions of the CSAE, 2000, 16(6):72-76.(in Chinese)
4 SHAHGOLIA G, FIELKE J, SAUNDERS C, et al. Simulation of the dynamic behaviour of a tractor-oscillating subsoiler system[J]. Biosystems Engineering, 2010, 106(2):147-155.
5 李霞,付俊峰,张东兴,等. 基于振动减阻原理的深松机牵引阻力试验[J]. 农业工程学报,2012,28(1):32-36.
LI Xia, FU Junfeng, ZHANG Dongxing, et al. Experiment analysis on traction resistance of vibration subsoiler[J].Transactions of the CSAE,2012,28(1):32-36. (in Chinese)
6 张强,张璐,刘宪军,等. 基于有限元法的仿生钩形深松铲耕作阻力[J]. 吉林大学学报:工学版,2012,42(增刊1):117-121.
ZHANG Qiang, ZHANG Lu, LIU Xianjun, et al. Soil resistance of the bionic hook-shape subsoiler based on the finite element method[J].Journal of Jilin University:Engineering and Technology Edition, 2012, 42(Supp.1):117-121.(in Chinese)
7 龚皓晖,王霜. 仿生深松铲结构设计与有限元分析[J].农机化研究,2013,35(7):53-57.
GONG Haohui, WANG Shuang. Bionic subsoiler sructural design with the finite element analysis[J].Journal of Agricultural Mechanization Research, 2013, 35(7):53-57.(in Chinese)
8 张金波,佟金,马云海. 仿生减阻深松铲设计与试验[J/OL]. 农业机械学报,2014,45(4):141-145.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=20140422&journal_id=jcsam.DOI:10.6041/j.issn.1000-1298.2014.04.022.
ZHANG Jinbo,TONG Jin, MA Yunhai. Design and experiment of bionic anti-drag subsoiler[J/OL].Transactions of the Chinese Society for Agricultural Machinery, 2014, 45(4):141-145.(in Chinese)
9 朱风武,佟金. 土壤深松技术及高效节能仿生研究的发展[J].吉林大学学报:工学版,2003,33(2):95-99.
ZHU Fengwu,TONG Jin. Development of high efficient and energy saving bionic bubsoiling techniques[J].Journal of Jilin University:Engineering and Technology Edition, 2003, 33(2):95-99.(in Chinese)
10 黄玉祥,杭程光,苑梦婵,等. 深松土壤扰动行为的离散元仿真与试验[J/OL]. 农业机械学报,2016,47(7):80-88.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=20160712&journal_id=jcsam.DOI:10.6041/j.issn.1000-1298.2016.07.012.
HUANG Yuxiang,HANG Chengguang, YUAN Mengchan, et al. Discrete element simulation and experiment on disturbance behavior of subsoiling[J/OL].Transactions of the Chinese Society for Agricultural Machinery, 2016, 47(7):80-88.(in Chinese)
11 于建群,钱立彬,于文静,等. 开沟器工作阻力的离散元法仿真分析[J].农业机械学报,2009,40(6):53-57.
YU Jianqun, QIAN Libin, YU Wenjing, et al. Discrete element method of the resistances applied on furrow openers[J]. Transactions of the Chinese Society for Agricultural Machinery, 2009, 40(6):53-57.(in Chinese)
12 丁启朔. 耕作力学研究的土壤结构及其评价方法[D]. 南京:南京农业大学,2006.
DING Qishuo. Soil structure and its assessment for soil tillage research[D]. Nanjing:Nanjing Agricultural University, 2006.(in Chinese)
13 丁启朔,任骏,BELAL Eisa Adam,等. 湿粘水稻土深松过程离散元分析[J/OL].农业机械学报,2017,48(3):38-48.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=20170305&journal_id=jcsam.DOI:10.6041/jissn. 1000-1298.2017.03.005.
DING Qishuo, REN Jun,BELAL Eisa Adam, et al. DEM analysis of subsoiling process in wet clayey paddy soil[J/OL]. Transactions of the Chinese Society for Agricultural Machinery, 2017, 48(3):38-48.(in Chinese)
14 孟凤英. 粘性土壤破碎机理及分形规律研究[D]. 南京:南京农业大学,2009.
MENG Fengying. A study on the fragmentation mechanism of cohesive soil and its fractal characteristics [D]. Nanjing:Nanjing Agricultural University, 2009.(in Chinese)
15 周祖锷. 农业物料学[M].北京:中国农业出版社,1994.
16 JB/T 9788—1999 深松铲和铲柄[S].1999.
17 胡建平,周春健,侯冲,等. 磁吸板式排种器充种性能离散元仿真[J/OL].农业机械学报,2014,45(2):94-98.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=20140216&journal_id=jcsam.DOI:10.6041/j.issn.1000-1298.2014.02.016.
HU Jianping, ZHOU Chunjian, HOU Chong, et al. Simulation analysis of seed-filling performance of magnetic plate seed-metering device by discrete element method[J/OL]. Transactions of the Chinese Society for Agricultural Machinery, 2014, 45(2):94-98.(in Chinese)
18 韩燕龙,贾富国,唐玉荣,等. 颗粒滚动摩擦系数对堆积特性的影响[J]. 物理学报,2014,63(17):165-171.
HAN Yanlong,JIA Fuguo, TANG Yurong, et al. Influence of granular coefficient of rolling friction on accumulation characteristics[J].Acta Physica Sinica, 2014, 63(17):165-171.(in Chinese)
19 曹秀振. 基于离散元法的免耕播种开沟器的设计与试验[D]. 哈尔滨:东北农业大学,2016.
CAO Xiuzhen. Design and test of no-till seeding opener on discrete element method[D]. Harbin:Northeast Agricultural University, 2016.(in Chinese)
20 MUSTAFA U, JOHN M F, CHRIS S.Three dimensional discrete element modeling DEM of tillage accounting for soil cohesion and adhesion[J]. Biosystems Engineering, 2015, 129:298-306.
21 中国农业机械化科学研究院. 农业机械设计手册[M].北京:中国农业科学技术出版社,2007.
22 吉尔 W R,范德伯奇 G E. 耕作和牵引土壤动力学[M]. 耕作和牵引土壤动力学翻译组,译. 北京:中国农业机械出版社,1983.
23 DAMORA D, PANDEY K P. Evaluation of performance of furrow openers of combined seed and fertilizer drills[J]. Soil and Tillage Research, 1995, 34(2): 127-139.
24 TESSIER S, SAXTON K E, PAPENDICK R I,et al. Zero-tillage furrow opener effects on seed environment and wheat emergence[J]. Soil and Tillage Research,1991,21(3-4):347-360.
25 赵喜安. 公路线形的线元设计法[J].公路,1995(3):24-27.
26 张耀,曹小平,王春芬,等. 材料力学[M].北京:清华大学出版社,2015.
27 GILL W R, VANDEN B, GLEN E. Soil dynamics in tillage and traction[M].Agriculture Hanbook No.316.United States Department of Agriculutre,1967.
28 余泳昌,刘文艺,赵迎芳,等. 立柱式深松铲受力数学模型及试验分析[J]. 农业工程学报,2007,23(6):109-113.
YU Yongchang, LIU Wenyi, ZHAO Yingfang, et al. Force mathematical model and examination analysis of the column subsoiler[J].Transactions of the CSAE,2007,23(6):109-113. ( in Chinese)
29 许春林,李连豪,赵大勇. 北方大型联合整地机设计与试验[M]. 北京:中国农业大学出版社,2014:45-46.
30 郑侃,何进,李洪文,等.基于离散元深松土壤模型的折线破土刃深松铲研究[J/OL]. 农业机械学报,2016,47(9):62-72.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=20160910&journal_id=jcsam.DOI:10.6041/j.issn.1000-1298.2016.09.010.
ZHENG Kan, HE Jin, LI Hongwen, et al. Research on polyline soil-breaking blade subsoiler based on subsoiling soil model using discrete element method[J/OL].Transactions of the Chinese Society for Agricultural Machinery, 2016, 47(9):62-72.(in Chinese)
31 刘俊安,王晓燕,李洪文,等.基于土壤扰动与牵引阻力的深松铲结构参数优化[J/OL]. 农业机械学报,2017,48(2):60-67.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=20170208&journal_id=jcsam.DOI:10.6041/j.issn.1000-1298.2017.02.008.
LIU Junan, WANG Xiaoyan, LI Hongwen,et al. Optimization of structural parameters of subsoiler based on soil disturbance and traction resistance[J/OL]. Transactions of the Chinese Society for Agricultural Machinery, 2017, 48(2):60-67.(in Chinese)
32 AILI Hasimu, CHEN Ying. Soil disturbance and draft force of selected seed openers[J]. Soil & Tillage Research, 2014, 140:48-54.
33 赵淑红,刘宏俊,张先民,等. 滑推式开沟器设计与作业性能优化试验[J]. 农业工程学报,2016,32(19):26-34.
ZHAO Shuhong, LIU Hongjun, ZHANG Xianmin, et al. Design and optimization experiment of working performance of sliding push opener[J].Transactions of the CSAE,2016,32(19):26-34. (in Chinese)
34 陈玉仑. 稻麦联合收获开沟埋草多功能一体机的设计[D]. 南京:南京农业大学,2009.
CHEN Yulun. Design of harvest ditch and stank-disposing machine[D]. Nanjing:Nanjing Agricultural University, 2011.(in Chinese)
35 贾洪雷,郑嘉鑫,袁洪方,等. 仿形滑刀式开沟器设计试验[J]. 农业工程学报,2017,33(4):16-24.
JIA Honglei, ZHENG Jiaxin, YUAN Hongfang, et al. Design and experiment of profiling sliding-knife opener[J].Transactions of the CSAE,2017,33(4):16-24.(in Chinese)
36 李霞,张东兴,王维新,等. 受迫振动深松机性能参数优化与试验[J]. 农业工程学报,2015,31(21):17-24.
LI Xia, ZHANG Dongxing, WANG Weixin, et al. Performance parameter optimization and experiment of forecd-vibration subsoiler[J].Transactions of the CSAE,2015,31(21):17-24.(in Chinese)
37 李潮海,周顺利. 土壤容重对玉米苗期生长的影响[J].华北农学报,1994,9(2):49-54.
LI Chaohai, ZHOU Shunli. Influence of volume weight of soil on maize seedings growth[J]. Acta Agriculturae Boreali-Sinica, 1994, 9(2):49-54.(in Chinese)
38 李潮海,梅沛沛,王群,等. 下层土壤容重对玉米植株养分吸收和分配的影响[J].中国农业科学,2007,40(7):1371-1378.
LI Chaohai, MEI Peipei, WANG Qun,et al. Influences of soil bulk density in deep soil layers on absorption and distribution of nitrogen phosophrous and potassium in maize[J]. Scientia Agricultura Sinica, 2007, 40(7):1371-1378.(in Chinese)