一种开放式的模块化自重构机器人*
2018-03-07刘策越刘建功
刘策越,刘建功,刘 扬
(中国矿业大学(北京) 机电与信息工程学院,北京 100083)
0 引言
模块化机器人是由一定数量的模块所组成的形态多变的机器人系统。模块化机器人可以为进化机器人技术带来好处,因为模块间可以重新配置以形成特定的几何形态,使得仿真中得到的进化后的机器人形态可以快速在实体机器人上进行测试,从而提高进化实验的效率[1]。
然而在目前现有的模块化机器人平台上[2-11],其控制参数和形态参数的移植过程还很复杂。在控制参数移植方面,由于硬件设计的封闭性以及代码函数库的非标准性,提高了研究人员编程及调试的难度。相比于控制参数的移植,对形态参数的移植涉及到更多方面的工作。①生产制作方面:机器人机械部分的配件如外壳等,需要找厂家进行开模定制,制作周期长且费用昂贵;②设计方面:机械式的连接机构设计复杂,自动连接器的设计增加了模块的能量消耗;③组装方面:机器人零部件、传感器、执行器的组装过程复杂且耗时。
因此,为减少模块化机器人的控制和形态参数从仿真到现实移植的时间成本和耗材成本,本文提出一种新型的开放式的自重构模块化机器人EMERGE (Easy Modular Embodied Robot Generation),取意为易于组建的模块化机器人。首先对模块的自由度及外形、连接机制、控制系统进行了分析设计,然后基于移动任务实验,将仿真中得到的进化后的构型和控制参数移植到实体机器人上进行测试,实验结果表明EMERGE模块具有良好的可靠性和可移植性。
1 模块自由度及外形设计分析
模块的自由度是模块的核心组成部分,它对机器人的运动方式、机械设计安装都会产生影响。例如,增加模块的自由度数量,虽然可以增加模块的运动灵活性和重构性,但这也会使机械设计和运动控制变得更为复杂。为简化模块的结构设计,只设计一个自由度,选取Dynamixel公司的AX-12A舵机及其附属配件框架FP04-F2、舵机底座FP04-F3作为主体器件。在这种情况下,模块的外形及连接面的数量的设计可分为5种类型,如图1所示。

图1 模块的外形及连接面的数量分类示意图
考虑到空间对称性及模块运动的稳定性,类型2与类型3显然是不合适的。类型1具有两个连接面,基于类型1可以组成链式或移动式的自重构模块化机器人,但是无法组成晶体式的构型,这限制了模块的适用范围,所以不采取这种设计。而类型5与类型4相比,连接面的数量多了一个,这极大地增加了构型解空间的规模,扩展了所能装配的机器人构型的种类,从而为模块化机器人解决既定的任务提供了更多的可参考的构型方式。此外,类型5相比于类型4,模块的封闭性和运动稳定性更好。因此选择类型5模块作为设计原型。其外形类似于长方体,结构稳定。连接面的数量为4个。其中的3个连接面与舵机的框架FP04-F2相连,第4个连接面与舵机的底座FP04-F3相连。构型种类满足自重构的特点,可以根据不同的任务组成链式或晶体式的构型方式。
2 模块连接机制的设计分析
2.1 连接面的连接极性设计
连接面的连接极性涉及到不同连接面之间是否可以进行连接,这对机器人的构型方式及数量会产生影响。将EMERGE模块的4个连接面依次命名为face 0,face 1,face 2,face 3。如图2左侧所示。其中,face 1至face 3是连接在框架上,face 0是连接在舵机底座上。基于空间对称性原则以及简单易用的设计理念,将face 0定义为阳型连接面,face 1至face 3定义为阴型连接面。不同极性的连接面可以相互连接,同极性的连接面不可相连。因此模块总是使用face 0与其它模块进行连接。模块的连接极性示意图如图2右侧所示。

图2 模块连接面连接极性示意图
此外,在这种连接面极性的设计下,模块的构型数量也足够丰富,采用文献[12]提出的基于有向树的构型计算方法,EMERGE模块的构型数量与模块数量的关系如表1所示。

表1 模块数量与构型数量的关系
2.2 磁式连接设计
为了实现模块间的快速简单连接,为此设计了磁式的连接机制,如图3所示。在每个连接面上安装有4个材质为NdFeB (neodymium, iron and boron)的圆形磁铁,安装磁铁的圆孔设计有递减斜坡,以便于使用万能胶水加固安装磁铁。同一连接面磁铁的极性都是相同的,磁铁的磁力大小约为10.72N,直径为12 mm。

图3 磁式连接设计
face 0为阳型连接面,face 1, 2, 3为阴型连接面, 因此face 0面上的磁铁的极性与其它三个连接面的磁铁的极性是相反的。为了增强连接面对剪切力的抑制,在阳型连接面上设计有4个凸起的部分,相应的,在阴型连接面上设计有4个凹陷的槽。然而,由于模块化机器人的弯曲运动,可能会超过模块的连接面磁铁的承载力,导致模块断开。通过模块负载实验测试,测得模块的连接面的最大承载力为0.85N·m。基于磁式的连接机制设计,相邻模块可在0.5s内迅速的相连,且没有能量消耗。
2.3 电气连接机制设计
AX-12A舵机设计有电源和数据信号(+11.1V, GND and Data),因此,模块的电气连接机制是基于舵机的电气信号进行设计的,在这种机制下,模块间的通信和电源信号可以通过连接面共享,因此仅需一根三芯电缆线就可以实现对机器人的供电和控制。
每个连接面下,分别安装有PCB电路板,如图4所示。在PCB板的对角线上,设计有4组对称分布的焊盘,每组的焊盘数量是3个,分别对应电源和数据信号(+11.1V, GND and Data),且每组焊盘的电气信号是相同的。在face 0面下所属的PCB板的两组焊盘上,分别焊接有3个弹簧触点(Spring pin),它们从face 0面的凸起部分对应的3个圆孔穿过,可以与其它PCB板的焊盘接触,以便传递电源和数据信号。当然,也可以在4组焊盘上都焊接弹簧触点,但至少需要焊接一组,否则不同模块间不能共享电气信号。阴型连接面下的PCB板的边缘3个焊盘(电源和数据信号)是焊接在一起的,在保证共享信号的同时,也可以加强巩固模块的机械连接。舵机分别通过三芯电缆与face 1、face 0面的PCB板的2.50mm-3p白色插座相连接,共享电源和通信信号。
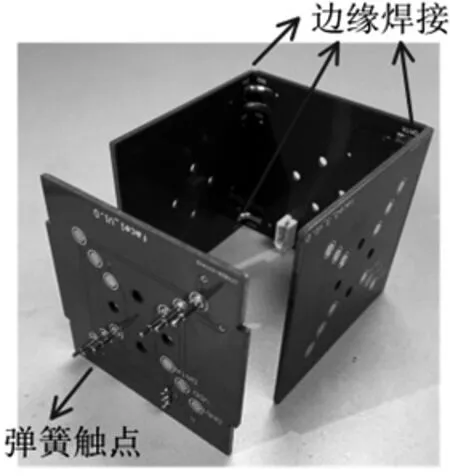
图4 PCB电路板
综上所述,所研制的EMERGE模块及完整的连接机制示意图如图5所示。模块外形为长方体,模块的尺寸是80mm×61mm×55mm,重量是194.1g,具有一个自由度,旋转范围是0°~180°。采用标准的Dynamixel舵机(AX-12A)及其附属配件。设计有4个连接面,其中的三个面与轴杆相连,另一个面与舵机的底盘相连。每个连接面都是由3D打印机制作的,且在每个连接面的正下方安装有一个PCB板,可以有效地实现所有连接面的电源和通信信号(+11.1V, GND and Data)的共享。
EMERGE模块组装、控制大部分采用标准化的器件,标准的器件的选用以及使用3D打印机制作非标准器件,可以加快EMERGE模块的组装过程,减少了组装的时间成本和耗材成本。在所有器件都准备好后,组装一个模块仅需十分钟左右。此外,EMERGE模块的机械设计,完全开源。

图5 EMERGE模块及其连接机制示意图
3 控制系统设计
基于模块的控制简便、硬件开源的控制设计原则,采用集中式的方式控制模块,通过在计算机的USB接口安装一个接口设备USB2AX,用于接收USB端口的指令并将指令转换为Dynamixel总线协议指令传输给舵机。所有挂载在Dynamixel协议下的舵机都有独立的id地址,既可以控制每个舵机的转速和位置,也可以读取舵机的转速、位置等参数信息。EMERGE控制系统框图如图6所示。
AX-12A舵机支持多种编程语言如Java、Python的API应用函数库,用户只需调用相应的封装好的函数,就可以实现对舵机的控制。在Git-hub等代码管理控制平台上,有许多支持多编程语言的开源的API函数库资源,非常方便实用和进行修改。EMERGE模块的硬件电路设计,完全开源。

图6 EMERGE控制系统组成
4 进化设计
为说明EMERGE模块具有良好的可移植性和可靠性,首先在仿真环境中,对由EMERGE模块所构建的机器人的构型和控制参数进行进化,然后将这两种参数移植到实体机器人上进行测试。
本文使用异构模块化机器人进化设计器Edhmor系统[13]和V-REP(Virtual Robot Experimentation Platform)仿真器[14],寻找进化后性能优异的仿真机器人,将其作为实体机器人的对比依据。在本节中,将详细描述进化设计过程,包模块的编码方式、仿真模型的建立以及评估方式。
4.1 编码方式
本文基于有向树,采用直接编码方式表示机器人个体,根节点是初始节点,之后的每一个节点根据节点与节点之间的连接,挂载在父节点之后。编码示意图如图7所示。模块化机器人个体的编码信息储存在一个一维数组Chromosome[5N-3]里,包括模块种类、子节点数量、选取的父节点的连接面、模块方位、以及相位控制参数。

图7 EMERGE编码方式
4.2 仿真模型
机器人的构建和评估是在仿真环境V-REP中进行的,根据EMERGE的基本物理特征,建立其仿真模型,如图8所示。采用正弦函数作为模块的控制函数。见公式(1):
(1)
i表示第i个模块,yi是执行器的角度,t表示仿真时间,φi是相位。设定相位是进化过程唯一改变的控制参数。

图8 EMERGE在V-REP中的仿真模型
4.3 评估方式
本文的进化目标是:在一定时间内找到移动距离最远且模块使用数量较少的模块化机器人。定义的适应度函数为模块化机器人在平面上移动的欧式距离,单位是m,公式(2):
(2)
xm1,ym1和xm2,ym2分别表示模块化机器人的质心在仿真开始时的初始位置和仿真结束时的最终位置,它的计算方式见公式(3):
(3)
n表示模块的数量,mi表示第i个模块质量,xi,yi是第i个模块的坐标。
5 实验
5.1 测试内容
对于EMERGE模块,从以下3个方面,对三种不同的由EMERGE模块所构建的机器人,测试了它们的可移植性和可靠性:①对三种模块化机器人构型的移植测试;②对三种机器人的控制参数的移植测试;③对三种机器人的运动性能的测试。
在引言中指出,可移植性指的是仿真进化后的模块化机器人移植到实体机器人的能力。因此,首先基于平面的移动任务,在仿真环境中对由EMERGE模块组建的机器人进行进化,然后根据适应度函数值,选取3个在各自构型下移动距离最远的机器人进行实验测试。进化的配置参数为:种群数量24,评估时间30s,评估次数20000,模块的最大数量限制为9。
5.2 构形参数移植测试
如图9左侧所示,即为仿真中进化后得到的3个在各自构型下移动距离最远的机器人。然后基于实体EMERGE模块分别构建了它们的构型,如9图右侧所示。经测试,每一种构型的机器人在10s内就可快速完成构建。实验测试结果见表2中的组装耗时所示。构型移植实验表明,EMERGE系统连接机构连接迅速、可靠,具有快速测试不同形态机器人的能力,有效地简化了模块化机器人构型移植的过程。

图9 机器人的构型移植实验
5.3 控制参数移植及运动性能测试
在构型移植后,分别把三个机器人的进化后的控制参数(相位)移植到实体机器人上,在相同的仿真时间(30s)内执行移动任务,测试其运动性能。在地面上放置了一米长的标尺作为参照。
首先基于Python语言,依次将进化后的控制参数写入到舵机提供的的API函数中,完成程序的编写。然后将USB2AX接口的一端与PC机连接,另一端通过三芯电缆线与机器人的任意一个模块连接,最后供电运行,依次对三种机器人进行运动性能测试。仿真与现实的运动实验录像截图如图10所示。实验测试结果如表2所示。

图10 仿真与现实的机器人的运动实验
实验表明,EMERGE模块机械、电气和通讯系统正确,在多种不同机器人形态下运行连续稳定、可靠。此外,仿真的移动距离与实际的移动距离接近,表明控制参数移植性能良好,有效地简化了模块化机器人控制参数的移植过程。

表2 实验测试结果
6 结论
本文提出了一种新型的开放式的模块化机器人EMERGE,模块结构简单,设计有4个连接面,具有一个自由度,外形为长方体的稳定结构;设计了一种磁式的连接机制,可快速、可靠的进行连接,具有快速测试不同机器人形态的能力,且无能量消耗。模块采用标准化的器件进行组装可以减少时间成本,采用3D打印机制作非标准化器件,可以有效降低制作成本。此外,开源的硬件架构使得模块的控制系统简单易用。最后通过移动任务实验证明EMERGE机器人的机械和电气系统工作稳定,表明EMERGE系统具有良好的可移植性和可靠性,为测试不同形态的模块化机器人提供了研究基础。
[1] Stoy K, Brandt D, Christensen D J, et al. Self-reconfigurable robots: An introduction[M]. Cambridge: Mit Press, 2010.
[2] 董航,杜广胜,刘冬,等. 基于遗传算法的码垛机器人关节路径规划[J]. 组合机床与自动化加工技术,2017(5):29-31,35.
[3] Yim M, Duff D G, Roufas K D. Polybot: a modular reconfigurable robot [C]. Proceedings of the IEEE International Conference on Robotics and Automation, San Francisco, CA, USA, 2000: 514-520.
[4] Gilpin K, Kotay K, Rus D, et al. Miche: Modular shape formation by self-disassembly[J]. The International Journal of Robotics Research, 2008, 27(3-4): 345-372.
[5] Mondada F, Guignard A, Bonani M, et al. SWARM-BOT: From concept to implementation [C]. IEEE/RSJ International Conference on Intelligent Robots and Systems, Las Vegas, NV, USA, 2003: 1626-1631.
[6] Murata S, Yoshida E, Kamimura A, et al. M-TRAN: Self-reconfigurable modular robotic system[J]. IEEE/ASME transactions on mechatronics, 2002, 7(4): 431-441.
[7] 赵杰,唐术锋,朱延河,等. 基于万向式关节的模块化自重构机器人[J]. 机器人,2010,32(5):608-613.
[8] J Auerbach, D Aydin, A Maesani,et al. RoboGen: RobotGeneration through Artificial Evolution[M].In Proceedings of the 14 Artificial Life Conference, Alife. e MIT Press, New York, 2014.
[9] A Faina, F Bellas, F Orjales, et al. An evolution friendlymodular architecture to produce feasible robots[J]. Robotics and Autonomous Systems63,2015, 63(P2):195-205.
[10] H Lipson,J B Pollack. Automatic design and manufacture of roboticlifeforms[J]. Nature 2000,406 (6799):974-978.
[11] Stoy K, Brandt D. Efficient enumeration of modular robot configurations and shapes[C]//Intelligent Robots and Systems (IROS), 2013 IEEE/RSJ International Conference on. IEEE, 2013: 4296-4301.
[13] Freese M, Singh S, Ozaki F, et al. Virtual robot experimentation platform v-rep: A versatile 3d robot simulator[C]//International Conference on Simulation, Modeling, and Programming for Autonomous Robots. Springer Berlin Heidelberg, 2010: 51-62.