仿生微型飞行器悬停飞行的空气动力学研究
2018-03-09吴江浩北京航空航天大学交通科学与工程学院北京100191
吴江浩, 周 超(北京航空航天大学 交通科学与工程学院, 北京 100191)
0 引 言
20世纪末,随着各种先进的微电子技术和微制造技术的迅速发展,人们提出了微型飞行器的概念[1]。“微型飞行器”(Micro Air Vehicles, MAV),是指一种较小的、可以用来完成某些军事或商业用途的飞行器。与传统的飞行器相比,MAV的尺寸约为其万分之一,重量约为其十万分之一,甚至更小,故称其为“微型”飞行器。体积小、重量轻、具有良好的隐蔽性和机动性的MAV,适于在较小的空间内飞行,完成观测、侦察、通讯、勘探、辅助救援等任务。因此,发展微型飞行器对未来国家安全和国民经济建设等方面均具有重要的意义。鉴于微型飞行器在国民经济及国防等领域的广阔应用前景,其一经提出便成为飞行器设计领域的研究热点。21世纪前10年,昆虫高升力机制等空气动力学理论的揭示更是极大地促进了微型飞行器的发展。在此背景下,美国、荷兰、韩国等国家相继研制出多款仿昆虫微型飞行器原理样机,在此基础上更是着重在其控制、动力及传感等领域开展研究及初步应用。
微型飞行器强调其悬停能力,这是使其能够在狭小空间作业的基础,因此设计可悬停的微型飞行器是十分重要的。微型飞行器空气动力学原理及特性是飞行器设计的基础,是开展微型飞行器其它相关学科研究的前提条件。在昆虫悬停高升力机制的启发下,微型飞行器悬停空气动力学的研究取得了长足的进步,昆虫飞行的高升力机制在多种微型飞行器上也得到了证实和应用。尽管微型飞行器的翼模仿昆虫翅运动,但目前设计的微型飞行器尺度明显大于昆虫,翼运动速度也高于昆虫,这使得二者的运动特征又有所区别。受加工工艺、材料特性等技术限制,微型飞行器机构设计、翼结构及其材料等也无法完全模仿昆虫。翼运动和结构形式上的差别也使微型飞行器的空气动力学问题有其自身的特点,因此在借鉴昆虫高升力机制的基础上对此问题细致展开研究已经成为学界的共识。此外,从微型飞行器设计的角度看,建立微型飞行器气动及结构设计方法也是微型飞行器空气动力学研究的重要内容。
1 仿生微型飞行器研究进展
1992年,美国兰德公司提交美国国防预研局(Defense Advanced Research Projects Agency,DARPA)的一份关于未来军事技术的研究报告首次提出了微型飞行器(MAV)的概念[1]。当前,微型飞行器主要有固定翼、旋翼及仿生扑翼三种类型,而后两种能够满足悬停飞行的要求。自然界生物利用拍动翅实现飞行,被认为具有良好的气动效率和飞行性能。因此,仿造生物飞行原理制造微型飞行器始终是微型飞行器研制的热点。微型飞行器研制需要解决气动、机械、动力、控制等关键技术,其中气动研究是其它系统及技术研究的基础。
1.1 国外研究现状
国外仿生微型飞行器研制领域,以美国、荷兰、韩国、日本等为代表,引领着仿生微型飞行器的发展方向,其研制的微型飞行器实验样机代表着当今微型飞行器的较高水平。以美国为例,DAPRA、NASA、美国空军以及NSF持续投入20余年(图1),除早期的Microbat等,近十年又有Hummingbird[2](图2a)、Robot Dragonfly(图2b)、Robobee[3-4](图2c)等仿生MAV问世,因此,美国在飞行器尺寸及重量、飞行控制及MEMS等方面的设计技术明显处于国际领先地位。
在DAPRA的支持下,哈佛大学Robobees团队开展了更小尺寸的仿蜜蜂微型飞行器的研制,并在2008年成功试飞了设计样机(图2c)。该样机翼展3 cm,重量仅有60 mg,其利用压电结构模仿昆虫翼高频(110 Hz)拍动产生升力,并可实现借助辅助外部传感器的悬停及机动飞行。
“Hummingbird”是Aero Vironment公司2011年研制成功的一种仿蜂鸟飞行方式、可在室内外操作飞行的MAV(图2a)。该飞行器具有类似蜂鸟的外形,翼展长16 cm,飞行器结构以及维持飞行各系统(含电池、电机和通信系统)以及摄像机等总重量19 g,可模拟蜂鸟的飞行方式做机动飞行和姿态控制、精准悬停并可迅速切换至快速机动状态。类似地,Maryland大学也研制了一款重量为62 g,拍动频率22 Hz的携带电池可飞的微型飞行器样机(图2d)。
自美国提出MAV概念后,其他国家也对MAV的研制表现出了浓厚的兴趣,并进行了相关研究,取得了一定的成果。其中最具代表性的是荷兰代尔夫特大学设计的Delfly系列微型扑翼飞行器(图3a)及德国Festo公司研制的仿蝴蝶(eButterfly,图3b)微型飞行器以及韩国Konkuk大学研制的拍动翼飞行器(图3c)。

(a) 荷兰代尔夫特大学研制的Delfly(b) 德国Festo公司研制的eButterfly (c) 韩国研制的Flapping aircraft
图3其他西方国家研制的仿生微型飞行器
Fig.3Bionicmicroairvehiclesdevelopedbytheothercountries
Delfly为例,它的研制是荷兰代尔夫特大学在荷兰应用科学研究中心支持下完成的。Delfly系列微型扑翼飞行器的设计开始于2005年,至目前为止已经经历了Delfly I (2005年)、Delfly II(2007年,图4a)、Delfly Micro(2008年)、Delfly Explorer (2013年)等型号。Delfly的众多改型中都具有成像系统和机载电源系统。Delfly Micro是其中尺寸最小、重量最轻的,其翼展长约10cm,装载相机后起飞重量约3.07g,是吉尼斯认证的世界上最小的飞行器。Delfly II之后的各型号均具有独立的室内飞行能力,可完成悬停、快速前飞等动作。Delfly Explorer 更已具备未知环境内障碍规避能力。
1.2 国内研究进展
国内科研机构针对微型飞行器的研究起步也较早。南京航空航天大学1998年就成立了微型飞行器研究中心,在国内较早地开展了微型飞行器相关的基础理论、实验技术和研制关键技术的研究,并研制了多种型号的仿生微型飞行器,如国内第一架微小型可控扑翼飞行器(图4a)。上海交通大学也着重开展了微型飞行器相关的MEMS、空气动力学等领域的研究,并制作了80 mg的仿蜂类微型飞行器样机(图4b)。北京航空航天大学也先后开展了仿蜂鸟微型飞行器及仿生扑旋翼研制(图4c和4d)。此外,国防科技大学、东南大学、哈尔滨工程大学等机构也开展了微型飞行器的研究和样机的研制。
以北京航空航天大学研制的仿蜂鸟微型飞行器为例。该飞行器重约25 g,翼展长20 cm,拍动频率最大可达35 Hz,当前已实现飞行器稳定悬停及简单机动。

(a) 南京航空航天大学研制的夜莺 (b)上海交通大学研制的仿昆虫微型飞行器

(c) 北京航空航天大学研制的仿蜂鸟微型飞行器 (d) 北京航空航天大学研制的扑旋翼飞行器
图4国内研制的仿生微型飞行器
Fig.4BionicmicroairvehiclesdevelopedinChina
目前,尽管国内微型仿生扑翼飞行器研究启动较早,也取得了一定的成绩,但相比于欧美等国家研制的MAV仍有较大的差距,主要体现在飞行器尺寸和重量相对较大、机构设计手段和飞行控制手段单一且功能简单、MEMS应用有限。相比西方国家的MAV能够携带电源自主飞行,并可携带照相、摄像设备、通讯系统、GPS导航定位等设备,可完成实时录像和数据传输等功能,目前国内研制的MAV仅部分能够实现带电源飞行,大部分尚不能进行带载荷、任务飞行,距离实用化还有很长的距离。
2 仿生微型飞行器空气动力学研究进展
过去20多年,科学界对昆虫飞行的高升力机制,如打开合拢机制[6-7]、延迟失速[8-9]等已经比较清楚,同时伴随着微机电加工制造工艺的进步,使仿生微型飞行器的研制成为可能。这其中,仿生微型飞行器空气动力学研究主要是为了验证仿生机理,并在微型飞行器上予以实现;通过对微型飞行器仿生布局及扑翼运动进行探究,明确设计参数对其气动特性、能耗及效率的影响,一方面验证设计方案是否满足升力等设计要求,另一方面为动力、导航、控制等系统的选型和研制提供依据。
2.1 仿生微型飞行器空气动力学研究方法
2.1.1 实验研究
实验测量是对仿生飞行主要的空气动力学机理进行探究的重要途径,也是观测微型飞行器非定常运动、测量气动力和力矩数据等最直接的研究手段。
微型飞行器尺寸小,速度低,绕MAV的流动为不可压低雷诺数流动,通常在空气或液体介质中[9-12]进行实验。在空气中进行实验,能够直接、真实模拟微型飞行器的运动,测量结果反映真实情况。但由于空气密度低,扑翼产生的力较小不宜测准,因而对力传感器的量程和测量精度都提出了较高的要求。在液体中开展实验时,由于液体密度大,黏性大,为保证Re不变,可增大尺寸,这样所测气动力的值会相对较高,这大大降低了对测力装置的要求。此外,液体黏性强,在保证Re下,也可降低拍动频率,使翼的运动速度减小,借助气泡[13-14]、PIV[15]等设备可更好地研究拍动翼的流场细致结构,更便于流动机理的研究。图5为国内外科研机构较为典型的水洞实验设备示例。其中图5(a)为美国密歇根大学的水洞[16],实验段尺寸为0.61 m×0.61 m(宽×高),来流速度可调范围为0.06~0.4 m/s,来流湍流强度可控制在1%以下。图5(b)为南洋理工大学的水洞实验台[17],该水洞装置收缩比为1:6,实验段尺寸为0.3 m×0.3 m×1.0 m,流动的不均匀度与湍流强度在进行MAV尺度的实验时均小于1%。

图5 国内外研究机构使用的风洞和水洞示例Fig.5 Wind tunnels and water tunnelsin MAV research
气动力的变化与翼周围的流场变化息息相关,往往也是通过对翼周围流场结构的研究来揭示拍动翼的仿生力学原理。因此,观测翼非定常运动引起的流场结构,特别是涡结构的演变,一直是拍动翼非定常气动力实验研究的重要内容。在过去的10年中,染色线法[18-19]、气泡法[13-14]及PIV(Particle Image Velocimetry,粒子图像测速法)手段[15]都被广泛地使用(如图6所示),极大推进了拍动翼非定常空气动力学及涡动力学的研究。
MAV的气动力的量值很小,一般最大为几百g,且呈现高频周期性变化,这都对气动力测量装置的精度和灵敏性提出了较高的要求[20]。例如,图5(a)所示的密歇根大学的水洞配套使用的型号为ATI mini40的六分量力传感器,其在翼型截面上的量程为±80 N,垂直于横截面方向的量程为±240 N,三个方向的力矩的测量量程则均为±4 N·m,力与力矩的灵敏度则分别为1/50N与1/2000 N·m。而西北工业大学为其微型飞行器专用风洞设计的配套三分力微量程天平[21],升力量程为±500 g,阻力量程为±300 g,纵向力矩量程为150 g·m,测量精度(相对均方根误差)分别可达0.5%、0.9%和0.2%,灵敏度为0.1 g和0.1 g·m。

(a) 烟线法

(b) 染色线法

(c) 水洞气泡法
此外,仿生微型飞行器空气动力学研究的一项重要内容是柔性对翼气动特性的影响,这对柔性变形的准确观测提出了较高的要求。过去的几十年中,高帧率和高分辨率图像拍摄设备的出现也使图像拍摄系统更为成熟。常见的图像拍摄系统[22-23]通常由三台或者三台以上高速摄像机和配套光源系统组成,各相机之间同步拍摄。高速相机拍摄帧率根据翼拍动运动频率确定,大多能够满足1000 fps的拍摄要求。为了便于获取翼的变形规律,翼上通常标记有记号点[24-25]。后期通过图像处理技术进行运动和变形重构。图7给出了佛罗里达大学扑翼实验装置,整个实验装置由拍动翼模型、三台高速相机、力传感器组成。图8给出了北京航空航天大学用于微型扑旋翼飞行器运动观测用的翼模型和实验测量装置[26],其中翼上带有标记点,便于后期特征运动分析。
2.1.2 数值研究
随着计算机技术的发展,数值仿真技术也得到了飞速发展,其在微型飞行器空气动力学的研究中发挥了越来越大的作用。在扑翼气动力求解过程中,主要有准定常方法[27-29]、面元法[30-31]、求解Euler方程方法[32]以及格子Boltzmann法[33]等。
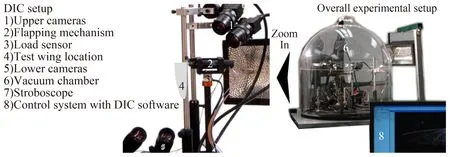
图7 佛罗里达大学扑翼实验装置Fig.7 Experimental device of University of Florida

图8 北京航空航天大学微型扑旋翼运动观测翼模型及设备Fig.8 Experimental device of Beihang University
准定常理论[27-29]是从传统翼型和机翼理论的基础上发展而来的,在该理论中翼拍动的某个瞬时状态被认为是定常运动。利用类似传统翼型理论来估算瞬时翼上的气动力。但与传统翼型理论不同的是该升力线斜率有所不同,考虑了非定常高升力机制的影响。此外,翼非定常运动产生的附加质量力也在气动力计算中予以考虑。准定常理论在非定常气动力估算与优化、飞行力学模型建立与分析等方面有广泛的应用。
准定常理论虽能较快获得翼瞬时气动力,但不能获得翼表面的压力信息及翼周围的流场信息。为提高计算精度,获得更丰富的流场信息,发展了面元法。面元法[30-31]基于速度势理论,将流场假定为不可压、无黏、无旋流动,此时流场中存在的速度位函数满足拉普拉斯方程。利用格林公式,将此控制方程转化为表面积分方程。通过在机翼表面布置一系列的偶极子和面元等(图9)来刻画机翼表面流动。通过求解偶极子和面元强度来间接计算机翼表面压强分布,获得机翼的气动力及力矩。但面元法的原理决定了它不能充分考虑黏性的影响,因而在估算低雷诺数下扑翼阻力时方面存在较大的误差。
为了研究黏性带来的影响,更准确揭示低雷诺数下的仿生飞行机理,人们开发了不可压N-S方程求解算法和程序,主要有涡量流函数法、泊松方程法、压强连结方程法(也称Simple方法)以及拟压缩性方法等[32]。不可压N-S方程为椭圆型,在求解过程中,压强的扰动信息会瞬间传遍全场,无法采用时间推进求解方法,因此早期涡量流函数法、泊松方程法及Simple方法等,大都采用压力与速度项解耦求解的方式。该类方法需反复修正压强和速度,收敛很慢。后来,一种能够实现压强与速度同时求解的拟压缩性算法被提出。Rogers等[34-35]设计了非定常形式的拟压缩性算法,该算法通过引入虚拟时间层,将不可压N-S方程由椭圆型转换为抛物型,在虚拟时间层上应用时间推进算法求解,实现了压力与速度的耦合求解,大大提高了求解效率。

图9 面元法计算得到的一个拍动周期后的翼后缘尾迹[31]Fig.9 Wake of flapping wing calculated by surface panel method after a flapping cycle[31]
传统的数值方法大多都是基于贴体网格,需要引入变形网格、多块网格以及嵌套网格等技术来处理运动物体的复杂运动,这不仅降低了流场求解的整体效率,也降低了数值求解的精度。近年来,一些基于笛卡尔网格的数值算法逐渐流行起来。在这些算法中,由于网格无需随运动物体而变化,因而相对简单高效。这类算法典型的包括浸润边界法和格子Boltzmann法[33]。其中格子Boltzmann法因计算简单,容易编程,具有良好的并行性和可扩展性,对大规模非定常流动问题的计算具有很大的优势,可以获得更为细致的流场微观结构,在多翼、翼身干扰等复杂气动干扰问题尤其具有优势,因此在仿生微型飞行器空气动力学的研究中的应用日益广泛。
2.2 空气动力学机理
仿生微型飞行器仿照自然界飞行生物的高升力机理进行设计。自然界中生物飞行升力产生的主要机制(如昆虫飞行采用的打开合拢[6-7]及延迟失速[8-9]等机制)均在仿生微型飞行器的设计中得到了证实和应用。
2.2.1 打开合拢机制
打开合拢机制是最早的用来解释昆虫飞行升力产生的机制。该机制由Weis-Fogh[6]提出,用于解释台湾小黄蜂翅产生高升力的原因。Weis-Fogh发现台湾小黄蜂悬停飞行下,先将两翅合拢至一起,然后将其打开至水平线上,如图10。之后,Cheng和Sun[7]也利用更高分辨率的高速相机拍摄了翅的这一运动。翅合拢将空气挤出,而当翅打开时,空气会迅速填补。在打开运动期间,每片翅周围的空气都获得了方向“正确”的环量,从而产生了附加的升力,如图10所示。后续针对打开合拢运动的PIV流动观测及测力实验及数值仿真计算[7]也分别表明打开合拢机制可以有效地增加气动升力。自然界中的诸多飞行生物,如蛾、蝴蝶、果蝇、黄蜂等,也都通过打开合拢机制提高气动效率。在当今,众多的仿生微型飞行器,如荷兰代尔夫特大学研制的Delfly系列飞行器[22, 24](图11)及韩国大学研制的采用X型翼布局以及大拍动幅度的设计的仿昆虫微型飞行器[36](图12)。对于此两种飞行器空气动力学的研究均发现,打开-合拢机制均在翼翻转过程中对升力产生有所贡献,类似于昆虫拍动的流场结构[37]也同样被观测到(图13)。

图10 打开合拢机制的示意图Fig.10 A sketch of mechanism of claps and flings

图11 Delfly II翼在一个周期内的拍动运动图像[24]Fig.11 Wing flapping motion images over a wingbeat of Delfly Ⅱ wing[24]

图12 Phan等人研究的微型飞行器一个周期内的拍动图像[36]Fig.12 Flapping image wing in a wingbeat captured by Phan et al[36]
2.2.2 延迟失速机制
前缘涡延迟失速[27-28]是昆虫飞行能够产生并维持高升力的最重要的机制。前缘涡的延时分离使得扑翼能够在较长时间内维持较高的升力。前缘涡与升力密切相关,因而其产生、发展及稳定性问题一直以来都是当前仿生微型飞行器空气动力学研究关注的重点。
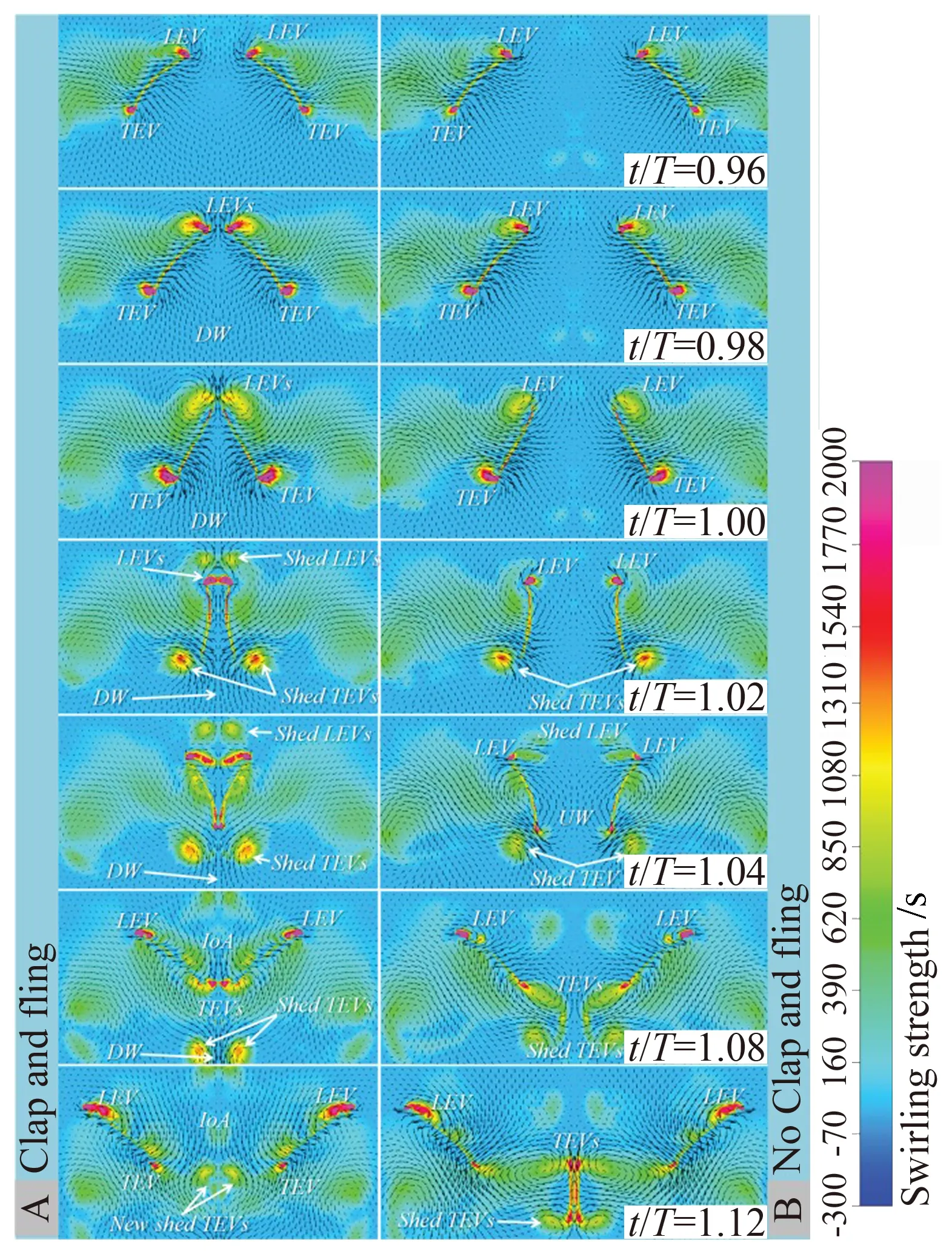
图13 有无打开-合拢效应的拍动翼弦向涡量场及速度矢量[37]Fig.13 Flapping wing vorticity and velocity vector with and without “claps and flings” mechanism[37]
众多学者采用不同的实验手段(如气泡实验、烟线法、PIV等)或数值求解方法[38-39]均在拍动翼上发现和证实了前缘涡的存在(图6)。随着更高精度的涡量场观测[40]也发现了前缘涡更为复杂的涡结构及其演化及发展运动(图14)。Harbig等[41]研究发现了前缘涡生成、脱落再附着直至当前缘涡强度超过一定的值从翼表面脱落的整个过程。当展弦比增大时,较小的Re数下出现双涡结构及涡破裂。前缘涡在距翼根约2倍弦长处就覆盖在上翼面。随着翼展弦比增加,前缘涡的上述变化更为迅速。上述变化在Phillips等[42](图15)、Han等[43]的实验及Garmann等[44]的数值仿真中得到证实。该现象更为清晰地揭示了前缘涡的发展过程,增加了人们对前缘涡形成机制的认识。




图14 不同展弦比和拍动幅度下的扑翼细致涡结构[40]Fig.14 Vortex structure with different aspect ratio and wing flapping amplitude[40]

图15 不同展弦比条件下翼表面涡结构[42]Fig.15 Vortex structure on wing surface in different aspect ratio[42]
前缘涡并非在所有条件下均能稳定存在,究竟是何种机制维持了前缘涡的稳定也是仿生微型飞行器空气动力学研究的热点问题之一。研究人员相继提出了诸多观点来解释这一问题,包括展向流稳定机制[8,45]及下洗流与翼尖涡稳定机制[46-47]等。由于二维平动中翼的前缘涡不稳定状态(图16a,b),而类似条件的旋转三维翼的前缘却是稳定的(图16c),因此Lentink和Dickinson[13]提出是翼旋转离心加速度与科氏加速度稳定了前缘涡。通过旋转坐标系下无量纲形式的N-S方程分析发现,该方程中离心加速度与科氏加速度两项前的系数都是Rossby数的倒数,因而据此推断低Rossby数(即离心加速度与科氏加速度前的系数较大)有利于前缘涡的稳定。Rossby数实际上等效为翼的展弦比,即低Rossby数条件就是小展弦比条件。统计自然界中许多昆虫、蜂鸟、蝙蝠以及鸟类的翅膀对应的Rossby数发现,其值大多集中在1的量级上,这被认为是这一理论正确性的间接证明。

图16 前缘涡稳定性实验测试(a)-(b)不稳定前缘涡;(c)稳定前缘涡Fig.16 Experimental test on the stability of the leading edge vortex
Harbig等[41]后续发现改变翼展弦比和前进比可改变前缘涡稳定性。但是在悬停状态,展弦比在3~7的范围内前缘涡都能够保持稳定,只有在更高的前进比和展弦比条件下才能得到不稳定的前缘涡(图17)。他们[48]将Lentink和Dickinson等[13]推导无量纲N-S方程中使用的长度参考量改为展长后发现,悬停时Rossby数则恒为1。在大前进比前飞时,翼下拍过程的Rossby数将远大于1,而此时的前缘涡会发生分离。因此,他们认为用展长作为长度参考量获得的Rossby数作为判断前缘涡是否会分离的依据更为恰当。总的来说,尽管研究人员从多个角度对前缘涡的稳定机制提出了诸多假设,这些理论使得前缘涡稳定性问题有了更为深刻的认识,但是这些论断都没有获得足够的证据支持,该问题后续仍需要进一步的研究。

图17 前缘涡稳定性与展弦比及前进比之间的关系[41]Fig.17 Relationship between the stability of the leading edge vortex and the aspect ratio as well as advanced ratio[41]
2.3 设计应用
2.3.1 气动总体设计方法及参数优化
仿生微型飞行器的研制需要明确其整体气动特性,即关注设计参数对飞行器总体气动力的影响规律,并据此开展微型飞行器气动总体设计。仿生微型飞行器总体设计参数主要有几何参数(如翼面积、展长、展弦比及根稍比等)及运动参数(如拍动频率、拍动幅度以及拍动运动模式等)。如何根据仿生微型飞行器的设计目标(如飞行器重量、尺寸等),确定微型飞行器的设计参数是仿生微型飞行器设计的重要内容。
仿生微型飞行器初始设计阶段设计参数的选择通常以下几种方法[49]:一种是根据给定的设计目标条件,参考仿生飞行生物的统计参数[50],依据经验公式来确定;另一种是参考现在已经研制出的其他微小型飞行器[49-51]的统计参数来确定。图18给出了现在已研制的仿昆虫微型飞行器重量与翼展关系图。除此之外,还有一些新型的概念设计方法被提出。如Whitney和Wood[52]将飞行器系统简化为动力-机构-翼模型,基于叶素理论及动力学线化理论建立了理论模型,之后采用能量分析的方法确定了动力系统及电池重量。Hassanalian等[49]也建立了一种计算算法,在他们的算法中,将飞行器总体设计的过程划分为任务分析、飞行模式确定、平面形状及展弦比确定、约束分析及重量估算等几个步骤(图19),结合一些经验公式确定仿生微型飞行器上将采用的拍动频率、St数、减缩频率、前进比及拍动角等参数。


图18 现有仿昆虫微型飞行器重量与翼展的关系图[51]Fig.18 Relationship between the weight of bionic flapping MAVs and the wingspan[51]

图19 拍动翼参数确定流程图[49]Fig.19 Flow diagram to determine the parameters of flapping wing[49]
基于仿生对象或者仿生飞行器各项参数建立的统计数据或经验公式通常用于建立仿生微型飞行器气动总体设计的初始方案。但初始方案通过模型机构、翼设计以及动力系统完成仿生微型飞行器原理样机后并不能完全满足设计的要求。因此仍需要对设计方案进行细化与改进,此时主要调整翼的几何和结构属性参数。一般都通过实验测试开展[53-54],这主要考虑两方面的因素:一方面是数值仿真不能准确地计算翼能耗,拍动翼的能耗由气动力和惯性力贡献,有正有负,当前对于负功在能耗中的计算方法仍然存在争议,且惯性功大小受翼结构显著影响,因此并不能准确估算能耗特性;另一方面的原因是,特殊翼布局形式(如X型扑翼)、结构形式等导致翼真实运动较为复杂,理论计算结果会与真实出现较大的偏差,相比数值计算方法,实验测试技术得到的结果更真实。表1和图20分别给出了Nan等[53]和Keennon等[2]研制一种仿蜂鸟的微型飞行器时所测试的翼模型参数及其它参数。在该模型中,他们通过变化翼的结构和尺寸,测试了攻角、展弦比、根稍比、面积二阶矩位置、翼面积等几何参数以及翼结构等设计参数对气动力的影响。通过实验测量的方法得到不同功率条件下、不同翼模型的升力值,构建了升力随设计参数的曲线族。通过对曲线族的分析对比,得到了在给定功率条件下最佳的翼设计方案。该流程也在哈佛大学 Robobee飞行器翼的设计过程中使用。
当前,多种仿生微型飞行器布局都可以实现悬停飞行,但针对不同的设计指标如何进行布局选择不甚清楚。针对该问题,不同的实验室也开展了一系列的研究,以期对微型飞行器气动布局的选择提供指导。Lentink等[55]与Kruyt等[56]基于相同的翼模型测量了翼旋转和拍动的气动效率,发现旋翼效率高于相同情况的扑翼。Kruyt等[56]进一步对比发现Hummingbird翼和商用微型旋翼气动效率接近。这些与先前结论不同的主要原因是翼的结构有所差别。Wu等[57]系统地对比了四种可悬停的微型飞行器气动布局,即旋翼、水平扑翼、竖直扑翼及扑旋翼的升力产生能力和气动效率(图21)。研究发现,当升力系数要求不高时,旋翼是气动效率最高的布局,但当需要较高时,只有扑旋翼能够满足这一要求。这一结论在Re数高于2000、拍动幅度大于70°的情况下仍然适用。而当小Re数(如<500)、小拍动幅度(如<70°)、小展弦比(如=3),水平扑翼和扑旋翼都能够以较高的效率产生较高的升力。但是这种考虑与实际仍一定的差距,在实际应用中,一般只给出升力的要求,而不对Re数进行限制。基于这一实际情况,他们[58]基于特定的升力要求对比了可变Re数下四种布局的功率消耗,发现如果四种布局以最高升力或最高效率的攻角产生升力,扑旋翼和旋翼分别是气动效率最高的方案。但总的来看,旋翼仍是最省功的布局形式。
2.3.2 翼柔性影响及其设计
微型飞行器的翼仿造自然界中的昆虫翅结构,质量轻,结构刚度较小,在运动过程中会发生明显的柔性变形。针对昆虫翅柔性的研究表明,柔性能够对翅气动力产生较为显著的影响[59-62]。仿昆虫微型飞行器设计也期望通过柔性设计实现改进飞行器气动性能的目标。此外,当前飞行器翼材料和结构设计使得翼在运动过程中产生的真实运动与飞行器期望实现的运动之间存在一定的偏差,导致气动特性的变化,因而也需要明确真实翼的气动性能。

表1 仿蜂鸟的微型飞行器测试翼几何参数[53]Table 1 The geometric parameters of the wing of a hummingbird like MAV[53]

图20 仿蜂鸟的微型飞行器测试翼[2]Fig.20 Wing of a hummingbird like microair vehicle in experiments[2]

图21 四种典型微型飞行器气动布局气动效率的对比[57]Fig.21 Aerodynamic efficiency comparison of four typical wing configuration[57]
在该问题中,首先要弄清的是仿生翼变形的支配因素及翼变形运动规律。Combes和Daniel[63]在空气和氦气中对真实鹰蛾翼的变形运动进行测量,结果发现尽管流体介质的密度降低了85%,但它对翼的弯曲变形幅度的影响较弱,这表明翼的变形主要是由惯性力导致的。鲍麟[64]、昂海松[65]以及Yin[66]等采用数值仿真的方法也验证了这一结论。惯性力在翼的柔性变形中占主导作用在很大程度上简化了后续微型飞行器翼变形影响分析及翼设计的难度,并在后续探究柔性对气动力的影响的研究中被广泛采用。过去借助高速摄像技术多个课题组对蝗虫[59]、蜻蜓[25]、蝇[67]等昆虫翅运动进行了拍摄,准确测量了柔性精确的变形规律,普遍将变形分为展向弯曲、展向扭转及其弦向弯度变形等三种类型[59-60],这为微型飞行器翼变形的测量提供了参考。微型飞行器翼的设计参考昆虫翅的结构设计,但由于翼普遍采用杆加膜的方案,结构过于简单,与昆虫翅结构相差甚远,因而翼的变形运动规律及因此产生的气动特性也与昆虫翅的存在较大的偏差。因此,在微型飞行器研究的过程中,越来越多的实验室对真实飞行器翼的变形运动进行测量或仿真计算,获取了更为准确的翼运动规律[22, 24-26],以此作为气动力分析的输入条件,明确气动力的变化规律。图22给出了Wu等[26]针对微型仿生扑旋翼的翼运动学测量结果。
以实验或者数值仿真得到的翼变形规律为输入,进一步对柔性翼的气动特性进行研究。Young等[59]测量了蝗虫前飞的翅变形随时间的变化,并采用数值方法计算了变形对气动力和能耗的影响,发现变形能显著降低飞行能耗。Du和Sun[61]基于Walker的观测数据,进一步分析了变形对升力影响及其原因。他们发现,相比刚性翼,柔性引入能够增加10%升力,减小5%的气动功,这分别是由翼的弯度和展向扭转引起的。Liu等[68]采用流固耦合数值仿真对鹰蛾翼的分析也得到相同的结论。昆虫翅柔性的研究也带动了仿生微型飞行器翼柔性的研究。针对拍动翼柔性的研究[59-61]表明:适当的柔性变化能够带来推力和升力的增加,并在一定程度上改进翼的推进效率。但并非所有的柔性都对推力特性的改善有益。柔性对推力的促进作用随着St数、来流速度等也有所变化。如Heathcote等[68-69]发现引入一定程度的弦向和展向柔性是有利的,但引入更强的柔性却是不利的。但何种柔性更有利于推进效率取决于振荡频率的大小[68-69]。针对柔性翼结构布局[71]或结构刚度[72-73]对翼气动力的影响也开展了一些实验,也发现适当的柔性才能起到促进作用。Wu等[71]研究机翼结构形式(图23)发现,机翼结构对推力的产生是极其关键的,但同时指出只有特定模态下产生的被动变形才能有效地产生推力。Zhao等[72-73]研究不同材质、厚度的单纯薄膜翼弦向柔性刚度对气动特性的影响,结果如图24所示。他们研究发现,薄膜机翼的气动特性随弦向刚度的减弱而变差(升力减小,升阻比减小),增强翼刚度会带来更大升力和阻力。但是大攻角下,柔性翼更有利于升力的产生。此外,考虑到自然界中生物翅均有翅脉支撑,Zhao等还测试了带翼脉支撑的柔性翼的气动特性,结果显示,带翼脉支撑下柔性翼的刚度增加能够提高翼的气动特性。Qi等[74]、Jaworski等[75]及Sallstrom[76]也均表明为了获得较大的推力或者升力需要对翼的柔性进行仔细的设计。


图22 仿生微型扑旋翼运动学规律[26]Fig.22 Kinematics of biomimetic micro rotary wing[26]
柔性对翼的气动特性可产生积极的影响,越来越多的研究除了只关注柔性变形对翼气动特性究竟有何影响外,还考虑如何通过空气动力学结合结构分析设计出性能更优良的翼。因此,翼结构优化设计[77]、结构及运动学全局优化设计[78-81]等问题得到广泛关注。
仿生翼结构分析和优化大多采用数值方法进行。当前,有限元、有限差分、边界元方法等结构变形求解程序,有限差分、有限体积及有限元方法等流场求解程序都已很成熟。流固耦合求解程序大多结合现有两种程序,采用松耦合方法进行构建,即在每个流固耦合求解周期内依次进行流场和变形信息求解。当前流固耦合数值仿真已经成为柔性翼气动特性分析的有效工具。相关工作可以参见Shyy等的综述文章[82]。
现在,利用流固耦合数值仿真程序,结合梯度法等优化方法构建仿生翼结构优化方法开展拍动翼结构优化设计。基于梯度法,Stanford等构建了悬停柔性拍动翼运动学参数及结构参数的优化方法。通过基于共旋近似的更新Lagragian格式构建了非线性结构求解器求取结构变形,利用二维准定常叶素理论计算翼气动力。优化过程中,选取优化变量,计算目标参数(如峰值功率系数等)对单独变量改变时的梯度,并据此进行目标参数优化。从某次针对功率系数峰值为目标、以扑翼厚度和弦长为优化变量的优化过程看,经过结构设计优化,峰值功率系数较之刚性翼的结果降低65%。在此算法的基础上,该课题组还将翼结构设计与运动学规律设计、机构设计[80](图25)等结合在一起,也取得了一定的效果。Stanford等人的优化中,将整个翼仍然基于同一种材料模拟,这与真实翼的设计仍有一定的差距。Choi和Park[81]按照机翼为真实“杆+膜”结构的设计方案来进行多学科优化,以实现推力和推进效率的最大化。在优化模型中,杆被简化为高密度的膜,通过对高密度区域的识别来确定杆的位置。这种优化方法更为接近于真实模型,为翼的优化设计提供一种有效思路。


图24 不同膜材料的翼阻力系数与升力系数随攻角的变化[72]Fig.24 Variation of drag and lift coefficient with angle of attack for wing with different membrane materials[72]
图25 结构与机翼拓扑优化Fig.25 Topology optimization of wing structure
3 未来发展方向
3.1 其他仿生高升力机制的应用
自然界中的昆虫种类众多,除当前研究的双翅目昆虫外,还有一些昆虫飞行的空气动力学原理仍不十分清楚,还有待进一步的解释。过去人们对蝇、蜂、蛾、蜻蜓、蝗虫等昆虫开展了大量的研究,揭示了“打开-合拢”、“延迟失速”、“快速翻转”等高升力机制。但自然界中还存在一些形态和运动较为特殊的昆虫,如蝴蝶和瓢虫等(图26)。目前针对这些昆虫的空气动力学问题研究相对较少,应用也较少。从形态学上讲,一些蝴蝶身体和翅膀尺寸相对较大、翅膀展弦比小、不同种类的蝴蝶身体形态和重心位置差别较大,而瓢虫的形态学特点则是具有一对硬壳在柔性翼的上方。从运动学上讲,蝴蝶翅膀拍动频率较低、拍动运动只有一个主要的自由度(其它昆虫一般是2~3个)、身体随翅膀拍动大幅晃动、腹部相对头胸部具有明显的运动;而瓢虫在飞行过程中,柔性翼反复拍动,硬壳展开在柔性翼上方,这明显不同于大多数昆虫仅采用拍动翼产生其气动力。蝴蝶飞行的气动原理涉及其身体动力学与翅膀空气动力学的耦合,而瓢虫的高升力机制则涉及刚柔双翼气动耦合,当前对于两类问题都还没有透彻的研究结论。两类昆虫的空气动力学问题较蝇、蜂等双翅目更为复杂,因而需根据它们的特点开展相应的运动学观测、流场测量及高精度数值仿真技术。借鉴上述研究手段,未来应着重关注蝴蝶、瓢虫翼及本体运动模式,翅膀与身体、翅膀与壳之间的复杂气动耦合作用原理等问题。对于此类昆虫飞行空气动力学的深入探究,有利于进一步增加人们对昆虫飞行高升力机理的认识,进而应用于微型飞行器设计中。
图26 飞行状态下的瓢虫形态Fig.26 Ladybird in flight
3.2 仿生翼气动设计及优化
昆虫翼是自然界生物进化的结果,昆虫翼与其运动相匹配,被认为能够获得优异的气动特性。当前,受材料、加工工艺等的影响,仿生的翼结构仍然多采用“杆+膜”的形式。这种布局形式使得一方面仿生微型飞行器机翼较昆虫翼质量重、比强度低,因而翼拍动过程中其惯性力耗功较多,使得电机大部分输出功率用于克服惯性力做功而非用于克服气动力做功,在微型飞行器整体重量限制较强、可携带电源有限的情况下显然不利于提升飞行器的升力产生能力。另一方面,“杆+膜”的翼结构形式使得其运动过程中的变形运动与公认的昆虫翼变形运动形式相差较远,显然这一变形运动对于改善翼气动特性并不是最优的。仿昆虫微型飞行器普遍无尾布局,机翼既是升力和推力的产生部件,也是姿态控制所需的气动力矩的产生部件。当前昆虫飞行姿态控制时所采用的翼运动控制的相关理论已经清楚,但如何通过对机翼结构的控制,灵活实现上述翼运动规律进而实现目标姿态控制仍面临挑战,也是未来翼设计的重要工作之一。因此,未来仍需要从增升、减阻、改善控制特性以及结构强度等多个角度,仿照昆虫翼开展更高性能的仿生翼的设计研究,重点解决仿生翼研制过程中新材料、新工艺、新设计理论和方法等问题。
3.3 仿生飞行力学及控制
通过对仿生微型飞行器空气动力学问题的研究可以解决飞行器“飞得起”的问题。在此基础上需进一步解决微型飞行器“飞得好”的问题。“飞得好”的问题依赖于飞行器飞行力学及控制方面的研究。自然界中的昆虫飞行是不稳定的,通过反馈适当控制参数,进而改变翼的运动参数实现增稳飞行。昆虫飞行力学和控制问题的研究可有利地指导微型飞行器设计。对微型飞行器仿生飞行力学及其控制的研究可借鉴昆虫飞行力学问题研究的思路开展。在明确微型飞行器基本气动特性的基础上,开展微型飞行器的飞行力学和控制的研究。采用实验或数值计算的手段明确飞行控制参数与飞行器气动力及力矩之间的关系,构建飞行器动力学模型,明确飞行器飞行动稳定性。进而根据飞行器稳定性特征,开展飞行控制问题的研究,重点关注增稳飞行策略和增稳飞行系统设计等关键问题,为实现机动、灵活、高效率的仿生微型飞行器奠定基础。
4 结束语
由于仿生微型飞行器在民用和军事领域的广阔应用前景,世界各国都非常重视仿生微型飞行器的研制。仿生微型飞行器空气动力学问题是仿生微型飞行器研制的基础和前提,过去的二十年得到广泛的研究,取得了一定的成果。
人们采用实验测试与理论分析的方法对仿生微型飞行器的空气动力学特性进行了研究。经过十几年的发展,采用缩比模型及实物模型研究飞行器气动原理及力学特性已经成为实验测试研究的主流方向。PIV等流动显示及观测手段也日益成熟。随着算法的改进及计算的普及,低阶简化模型及数值计算流场仿真手段也益成熟,使得高精度气动力获取、细致流场结构观测等成为现实。
悬停状态下仿生微型飞行器空气动力学机理始终是微型飞行器空气动力学问题研究的重点。“打开合拢机制”、“延迟失速”等昆虫飞行的高升力机制在仿生微型飞行器上得到应用。通过对前缘涡结构的形成、发展过程的探究,对前缘涡结构的细致观察,“低Rossby数”等新的前缘涡稳定机制也被提出,但未来仍需要进一步的研究。总的看,空气动力学机理的揭示为利用这些高升力机制指导微型飞行器设计提供了一定的指导。
为解决仿生微型飞行器初始设计阶段气动总体参数设计问题,提出了多种气动总体设计方法,但各种方法并不成熟,当前设计仍主要基于实验测量手段结合目标指标对设计参数进行研究和选择。优化飞行器翼几何、运动及结构参数改进飞行器气动性能也成为一大趋势。考虑到仿生微型飞行器设计涉及多学科,未来应进一步关注和推进气动与结构、控制等学科之间的交叉问题的研究。
未来,蝴蝶及瓢虫等昆虫飞行高升力机理仍有待进一步探讨,并开展相关仿生技术对此加以实现。仿昆虫翅结构和运动的仿生翼设计及优化也有待深入研究,以进一步改善飞行器的气动特性,从而实现可悬停及机动飞行的仿生微型飞行器。
[1]Mc Michael J, Francis M. Micro air vehicles-toward a new dimension in flight[R]. USA: DARPA/TTO, 1997
[2]Keennon M, Klingebiel K, Won H. Development of the nano hummingbird: A tailless flapping wing micro air vehicle[C]//50th AIAA Aerospace Sciences Meeting including the New Horizons Forum and Aerospace Exposition, Aerospace Sciences Meetings. Nashville, 2012. AIAA 2012-0588
[3]Ma K, hirarattananon P, Fuller S, et al. Controlled flight of a biologically inspired, insect-scale robot[J]. Science, 2013, 340(6132): 603-607
[4]Kuang P, Dorothy M, Chung S. Robobat: dynamics and control of a robotic bat flapping flying testbed[C]//AIAA Infotech at Aerospace Conference. St. Louis, 2011. AIAA 2011-1435
[5]De Croon G, Groen M, De Wagter C, et al. Design, aerodynamics and autonomy of the Delfly[J]. Bioinspiration & biomimetics, 2012, 7(2): 025003
[6]Weis Fogh T. Unusual mechanisms for the generation of lift in flying animals[J]. Scientific American, 1975. 233(5): 81-87
[7]Cheng X, Sun M. Wing-kinematics measurement and aerodynamics in a small insect in hovering flight[J]. Scientific Reports, 2016(6) : 1-12
[8]Ellington C P, Van Den Berg C, Willmott A, et al. Leading-edge vortices in insect flight[J]. Nature, 1996, 384: 626-630
[9]Dickinson M, Gotz K. Unsteady aerodynamic performance of model wings at low Reynolds numbers[J]. Journal of Experimental Biology, 1993, 174(1): 45-64
[10]Lehmann F, Sane S, Dickinson M. The aerodynamic effects of wing-wing interaction in flapping insect wings[J]. Journal of Experimental Biology, 2005, 208(16): 3075-3092
[11]Dickinson M, Lehmann F, Sane S. Wing rotation and the aerodynamic basis of insect flight[J]. Science, 1999, 284(5422): 1954-1960
[12]Zhang Z, Wang Q. Experimental techniques and applications of vertical type water tunnel of nanjing aeronautical institute[J]. Aerodynamic Experiment and Measurement and Control, 1989, 3(3): 37-42. (in Chinese)章仲安, 汪乔森. 南航立式水洞实验技术及应用[J]. 流体力学实验与测量, 1989, 3(3): 37-42
[13]Lentink D, Dickinson M. Rotational accelerations stabilize leading edge vortices on revolving fly wings[J]. Journal of Experimental Biology, 2009, 212(16): 2705-2719
[14]Van Truong T, Le T, Park H, Byun D. Experimental and numerical studies of beetle-inspired flapping wing in hovering flight[J]. Bioinspiration & Biomimetics, 2017, 12(3): 036012
[15]Zheng Y, Wu Y, Tang H. An experimental study on the forewing-hindwing interactions in hovering and forward flights[J]. International Journal of Heat and Fluid Flow, 2016, 59: 62-73
[16]Mc Gowan G, Granlund K, Michael V, et al. Investigations of lift-based pitch-plunge equivalence for airfoils at low reynolds numbers[J]. AIAA Journal, 2011. 49(7): 1511-1524
[17]Schlüter J. Aerodynamic study of the dart paper airplane for micro air vehicle application[J]. Proceedings of the Institution of Mechanical Engineers, Part G: Journal of Aerospace Engineering, 2014, 228(4): 567-576
[18]Jones A, Medina A, Spooner H, et al. Characterizing a burst leading-edge vortex on a rotating flat plate wingp[J]. Experiments in Fluids, 2016, 57(4): 1-16
[19]Bomphrey R, Taylor G, Thomas A. Smoke visualization of free-flying bumblebees indicates independent leading-edge vortices on each wing pair[J]. Experiments in Fluids, 2009, 46(5): 811-821
[20]Xiong C. Analysis and design of tail wing of micro flapping wing aircraft[M]. Xi’an: Northeast Polytechnical University, 2007. (in Chinese)熊超, 微型扑翼飞行器尾翼的分析与设计方法研究[D]. 西安: 西北工业大学, 2007
[21]Xie Y J, Ye Z Y, Bai J, et al. Design of strain-gage balances for micro air vehicles and their experiments in wind tunnel[J]. Journal of Expriment In Fluid Mechanics. 2006, 20(1): 23-26. (in Chinese)解亚军, 叶正寅, 白静, 等. 微型飞行器测量天平设计与风洞试验[J]. 实验流体力学, 2006, 1(1): 23-26
[22]Deng S, Percin M, Van Oudheusden B, et al. Experimental investigation on the aerodynamics of a bio-inspired flexible flapping wing micro air vehicle[J]. International Journal of Micro Air Vehicles, 2014, 6(2): 105-115
[23]Lind A, Jarugumilli T, Benedict M, et al. Flow field studies on a micro-air-vehicle-scale cycloidal rotor in forward flight[J]. Experiments in Fluids, 2014, 55(12): 1826
[24]Deng S, Percin M, van Oudheusden B W, et al. Numerical simulation of a flexible X-wing flapping-wing micro air vehicle[J]. AIAA Journal, 2017, 55(7): 2295-2306
[25]Koehler C, Liang Z, Gaston Z, et al. 3D reconstruction and analysis of wing deformation in free-flying dragonflies[J]. Journal of Experimental Biology, 2012, 215(17): 3018-3027
[26]Wu J, Qiu J, Zhang Y. Automated kinematics measurement and aerodynamics of a bioinspired flapping rotary wing[J]. Journal of Bionic Engineering, 2017, 14(4): 726-737
[27]Ellington C. The aerodynamics of hovering insect flight. I. The quasi-steady analysis[J]. Philosophical Transactions of the Royal Society of London. Series B: Biological Sciences, 1984, 305(1122): 1-15
[28]Sane S, Dickinson M. The aerodynamic effects of wing rotation and a revised quasi-steady model of flapping flight[J]. Journal of Experimental Biology, 2002, 205(8): 1087-1096
[29]Nabawy M, Crowther W. On the quasi-steady aerodynamics of normal hovering flight part I: The induced power factor[J]. Journal of The Royal Society Interface, 2014, 11(93): 20131196
[30]Katz J, Plotkin A. Low-speed aerodynamics: from wing theory to panel methods[M]. McGraw-Hill, 1991
[31]Smith M, Wilkin P, Williams M. The advantages of an unsteady panel method in modelling the aerodynamic forces on rigid flapping wings[J]. Journal of Experimental Biology, 1996, 199(5): 1073-1083
[32]Liu D. Fundation of computational fluid dynamic[M]. Beijing: Beihang Press, 1989. (in Chinese)刘导治. 计算流体力学基础[M]. 北京: 北京航空航天大学出版社, 1989
[33]Guo Z, Zheng C. Principle and application of lattice Boltzmann method[M]. Beijing: Science Press, 2009. (in Chinese)郭照立, 郑楚光. 格子Boltzmann 方法的原理及应用[M]. 北京: 科学出版社, 2009
[34]Rogers S, Kwak D. Upwind differencing scheme for the time-accurate incompressible Navier-Stokes equations[J]. AIAA Journal, 1990, 28(2): 253-262
[35]Rogers S, Kwak D, Cetin K. Steady and unsteady solutions of the incompressible Navier-Stokes equations[J]. AIAA Journal, 1991, 29(4): 603-610
[36]Phan H, Kang T, Park H. Design and stable flight of a 21 g insect-like tailless flapping wing micro air vehicle with angular rates feedback control[J]. Bioinspiration & Biomimetics, 2017, 12(3): 036006
[37]Phan H, Au T, Park H. Clap-and-fling mechanism in a hovering insect-like two-winged flapping-wing micro air vehicle[J]. Open Science, 2016, 3(12): 160746
[38]Liu H, Aono H. Size effects on insect hovering aerodynamics: an integrated computational study[J]. Bioinspiration & Biomimetics, 2009, 4(1): 015002
[39]Shyy W, Liu H. Flapping wings and aerodynamics lift: the role of leading-edge vortices[J]. AIAA Journal, 2007, 45(12): 2817-2819
[40]Carr Z, Chen C, Ringuette M. Finite-span rotating wings: three-dimensional vortex formation and variations with aspect ratio[J]. Experiments in Fluids, 2013, 54(2): 1444
[41]Harbig R, Sheridan J, Thompson M. The role of advance ratio and aspect ratio in determining leading-edge vortex stability for flapping flight[J]. Journal of Fluid Mechanics, 2014, 751: 71-105
[42]Phillips N, Knowles K, Bomphrey R. The effect of aspect ratio on the leading-edge vortex over an insect-like flapping wing[J]. Bioinspiration & Biomimetics, 2015, 10(5): 056020
[43]Han J, Chang J, Cho H. Vortices behavior depending on the aspect ratio of an insect-like flapping wing in hover[J]. Experiments in Fluids, 2015, 56(9): 181
[44]Garmann D, Visbal M. Dynamics of revolving wings for various aspect ratios[J]. Journal of Fluid Mechanics, 2014, 748: 932-956
[45]Van Den Berg C, Ellington C. The three-dimensional leading-edge vortex of a ‘hovering’model hawkmoth[J]. Philosophical Transactions of the Royal Society B: Biological Sciences, 1997, 352(1351): 329-340
[46]Birch J, Dickinson M. Spanwise flow and the attachment of the leading-edge vortex on insect wings[J]. Nature, 2001, 412(6848): 729-733
[47]Cheng B, Sane S, Barbera G, et al. Three-dimensional flow visualization and vorticity dynamics in revolving wings[J]. Experiments in Fluids, 2013, 54(1): 1-12
[48]Harbig R, Sheridan J, Thompson M. Reynolds number and aspect ratio effects on the leading-edge vortex for rotating insect wing planforms[J]. Journal of Fluid Mechanics, 2013, 717: 166-192
[49]Hassanalian M, Abdelkefi A, Wei M, et al. A novel methodology for wing sizing of bio-inspired flapping wing micro air vehicles: theory and prototype[J]. Acta Mechanica, 2017, 228(3): 1097-1113
[50]Zhang W, Hu C. Solar cell as wings of different sizes for flapping-wing micro air vehicles[J]. International Journal of Micro Air Vehicles, 2016, 8(4): 209-220
[51]Liu H, Ravi S, Kolomenskiy D, et al. Biomechanics and biomimetics in insect-inspired flight systems[J]. Philosophical Transactions of The Royal Society B Biological Sciences, 2016, 371(1704): 1-11
[52]Whitney J, Wood R. Conceptual design of flapping-wing micro air vehicles[J]. Bioinspiration & biomimetics, 2012, 7(3): 036001
[54]Hu H, Kumar A, Abate G, et al. An experimental investigation on the aerodynamic performance of flexible membrane wings in flapping flight[J]. Aerospace Science and Technology, 2002, 14(8): 575-586
[55]Lentink D, Dickinson M. Rotational accelerations stabilize leading edge vortices on revolving fly wings[J]. Journal of Experimental Biology, 2009, 212(16): 2705-2719
[56]Kruyt J, Quicazn-Rubio E, van Heijst G, et al. Hummingbird wing efficacy depends on aspect ratio and compares with helicopter rotors[J]. Journal of the Royal Society Interface, 2009, 11(99): 1-12
[57]Wu J, Zhou C, Zhang Y. Aerodynamic power efficiency comparison of various micro-air-vehicle layouts in hovering flight[J]. AIAA Journal, 2017, 55(4): 1265-1278
[58]Zhou C, Zhang Y, Wu J. Unsteady aerodynamic forces and power consumption of a micro flapping rotary wing in hovering flight[C]//The 1st International Youth Conference of Bionic Science and Engineering. Lanzhou: Conference of Bionic Science and Engineering, 2017
[59]Young J, Walker S, Bomphrey R, et al. Details of insect wing design and deformation enhance aerodynamic function and flight efficiency[J]. Science, 2009, 325(5947): 1549-1552
[60]Nakata T, Liu H. Aerodynamic performance of a hovering hawkmoth with flexible wings: A computational approach[J]. Proceedings of the Royal Society of London B: Biological Sciences, 2011, 279(1729): 722-731
[61]Du G, Sun M. Effects of wing deformation on aerodynamic forces in hovering hoverflies[J]. Journal of Experimental Biology, 2010, 213(13): 2273-2283
[62]Mountcastle A, Combes S. Wing flexibility enhances load-lifting capacity in bumblebees[J]. Proceedings of the Royal Society B Biological Sciences, 2013, 280(1759): 20130531
[63]Combes S, Daniel T. Into thin air: Contributions of aerodynamic and inertial-elastic forces to wing bending in the hawkmoth Manduca sexta[J]. Journal of Experimental Biology, 2003, 206(17): 2999-3006
[64]Bao L, Tong B G. Passive elastic deformation and aerodynamic corresponce in flapping motion of model insect wing[J]. Journal of Graduate School of Chinese Academy of Sciences, 2005, 22(6): 676-682. (in Chinese)鲍麟, 童秉纲. 模型昆虫翼拍动运动中被动弹性变形及其气动力响应[J]. 中国科学院研究生院学报, 2005, 22(6): 676-682
[65]Zeng R, Ang H S, Mei Y, et al. Flexibility of flapping wing and its effect on aerodynamic characteristic[J]. Chinese Journal of Computational Mechanics, 2005, 22(6): 750-754. (in Chinese)曾锐, 昂海松, 梅源, 等. 扑翼柔性及其对气动特性的影响[J]. 计算力学学报, 2005, 22(6): 750-754
[66]Yin B, Luo H. Effect of wing inertia on hovering performance of flexible flapping wings[J]. Physics of Fluids, 2010, 22(11): 111902
[67]Zhang Y, Sun M. Wing kinematics measurement and aerodynamics of free-flight maneuvers in drone-flies[J]. Acta Mech Sinica, 2010, 26(3): 371-382
[68]Heathcote S, Martin D, Gursul I. Flexible flapping airfoil propulsion at zero freestream velocity[J]. AIAA Journal, 2004, 42(11): 2196-2204
[69]Heathcote S, Gursul I. Flexible flapping airfoil propulsion at low Reynolds numbers[J]. AIAA Journal, 2007, 45(5): 1066-1079
[70]Heathcote S, Wang Z, Gursul I. Effect of spanwise flexibility on flapping wing propulsion[J]. Journal of Fluids and Structures, 2008, 24(2): 183-199
[71]Wu P, Ifju P, Stanford B. Flapping wing structural deformation and thrust correlation study with flexible membrane wings[J]. AIAA Journal, 2010, 48(9): 2111-2122
[72]Zhao L, Huang Q, Deng X, et al. The effect of chord-wise flexibility on the aerodynamic force generation of flapping wings experimental studies[C]//2009 IEEE International Conference on Robotics and Automation Kobe International Conference Center. Kobe, 2009: 4207-4212
[73]Mountcastle A, Combes S. Wing flexibility enhances load-lifting capacity in bumblebees[J]. Proceedings of the Royal Society B: Biological Sciences, 2013, 280(1759): 1-8
[74]Qi D, Gordnier R. Effects of deformation on lift and power efficiency in a hovering motion of a chord-wise flexible wing[J]. Journal of Fluids and Structures, 2015, 54: 142-170
[75]Jaworski J, Gordnier R. Thrust augmentation of flapping airfoils in low Reynolds number flow using a flexible membrane[J]. Journal of Fluids and Structures, 2015, 52: 199-209
[76]Sällström E, Ukeiley L, Wu P, et al. Three-dimensional averaged flow around flexible flapping wings[C]//39th AIAA Fluid Dynamics Conference, Fluid Dynamics and Co-located Conferences. San Antonio, 2009. AIAA 2009-3813
[77]Stanford B, Beran P. Optimal thickness distributions of aeroelastic flapping shells[J]. Aerospace Science and Technology, 2013, 24(1): 116-127
[78]Bryson D, Stanford B, Mc Clung A, et al. Multidisciplinary optimization of a hovering wing with a service-oriented framework and experimental model validation[C]//49th AIAA Aerospace Sciences Meeting including the New Horizons Forum and Aerospace Exposition, Aerospace Sciences Meetings. Orlando, 2011. AIAA 2011-1133
[79]Isogai K, Harino Y. Optimum aeroelastic design of a flapping wing[J]. Journal of Aircraft, 2007, 44(6): 2040-2048
[80]Stanford B, Beran P, Kobayashi M. Simultaneous topology optimization of membrane wings and their compliant flapping mechanisms[J]. AIAA Journal, 2013, 51(6): 1431-1441
[81]Choi J S, Park G J. Multidisciplinary design optimization of the flapping wing system for forward flight[J]. International Journal of Micro Air Vehicles, 2014, 9(2): 93-110
[82]Shyy W, Aono H, Chimakurthi S K, et al. Recent progress in flapping wing aerodynamics and aeroelasticity[J]. Progress in Aerospace Sciences, 2010, 46(7): 284-327
[83]Sun M. Insect flight dynamics: Stability and control[J]. Reviews of Modern Physics, 2014, 86(2): 615
[84]Zhang Y, Sun M. Dynamic flight stability of a hovering model insect: lateral motion[J]. Acta Mech Sinica, 2010, 26(2): 175-190
[85]Liang B, Sun M. Dynamic flight stability of a hovering model dragonfly[J]. Journal of theoretical biology, 2014, 348: 100-112
[86]Bluman J, Kang C K. Wing-wake interaction destabilizes hover equilibrium of a flapping insect-scale wing[J]. Bioinspiration & Biomimetics, 2017, 12(4): 046004
[87]Fuller S B, Teoh Z E, Chirarattananon P, et al. Stabilizing air dampers for hovering aerial robotics: Design, insect-scale flight tests, and scaling[J]. Autonomous Robots, 2017, 41(8): 1555-1573.