多功能清洁机器人结构优化 设计与运动分析*
2018-03-07马士伟
马士伟
(烟台汽车工程职业学院,山东 烟台 265500)
0 引言
近年来,随着机械、电子、电力、控制以及计算机等学科的发展,机器人领域也得以快速发展,作为一种智能机械,可代替人工完成各种繁重乏味、危险度高的作业任务,对于高楼玻璃的清洁、室内墙体等高处墙体的清扫,还没有通用的产品,目前国内外对于高楼清洁用的爬壁机器人,主要有吸盘式、车轮式和履带式三种,其中,吸盘式移动速度慢、且仅能跨越很小的障碍;车轮式移动速度快、控制较灵活,但吸附力的稳定维持较困难;履带式爬壁机器人的着地面积大,运行相对平稳,对壁面适应性强,但不易转弯,同时这三种爬壁机器人的跨越障碍能力都很弱[1]。
多功能清洁机器人的研究就是为了克服上述的缺点,结合吸盘式爬壁机器人、多足机器人的特点,设计、制作出结构简捷、运行平稳,吸附能力强,且能够跨越较大障碍、转弯方便,以实现连续作业的机器设备,为高空作业机器人的研究提供一种思路。
多功能清洁机器人在设计、制作过程中,运用机械设计的理论、方法对整体结构进行了初步设计,同时采用舵机、无线传输等技术,利用真空泵、吸盘,结合多足机器人三角步态行走方式,让机器人在玻璃幕墙、室内墙体等垂直运行,并对机器人承载拉力、重力的底板进行了有限元分析、计算,在此基础上选择了舵机、真空泵、吸盘,并制作出了样机,通过样机在玻璃幕墙、室内墙体上进行了实验,得出了相关数据,并对数据进行了分析,为研究提供了基础数据。
多功能清洁机器人预期能够实现跨越障碍、直角转弯等行走方式,并在样机实验的基础上,对机器人的结构进行进一步优化,以期达到更好的效果。通过喷水嘴、清扫机构实现对玻璃幕墙、室内墙体等墙体的清扫,最大限度地代替人工高空作业,提高工作效率,操作简单、方便,可以更加适合复杂的工作环境,使生活更加和谐、便利。
1 整体方案设计与工作原理
1.1 整体方案设计
根据机器人垂直运行的特点及要求,本作品在研究之初,从机器人清洗玻璃与墙体时的行走能力、跨越障碍能力入手,整体方案设计既要满足垂直运行时的稳定性、安全性,又要结构简捷、操作方便。
(1)机器人的步态运行方式。为了方便机器人在室外玻璃、墙体上垂直运行流畅,根据六足机器人的工作原理,采用三角步态式行走[2]。
(2)跨越障碍方式。在进行清扫时,机器人遇上墙角、台阶等较大障碍时,需要顺利通过,实现连续作业,采用可翻折式机构。
(3)吸盘机构。机器人在进行垂直运行时,必须能够牢牢地吸在墙面与玻璃面上,本装置所采用的吸盘机构,由吸盘、气泵、电磁阀等组成,在各零件的相互配合下,使6个腿实现轮换吸附。
(4)清洗机构。清洗机构是机器人的执行部分,本机器人能够实现清洁玻璃与墙面的功能,在清洗玻璃时,考虑玻璃的清洗程度以及节约用水的情况,采用高压水泵、针孔式喷嘴以及毛刷机构。通过高压水、毛刷机构清洁玻璃,使用毛刷机构,清扫墙面。
(5)控制部分[3]。本主板的型号QSC32E,具有高效率带记忆功能,为本作品的核心部件,通过主板控制机器人的伺服舵机、行走机构,以控制机器人的运动状态,同时储存机器人的动作程序。
1.2 结构图及工作原理
为了满足机器人总体设计要解决的问题,其构思设计的总体原理方案,如图1所示。
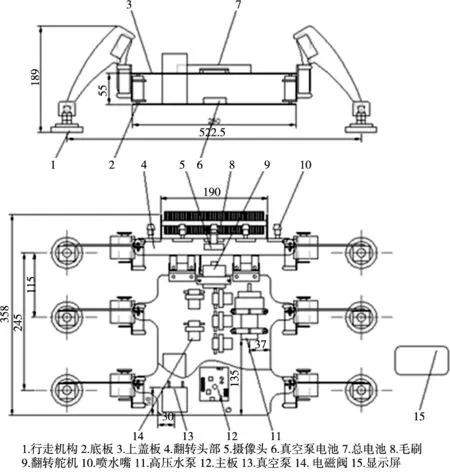
图1 多功能清洁机器人结构图
多功能清洁机器人在机械结构上采用六足机构,工作时,总电池7为机构提供电力,在主板12的控制下,通过真空泵13为行走机构1提供吸力,并在电磁阀14的控制下,实现行走机构1的抬起、吸附,行走机构1采用三角步态式行走方式,通过高压水泵11为喷水嘴10提供高压水,进行初步清洗,再用毛刷8进行二次清理,以保证玻璃的整洁,在进行室内墙体的清扫时,高压水泵11关闭,仅用毛刷8进行清扫,在遇上障碍、墙角时通过翻转舵机9带动翻转头部4实现跨越,通过摄像头5、显示屏15对玻璃、墙体进行实时的监控,保证清扫的安全。
2 主要零部件的设计与分析
2.1 机身
机身为机器人的支撑部件,由底板、盖板、合页、翻转头部组成,底板主要安装腿部机构、各种泵类机构、电磁阀等,盖板上主要安装主板、电池等,为了保证机器的刚度,同时减轻机器的重量,底板与盖板采用2mm厚钢板,翻转头部在合页的作用下可以翻转90°,实现跨越障碍的功能,在翻转头部主要安装针孔式喷嘴、毛刷、摄像头等,底板上的安全绳孔是机器人在进行高楼清洗时为了安全,悬挂安全绳,如图2所示。

1.翻转头部 2.合页 3.上盖板 4.底板 5.安全绳孔
底板起主要的支撑作用,最容易变形处就是与腿部相连接孔的部位,而且机器人采用三脚步态行走方式,在实际运行中,每走一步均为三个孔在受力,由此,对其进行应力分析,以确定机器人在爬行过程中的稳定性[4]。根据受力情况,用Solidworks软件对底板进行三维建模,并进行应力分析,确定出安全系数,如图3所示。
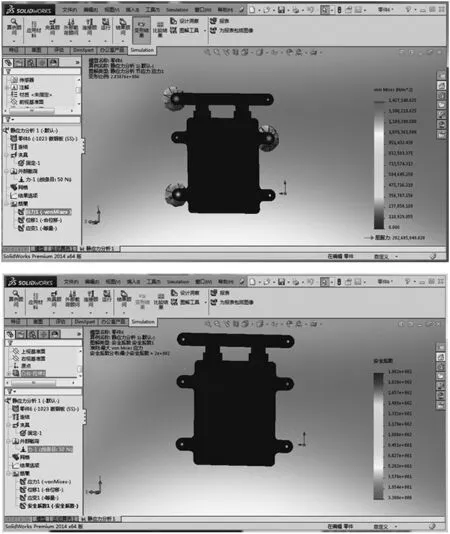
图3 底板的应力云图与安全系数图
底板用普通钢板,厚度为2mm,其屈服应力为282MPa,通过上述应力云图与安全系数图,可以看出,在外力的作用下,底板孔的最大应力为142MPa,最小安全系数为3.3,符合设计要求。
2.2 行走机构
行走机构由吸盘、斜杆、立杆以及3个舵机等组成,其中舵机3控制斜杆2的摆动,舵机1控制立杆5的摆动,舵机2控制腿部机构整体的转动,使腿部机构以三角步态的方式运行,实现机器人的行走,吸盘是本装置垂直运行的关键部件,靠吸盘的吸力让装置牢牢吸附在玻璃或者墙面上,如图4所示。

1.吸盘 2.斜杆 3.舵机1 4.舵机2 5.立杆 6.舵机3
机器人由6个吸盘、4个电磁阀、1个真空泵组成,为了研究方便针对机器人的结构对吸盘、电磁阀进行编号,如图5所示。

图5 机器人吸盘、电磁阀序号图
机器人采用三角步态式行走,其工作原理为:6个吸盘每3个一组进行同时吸气、同时放气,其中1组吸盘由1号、4号、5号吸盘组成,2组吸盘由2号、3号、6号组成,为了更好的控制气路的通断,本结构采用了5个电磁阀,通过电磁阀的控制气路的通断,实现机器人的垂直运行。
吸盘管路系统的连接方式为:真空泵的吸气口通过三通管分别与①号、②号电磁阀一端相连,①号、②号电磁阀的另一端分别通过三通管与1组吸盘、2组吸盘相连,③号、④号电磁阀一端通过三通管分别与吸气管路相连,另一端连接大气,电磁阀⑤通过三通管分别与吸盘1、吸盘2相连,另一端连接大气。吸盘管路系统如图6所示。
机器人的具体动作分为直线运行、转弯运行以及翻转跨越障碍运行,根据运行的方式不同电磁阀的动作顺序不同,其中直线运行与转弯运行时电磁阀的动作相同,翻转跨越障碍动作与之不同。
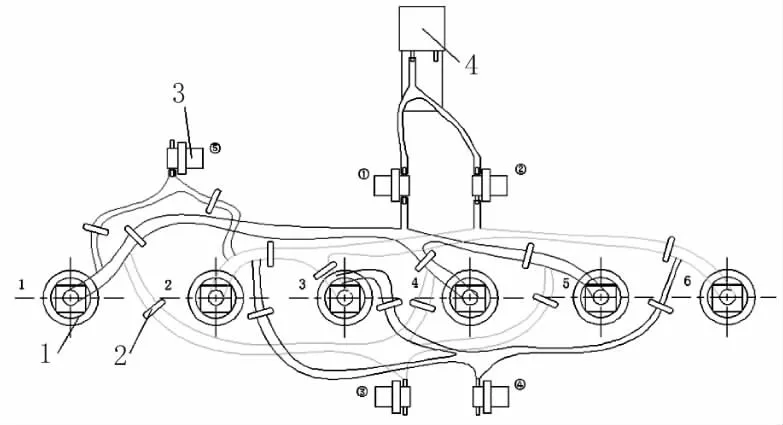
1.吸盘 2.单向阀 3.电磁阀 4.真空泵
(1)直线运行与转弯运行
如图7、图8所示。电磁阀的动作顺序为:真空泵打开,此时电磁阀②打开,电磁阀①、③、④关闭,2组吸盘此时吸附在玻璃或墙面上,1组吸盘完成行走动作,此时电磁②关闭,同时电磁阀④、电磁阀①打开,在电磁阀④的作用下2组吸盘通过大气进气,此时2组吸盘无吸力,并在舵机的作用下从玻璃或者墙面下2组吸盘,同时在电磁阀①的作用下1组吸盘进行吸附[5-7],电磁阀④关闭,2组吸盘完成下一个行走动作,机器人在进行直线运行与转弯运行时电磁阀⑤始终处于关闭状态,如此循环,在直线运行与转弯运行时吸盘抬起的高度为50mm。

图7 直线运动简图
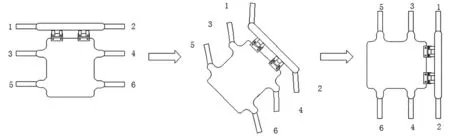
图8 转弯运动简图
(2)翻转跨越障碍运行
如图9所示。在跨越障碍时的首先前面吸盘1与吸盘2抬起,此时吸盘3、4、5、6都牢牢的吸在墙面上,当吸盘1与吸盘2吸在玻璃或者墙面上时,在进行三角步态的行走[8-9]。电磁阀的动作顺序为:当机器人运行遇上90°墙角或者较大障碍无法正常行走时,电磁阀①、②、⑤同时打开,此时吸盘1、2处于自由状态,吸盘3、4、5、6牢牢吸在玻璃或者墙面上,在腿部机构舵机与翻转舵机的控制下,吸盘1、2转过90°,整个头部翻转90°,并落在另一墙面上,此时电磁阀⑤、②关闭,电磁阀①、④打开,此后机器人的行走与直线运行时相同,机器人跨越的障碍最高28cm。
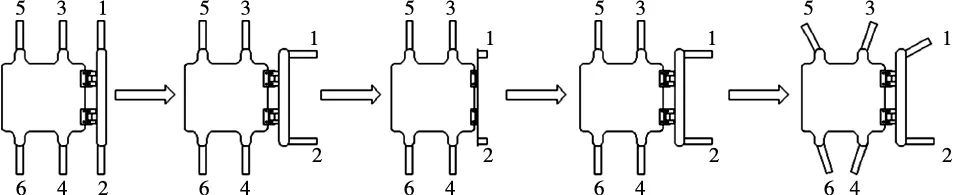
图9 翻转运动简图
2.3 清扫机构
机器人的主要作用是清洁玻璃与清扫墙面,尤其是高处的墙面,针对此作用,机器人在机器的头部设计了喷嘴机构与毛刷机构,对于玻璃灰尘的清除主要靠高压水泵与喷嘴,对于较难清除的灰尘在喷嘴的下方还安装有可以高速旋转的毛刷机构,在进行墙面灰尘的清理时主要靠毛刷机构。
喷嘴机构由喷嘴与高压水泵组成,其中为了节约用水,喷嘴采用针孔式喷嘴,共有5个,间隔尺寸为55mm,每个喷嘴的喷水量大约0.05~0.1ml/s,实现微喷,高压水泵通过多联通水管与之相连,为微喷提供充足的高压,如图10所示。

1.水管 2.喷嘴 3.高压水泵
毛刷机构由电机、大齿轮、小齿轮、毛刷、支架等组成,在电机的带动下通过大齿轮与小齿轮组成的减速机构带动毛刷在支架上旋转,如图11所示。

1.电机 2.大齿轮 3.毛刷 4.小齿轮 5支架
2.4 主板
本主板的型号QSC32E,具有高效率带记忆功能,为本作品的核心部件,通过主板控制机器人的伺服舵机、行走机构,以控制机器人的运动状态,同时储存机器人的动作程序,如图12所示。
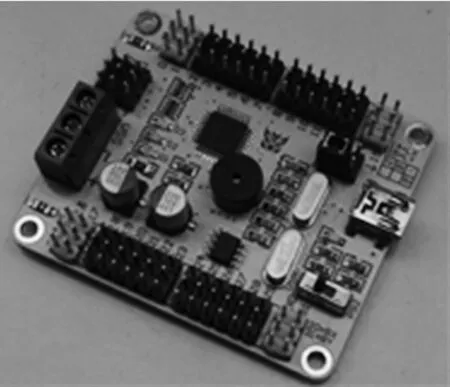
图12 QSC32E主板
3 辅助零件的选用与分析
3.1 蓝牙控制模块
机器人主要靠手柄进行控制,为了增大机器人的通用性,在机器人内部镶嵌了蓝牙模块,可以通过手机来控制,蓝牙控制模块为机器人提供控制信号,以便通过具有蓝牙装置的设备进行操控,多了一种控制方式。
3.2 摄像头系统
摄像头系统由摄像头、显示器等组成,摄像头安装在机器人的前端,能够实时拍摄玻璃的情况,并通过传输器传到显示器上,让操作者能够及时了解玻璃、墙面的情况,能够及时规避危险情况,使操作更加方便、安全[10]。
4 机器人的实验结果与安全分析
4.1 样机实验
根据上述的设计与分析,制作出了机器人的样机,其基本尺寸为522.5mm、宽358mm、高189mm,总重量为5kg,多功能清洁机器人的实物如图13所示,并对样机进行了实验,得出了相关数据。

图13 机器人样机
4.2 实验数据
通过对样机进行实验,得出以下数据,见表1。

表1 实验数据
4.3 安全分析
机器人在垂直运行时,在安全方面最主要的是吸盘能够快速的吸附在玻璃或者墙面上,因此对于吸盘真空度的要求很高,根据设计以及实验测得真空度曲线,如图14所示,从曲线中看出在0.5s左右吸盘的真空度已达-60kPa,在0.8s已接近最大值-85kPa,完全满足机器人的安全行走。
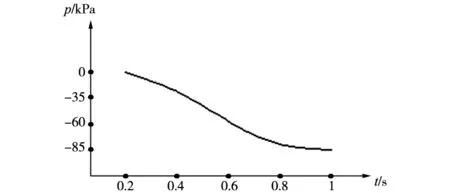
图14 机器人行走吸盘真空度曲线
在安全方面除了真空度实验之外,在机器人的底板上还设计有安全绳孔,在进行高楼玻璃清洗时需要系上安全绳,同时在程序编制时,加上了吸盘抱死程序,当出现状况时,电磁阀①、②同时打开,此时机器人的6个吸盘将全部吸附在玻璃或者墙面上。
4.4 实验结果分析
机器人吸盘的吸力为60kg/个,在垂直运行时,机器人能够快速、牢固的吸附在玻璃或墙体上,保证了运行的安全,并根据机器人行走吸盘真空度曲线图14,可以看出,吸盘在0.5s以内既可以吸附在玻璃或者墙面上,使三角步态运行流畅,保证了机器人行走时的连续性,每个喷嘴喷水量为0.05ml/s,即180ml/h,总喷水量为900 ml/h,比传统的擦洗及相关设备节约了用水,根据行走速度2m/min,毛刷的宽度为192mm,机器人每个小时清扫的面积为23.04m2,提高了效率,翻转机构可以跨越的高度为28cm,可以跨越较大的障碍,在进行90°墙角翻越时,其运行轨迹与理论上的轨迹有一定偏差,分析其主要原因为底板零件上的孔在加工时有一定误差,导致运行轨迹出现偏差,需要进行进一步的误差修正。
5 结论
通过对多功能清洁机器人的研究及样机实验,利用真空泵、吸盘以及多足机器人的三角步态式运行方式,可以实现高楼玻璃幕墙、室内墙体的清扫,机器人采用高压水泵、针孔式喷嘴,实现了微喷,主要靠水泵的高压清除灰尘,克服了传统擦玻璃机器人使用抹布、海绵等需要频繁更换、清洗的缺点,且总出水量为900ml/h,节约了用水;机器人设计了可以90°翻转的头部机构,可以跨越较大障碍,并可以实现墙角处的翻转,克服了传统机器人无法跨越障碍而无法实现连续作业的缺点,同时机器人还安装了摄像头、显示屏等零部件,通过显示屏可以在地面或室内观察清洗的实时状况,提升了安全性。
多功能清洁机器人在结构上采用了底板、盖板分离的结构,这对机器人运行的平稳性还有影响,可以利用目前先进的3D打印技术,打印出机器人的整体机身,这样可以使机器人的整体结构更加紧凑,运行更加平稳。
[1] 崔旭明,孙英飞,何富君. 壁面爬行机器人研究与发展[J].科学技术与工程,2010,10(11):2672-2677.
[2] 杨若霁,陈峰.六足步行机器人腿机构绳传动系统设计与仿真[J].组合机床与自动化加工技术,2012(3):89-93.
[3] 李满宏,张明路,张小俊,等. 基于离散化的六足机器人自由步态规划[J].控制理论与应用,2015,32(4):481-490.
[4] 刘海清.六足仿生机器人结构优化设计及其位姿控制策略研究[D]. 哈尔滨:哈尔滨工业大学,2012.
[5] 徐小云,颜国正,丁国清. 微型六足仿生机器人及其三角步态的研究[J].光学精密工程,2002,10(4):392-396.
[6] 张俊勇,东 方.仿生六足机器人的步态运动控制器设计[J].制造业自动化,2009,31(12):179-181.
[7] 熊翔,颜国正,丁国清,等.基于蛇类生物的仿生变体机器人运动学研究[J].光学精密工程,2001,9(4):330-333.
[8] 庄红超,高海波,邓宗全,等.电驱动重载六足机器人关节转速分析方法[J].机械工程学报,2013,49(23):44-52.
[9] 柳天虹,姜树海.仿生六足机器人稳定性分析与仿真[J].计算机仿真,2013,30(12):360-364.
[10] 施志祥,赵现朝,殷汇乐,等.六足机器人腿部机构控制系统设计[J].计算机技术与发展,2006(10):259.