一种折射星图的模拟方法
2018-03-08蔡佳楠
孙 龙,蔡佳楠
(中国电子科技集团公司第三十八研究所,安徽 合肥 230088)
随着载人航天、深空探测等空间技术的发展,各类航天器对自主导航能力的要求越来越高。导航的方法很多,例如GPS、惯性导航、天文导航等[1]。其中基于星敏感器的天文导航方法由于导航精度高、误差不随时间积累等特点成为了空间应用中的有效自主导航手段[2-3]。在影响天文导航精度的因素中,地平的敏感精度是很重要的一点,根据星敏感器敏感地平方式的不同,可分为直接敏感地平和利用星光折射间接敏感地平两种方法[4-5]。
直接敏感地平法受地平仪精度的制约,导航精度较低。利用星光折射间接敏感地平的方法是一种低成本、高精度的自主导航方法。该方法的研究工作可以追溯到20世纪60年代[6-7],1975年由美国海军研究局和美国国防部高级研究计划局共同投资,麻省理工学院Draper实验室对星光折射/星光色散自主导航方案进行了研究和论证,结果表明在一个轨道周期可观测40颗折射星的理想条件下,导航精度可达100 m[8-9]。
星光折射间接敏感地平法精度高且成本低,是一种很有发展前途的导航方法,因此吸引了大量的学者对其进行研究。然而,由于航天实验费用巨大,往往不可能进行实时的星空拍摄,因此目前的折射星导航的研究,大多数都是基础理论的研究,实验验证比较困难。还有极少一部分研究成果是结合星光折射的几何原理和大气折射模型直接计算星光折射角,然后使用星光折射角来研究星光折射导航[10-12]。这种方法直接使用了计算得到的星光折射角,没有对折射星图进行模拟,忽略了环境噪声、星敏感器噪声、星点位置噪声等众多噪声的影响,与真实情况差距较大,因此这些研究成果对于实际应用还有一定的距离。
鉴于此,本文提出了一种折射星的模拟方法,不但能够模拟折射星在星敏感器像平面的位置,而且能够根据实际情况考虑星敏感器噪声、环境噪声的影响,为折射星导航的研究提供了一种更加符合实际情况且操作简单,成本低廉的方法。
1 折射星的选取
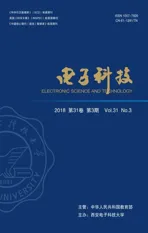
在使用折射星进行导航时,根据平流层的厚度折射高度一般选取20~50 km,即图1中ha=20 km,hb=50 km;假设某恒星星光的方向矢量为s,则由图1得符合下列方程的恒星可以被选为折射星

图1 折射星判断原理图
(1)

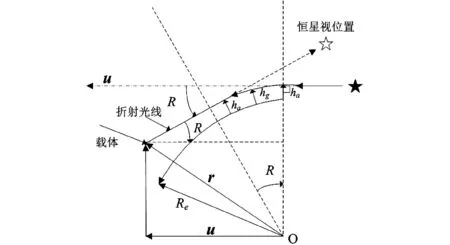
图2 星光折射原理图
若某颗恒星利用式(1)判断为折射星之后,就计算该恒星的星光折射角R;如图2所示,根据折射高度与星光折射角之间的几何关系可得如下方程
(2)
其中,u=|r·u|=|xsx+ysy+zsz|,u=[sxsysz]T为折射前的星光矢量,sx、sy、sz为恒星在天球坐标系的方向矢量,可通过查找星表得到。
同时根据大气折射模型也可以得到折射视高度与星光折射角之间的关系[13]
ha=57.081+2.531e[0.98ln(R)-8.689]-6.44ln(R)
(3)
对于式(2),在进行折射星模拟时可以通过载体的真实轨迹得到载体的位置矢量r,同时从星表中可以得到u,地球半径Re已知,所以在式(2)中只有折射视高度ha与星光折射角R未知;将其与式(3)结合通过解方程组就可以得到星光折射角R。
下一步就是求解折射星视位置的赤经、赤纬。假设折射星视位置的赤经、赤纬为γ和δ,则折射星光在地心赤道坐标系的方向矢量P可以表示为
P=[cosγcosδsinγcosδsinδ]T
(4)
星光折射角为R已经在上一步中得到,则有
P·u=cosR
(5)
同时根据图2中的几何关系得
(6)
将式(5)和式(6)结合通过解方程组就可以得到折射星视位置的赤经γ、赤纬δ。
上述步骤计算得到的折射星是假设星敏感器视场大小为360°时的结果,实际中星敏感器的视场远小于360°,这种情况下上述得到的恒星就不一定被星敏感器捕获到,因此就需要判断上述折射星是否被星敏感器捕捉到。
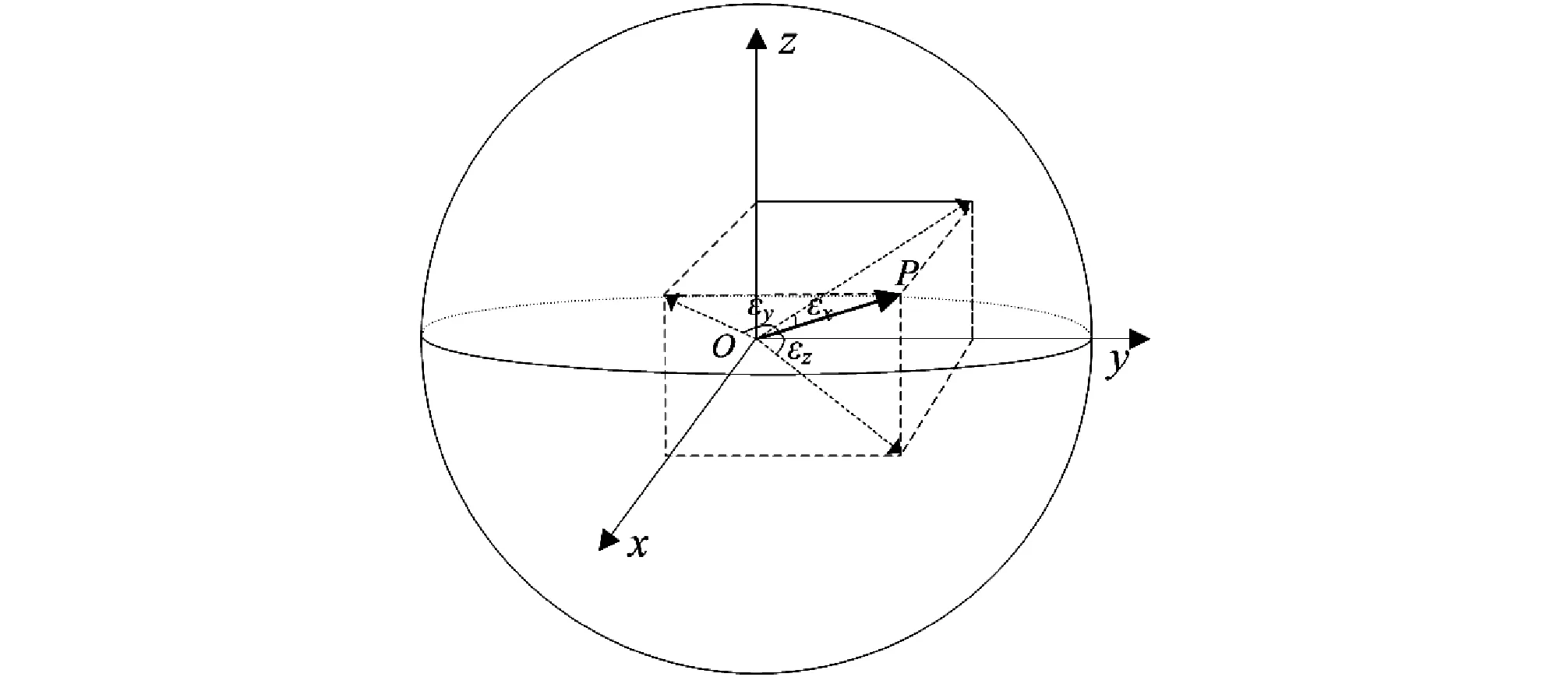
图3 恒星矢量与主轴平面夹角示意图
如图3所示,折射星光矢量P与主轴平面的夹角分别为εx、εy、εz,且有
(7)
根据载体的真实轨迹可得到载体的真实姿态,通过载体与星敏感器的安装矩阵可以得到星敏感器的视轴指向所对应的赤经γ0、赤纬δ0,根据式(7)得到视轴指向与主平面的夹角εx0、εy0、εz0,则符合下述公式的折射星光可以被视场大小为θFOV的星敏感器捕获到[14]
(8)
星敏感器捕获到的折射星计算完毕之后就可以进行星点成像中心计算,并生成模拟折射星图。
2 模拟折射星图的生成
一般将恒星在星敏感器中成像的亮度用灰度表示,恒星的星等越小,对应的亮度越强,相应的灰度值越大,在基本星表中星等的范围是-1~11之间的浮点型数,取0~6星等的恒星,令d为观测星的星等,g为所成像的灰度值,则模拟恒星在像平面的灰度为
g=100+20·(6-d)
(9)
若判断折射星光被星敏感器捕获到后,使用如下公式计算折射星成像中心位置(xs,ys)
(10)
其中,Nx、Ny分别为星敏感器像平面两个方向的像素数目。
对于CCD成像装置,恒星为点目标,像点为CCD相机焦平面上的光学系统点扩散函数。一般而言,光学系统不是理想系统,星像能量分布近似为如下二维高斯分布[15]
(11)
其中,σ代表星点扩散半径表示星点弥散斑的大小,(x, y)为像平面的像元坐标,f(x, y)为像元(x, y)对应的灰度值。
根据星敏感器的参数设定好星点扩散半径、背景灰度和背景噪声后生成的数字星图可表示为
P(x,y)=f(x,y)+B+NB(x,y)+N(x,y)
(12)
其中,B为背景的灰度值,NB(x, y)为背景噪声一般设置为均值为0方差为σB的高斯白噪声。另外除背景噪声外,还有成像器件噪声和散粒噪声等,它们也可以用高斯分布的随机噪声来表示,即N(x, y)也可以设置为均值为0,方差为σN的高斯白噪声。
3 仿真验证
由于真实拍摄星图中星点很小(约3~5个像素),用肉眼分辨比较困难,不适合用来描述折射星识别的过程,因此根据实验结果制作了下图来进行试验验证的说明。实验结果的是根据真实拍摄星图得到的,拍摄该星图的星敏感器参数为星敏感视场为8°×8°,像平面分辨率为1 024×1 024,极限星等为6Mv。图4中所示的拍摄星和模拟星点位置是经过质心定位之后的结果。
图4 星图模拟方法对比示意图
如图4所示,图中只有编号为1、2、3的3颗星为折射星,传统方法由于忽略了环境噪声、星敏感器噪声、星点位置噪声等众多噪声的影响,因此得到的模拟星点位置与真实拍摄星图的星点位置相差像素数目较多,对于编号3的折射星,传统方法由于产生的误差较大,在进行折射星匹配时可能与4号星进行错误匹配,进而会影响到后续导航定位的结果,使得导航误差增大。而本文的模拟方法考虑众多因素的影响,得到的效果较好。图5是两种模拟方法质心定位后与真实折射星位置的误差对比曲线。
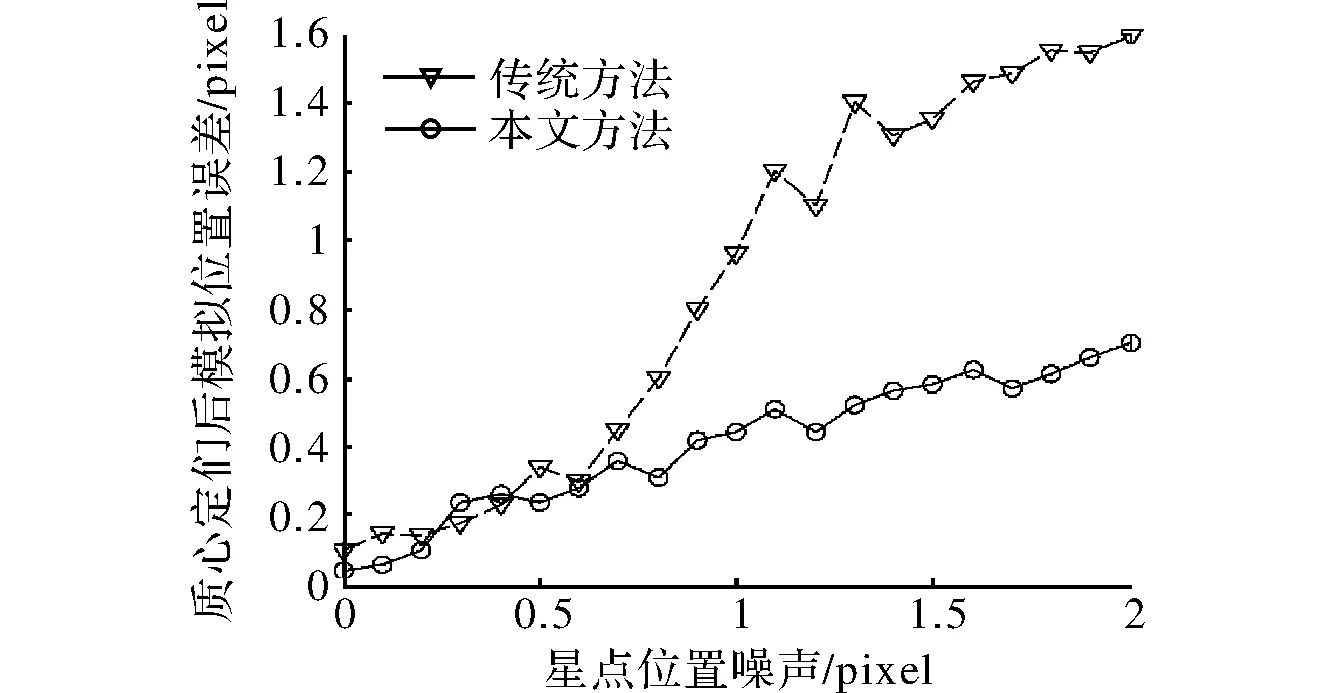
图5 星图模拟位置误差曲线
如图5所示,无论是传统方法还是本文提出的方法,随着星点位置噪声的增加,模拟折射星的位置误差也会相应增加。传统方法的模拟误差会随着星点位置误差的增加快速发散,而本文的方法在星点位置误差为2个像素时,仍然能够将模拟误差控制在1个像素以内。
4 结束语
本文提出了一种折射星的模拟方法,并通过理论分析和仿真结果对该方法进行了验证,验证结果说明该方法不但能够模拟折射星在星敏感器像平面的位置,而且能够根据实际情况考虑星敏感器噪声、环境噪声的影响,为折射星导航的研究提供了一种更加符合实际情况且操作简单、成本低廉的方法。
[1] 李家森,席志红,赵彦青.北斗/INS组合导航中人工鱼群粒子滤波的应用[J].电子科技,2013,26(6):157-161.
[2] 秦洪卫.捷联惯导/星光组合导航技术研究[D]. 哈尔滨:哈尔滨工业大学,2013.
[3] 罗建军.组合导航原理与应用[M].西安:西北工业大学出版社,2012.
[4] 伍雁雄,张新,张继真,等.星光折射自主导航星敏感器及光学系统设计研究[J].光学学报,2015,35(2):1-10.
[5] 王海涌,金光瑞,赵彦武.间接敏感地平星敏感器视场内折射星数的概率分布适用模型[J].光学学报,2013,33(12): 1-6.
[6] Chory M A,Hoffman D P,Lemay J L.Satellite autonomous navigation-status and history[C].Las Vegas,USA:IEEE Transaction on Position, Location and Navigation Symposium,1986.
[7] Savely R T,Cockrell B F,Pines S.Apollo experience reportonboard navigational and alignment software[M].Washington D C:National Aeronautics and Space Administration,1972.
[8] 曾威,崔玉平,李邦清,等.惯性/星光组合导航应用与发展[J].飞航导弹,2011(9):74-79.
[9] Robert Gounley,Robert White,Eliezer Gai. Autonomous satellite navigation by stellar refraction[J].Journal of Guidance,1984(9):129-134.
[10] 王国权,宁书年,金声震,等.卫星自主导航中25~60公里星光大气折射模型研究[J].科技通报, 2005,21(l):107-111.
[11] 李琳琳,孙辉先.基于星敏感器的星光折射卫星自主导航方法研究[J].系统工程与电子技术,2004,26(3):353-357.
[12] 周凤岐,赵黎平,周军.基于星光大气折射的卫星自主轨道确定[J].宇航学报,2002,23(4):20-23.
[13] Wang Xinlong,Ma Shan.A celestial analytic positioning method by stellar horizon atmospheric refraction[J].Chinese Journal of Aeronautics,2009,22(3):293-300.
[14] 全伟,徐梁,宁晓琳.一种基于三正交主轴平面的快速星图模拟方法[J].空间科学学报,2012,32(1):141-146.
[15] 吴峰,朱锡芳,许清泉.星图模拟方法在星敏感器技术研究中的应用[J].常州工学院学报,2013,26(2):1-5.