基于MATLAB/Simulink的采样系统虚拟仿真实验
2018-03-07边敦新王红梅
边敦新,王红梅,季 画
(山东理工大学 电气与电子工程学院,山东 淄博 255049)
随着计算机技术的应用,越来越多的采样系统应用到控制方案中.采样系统异于连续系统之处在于,一是人为引入采样开关实现误差信号的离散化,二是加入保持器实现误差信号的复原,正是因为采样开关和保持器的加入,使采样系统的性能发生了变化.为直观理解采样系统的性能,在采样控制实验系统中,采样保持器由LF398实现,采样周期则由输入MC14538单稳态电路的方波信号进行改变.实验系统可验证零阶保持器的作用及采样周期的变化对系统性能的影响.但实验过程中发现:
(1)由于受硬件电路的限制,实验系统可分析的系统性能不够全面,比如不能单独观察采样开关的加入对系统性能的影响,不能分析一阶保持器对系统性能的影响.
(2)由于受硬件电路不便于改变的制约,实验系统不容易实现较大范围采样周期的改变,不方便实现数字PID控制.
(3)实验中由于受实验设备及操作人员等因素的影响,实验结果不够理想而且实验结果显示以及相互比较不够方便.
受以上条件限制,实验系统达不到全面掌握采样系统性能的教学效果.为了便于更好的理解采样控制系统的性质,本文充分发挥MATLAB/Simulink软件方便、灵活构建仿真系统的优势,逐次分析采样开关、采样周期及保持器对采样系统的影响,通过深入探讨仿真实验结果,直观展示采样系统的理论知识,实现从理论知识到实践知识的转化.
1 采样系统的基本性质
1.1 采样过程的数学描述
信号采样可看作是一个脉冲调制过程[1-2],理想的采样器相当于一个理想的单位脉冲序列发生器,采样后的误差信号可表示为
(1)

在实际采样过程中,与理想采样器不同,每个采样周期内,会有持续时间为τ的闭合.通常τ很小,远远小于采样周期T,故e(t)在τ时间内变化甚微,可近似认为在该采样时间内其数值不变.所以e*(t)可近似视为一个宽度为τ,高度为e(nT)的矩形脉冲序列,即
1(t-nT-τ)]
(2)
式中:[1(t-nT)-1(t-nT-τ)]表示在nT时刻,一个高度为1、宽度为τ的矩形脉冲,可进一步表示为
(3)
由式(3)可见,采样后信号的强度正比于闭合时间τ,如果采样信号e*(t)直接加到后续系统中,为使系统的总增益在采样前后保持不变,则需增加一个增益为1/τ的放大器.如果采样信号经保持器加到后续系统中,则可不考虑脉宽τ对系统增益的影响,可直接按理想采样开关来处理.
特别需要注意,为使采样后信号e*(t)能包含被采样的连续信号e(t)全部信息,采样频率则需满足采样定理:采样频率ωs必须大于或等于连续信号e(t)频谱中所含最高频率ωmax的两倍,而实际应用中采样频率通常为最高频率的5~10倍.
1.2 采样保持器的性能分析
为复现误差信号e(t),系统中需要加入低通滤波器,工程中通常采用零阶或一阶保持器.零阶保持器的传递函数和频率特性[3-5]分别为
(4)
(5)
一阶保持器的传递函数和频率特性分别为
(6)
Gh(jω)=
(7)
从幅频特性看,两种保持器都具有低通滤波特性,但都不是理想的低通滤波器,除允许采样信号的主频分量通过外,还允许部分高频分量通过.从相频特性看,保持器随频率增加产生较大的相位滞后,因此保持器的引入,将造成系统稳定性下降.而一阶保持器与零阶保持器相比,低频时幅值衰减少,更容易保持原信号,但当频率增加时相位滞后也较大[6-7].
2 采样开关对采样系统性能影响的虚拟实验
采样开关的加入,造成信息的缺失,必对系统的控制性能产生影响,而其影响对常规系统和大惯性大滞后系统是有所不同的.
2.1 采样开关对常规系统控制性能的影响

图1 仅加入采样开关的采样控制系统仿真模型Fig.1 Simulation model of the sample system only with switch
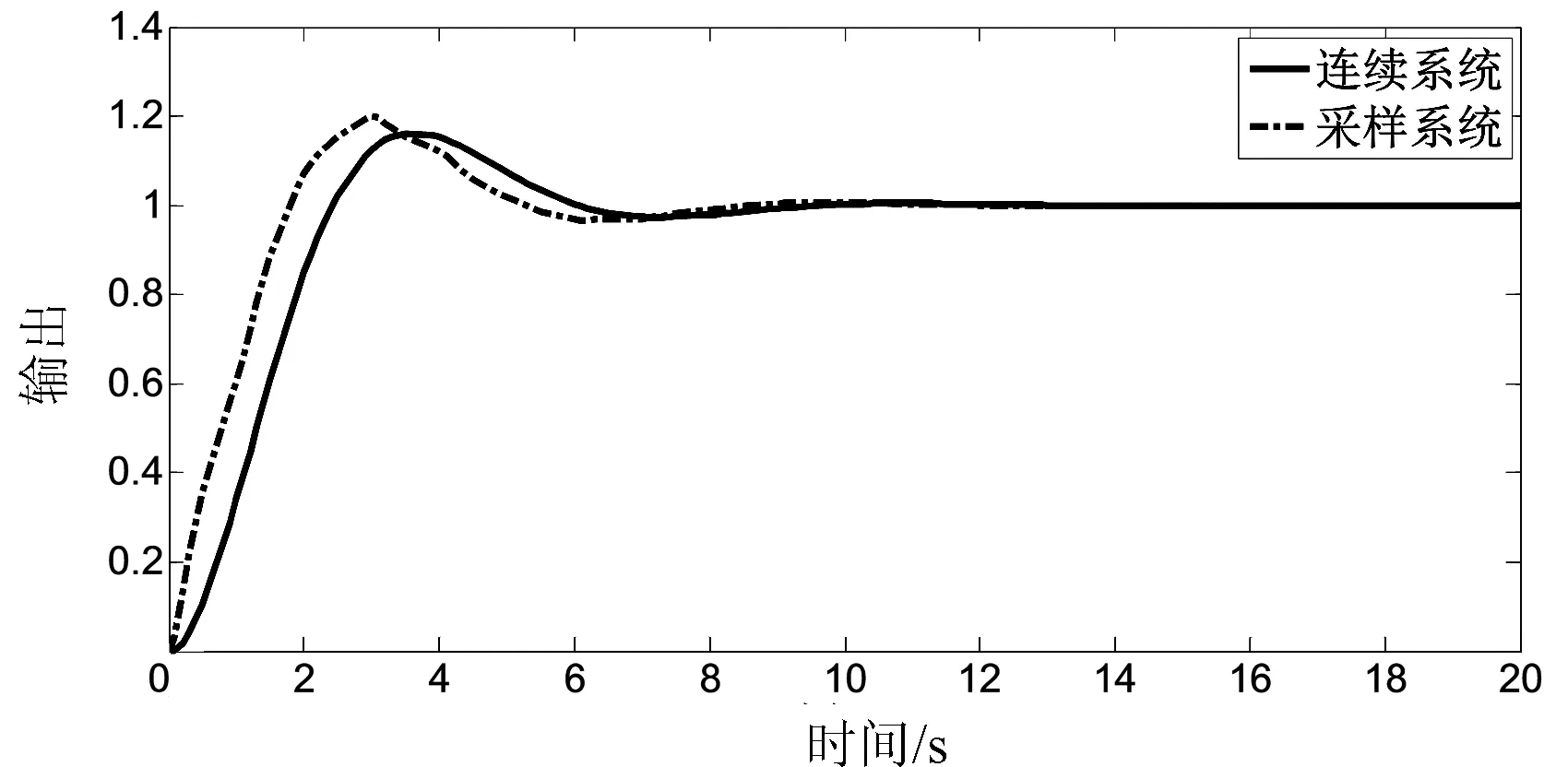
图2 连续系统与仅加入采样开关的采样控制系统仿真结果比较Fig.2 Comparison of the continuous system and the sampling system with switch only
表1 采样前后系统性能指标
Tab.1 System performance indicators before and after sampling
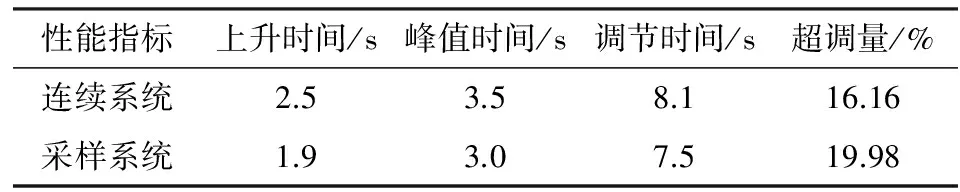
性能指标上升时间/s峰值时间/s调节时间/s超调量/%连续系统2.53.58.116.16采样系统1.93.07.519.98
可见,采样开关的加入可使系统的上升时间、峰值时间、调节时间略有减小,但使超调量有所增大,该仿真结果进一步验证了,一般情况下,采样造成的信息损失会降低系统的稳定程度.
2.2 采样开关对大惯性大滞后系统性能的影响
采样控制系统最早应用于某些具有较大惯性或较大延迟特性的控制系统中,比如工业加热炉温度控制系统[10].工业加热炉其惯性时间常数T比较大,有些可高达千秒以上,滞后时间也大约有数秒至数十秒.在连续控制系统中,为得到较好的动态品质,开环放大系数K只能大大减小,而这将导致稳态误差大大增加,如若增加校正环节,校正装置的时间常数也会很大,实际中难以实现.通常的解决方案是加入采样开关对误差进行采样,实现温度的“调一调,停一停”,这样会取得比较好的控制效果.为验证采样开关的加入对系统性能的影响,根据炉温控制系统结构,建立如图3的simulink仿真模型(此时忽略电机的机电时间常数),取滞后时间为10s.为确保系统的稳定性,取K=0.01.系统仿真结果如图4所示.采样前后系统的性能对比见表2.

图3 炉温控制系统仿真模型Fig.3 Simulation model of the temperature control system

图4 工业炉温度控制阶跃响应曲线Fig.4 Step response of the industrial furnace temperature control
表2 工业炉温度控制性能指标
Tab.2 System performance indicators of the industrial furnace temperature control

性能指标上升时间/s峰值时间/s调节时间/s超调量/%连续系统240362.5567.520.63采样系统450607.58605.83
由图4、表2可见,对于大惯性大滞后系统加入采样开关后,虽上升时间、峰值时间、调节时间均有所增加,但超调量大大减小,从而提高了系统的动态稳定性.
总体可见,采样开关对常规的系统而言是不利的,但对大惯性大滞后系统却又是有益的,所以要充分认识其特点,合理利用.
3 采样周期对采样系统性能影响的虚拟实验
采样周期是采样控制系统的一个重要参数,它对系统的稳定性,系统的PID控制参数,控制品质等产生较大的影响[11-12].如果采样周期取得太小,虽和连续系统相接近,但有可能出现过采样,使得采样信号不能很好反映工况,反而影响控制精度;如果采样周期取得太大,致使系统调节不及时,导致系统性能变差,甚至出现不稳定.如何选择合适的采样周期是采样系统设计的一大难点.
3.1 采样周期对稳定性及控制性能影响
为了反映采样周期T对系统性能的影响,建立了如图5的Simulink仿真系统,其中被控对象的滞后时间为1s.分别设置零阶保持器的采样周期为T=0.01,0.1,0.5,1,5,对系统进行仿真,仿真结果如图6所示.

图5 采样系统仿真模型Fig.5 Simulation model of the sampling system

图6 不同采样周期的采样系统阶跃响应曲线Fig.6 Step responses of the sampling system with different sampling periods
由仿真结果可见,随着采样周期的增加,系统的超调量逐渐增大,振荡次数增加,系统的动态稳定性下降,调节时间也有所延长.特别的,在采样周期比较小时,如采样周期为T=0.01,0.1的仿真结果和连续系统比较相近,尤其T=0.01时已经和连续系统重合.由此可见,采样周期小到一定程度,对系统的影响较小;而在T=5的响应曲线中,由于采样周期取得较大,在非采样时系统的调节作用大大的减弱,致使系统出现比较明显的振荡,控制系统的动态和静态性能大幅下降,可见采样周期过大,对系统的影响非常不利.可以预见,如果采样周期取得更大,系统将会发散,由稳定变为不稳定系统.
3.2 采样周期对大惯性大滞后系统的影响
为了更全面分析采样周期的作用,下面针对大惯性大滞后系统,继续考察其影响.仍然以图3的系统为例,只是将采样开关置换成零阶保持器,分别取其采样周期T=5,10,20,50,100,得到如图7的仿真结果.可见,同常规系统一样,系统仍然随着采样周期的增加,动态、静态性能均有所下降.仿真中发现当采样周期增大到220s时,系统将发散;而当采样周期小到1s时和连续系统已经非常接近.

图7 采样周期对大惯性大滞后系统的性能影响Fig.7 Effect of the sampling period acting on big inertia lag system
3.3 采样周期对PID控制参数的影响
采样控制系统数字PID控制算法计算公式及其传递函数为
(8)



图8 采样周期对PID控制影响仿真模型Fig.8 Simulation model of the sampling period acting on PID control

图9 采样周期对PID控制影响仿真结果对比图Fig.9 Comparison of the PID control with different sampling periods
总体来说,采样周期的合理选择是比较困难的事情,通常可根据被控对象的性能或被控介质,利用经验公式,多次试探后合理选择.

(2)按被控参数选择:流量, 采样周期取1 ~ 5s;压力,取3 ~ 10s;温度, 取15 ~ 20s;成分,取15 ~ 20s.
4 保持器对采样系统性能影响的虚拟实验
由保持器的频率特性可知,保持器在复现信号的同时,由于其相位滞后和幅频衰减会影响系统的稳定性和动态性能,而且这种不利的影响会随频率的增加而愈加明显.下面分别分析保持器对常规系统和大惯性大滞后系统的影响.
4.1 保持器对常规采样系统性能的影响
仿真系统构建时在图5仿真系统的基础上将保持器分别采用Zero-Order Hold模块和First-Order Hold模块,并取采样周期T=1.图10为连续系统和带有采样保持器系统的单位阶跃响应曲线.由图10可见,两种保持器均使上升时间和峰值时间略有减小,系统的调节时间和超调量大大增加,降低了系统的快速性和稳定性.相较于零阶保持器,由于一阶保持器能更好的复现信号,一阶保持器的调节时间和超调量均要小些.发现保持器的复现能力和采样周期有关,当采样周期较大时,保持器的幅频衰减以及相位滞后都较大,会影响系统的稳定性和动态性能,尤其是一阶保持器.把输入信号改为sin(t),采样周期T=3,会得到图11的仿真结果.可见,加入保持器的采样系统幅值降低较多,并且由于一阶保持器的相位滞后较大已经使系统不稳定.

图10 不同保持器下采样系统的阶跃响应曲线Fig.10 Step response of the sampling system with different holds

图11 不同保持器下采样系统的正弦响应曲线Fig.11 Sine response of the sampling system with different holds
4.2 保持器对大惯性大滞后采样系统性能的影响
大惯性大滞后系统继续采用图3所示的系统,仿真中分别设置零阶保持器和一阶保持器的采样周期为20s.图12的单位阶跃响应曲线显示,保持器对大惯性和大滞后系统的影响与常规的系统基本相同,在此就不一一显示结果并陈述.

图12 不同保持器下大惯性大滞后系统的阶跃响应曲线Fig.12 Step response of the big inertia lag system with different holds
5 结束语
本文借助MATLAB/Simulink软件,通过仿真结果的直观展示以及仿真结果的MATLAB计算,分析了采样开关、采样周期、保持器对采样控制系统性能影响.这些影响实质上是由于采样开关和保持器的引入,使闭环脉冲传递函数的极点发生改变,从而影响采样控制系统的动态性能.特别强调的是,采样周期会影响信息的损失程度,影响采样系统的频率特性、稳定性和PID参数等等,一定要合理选择采样周期.该虚拟实验系统能更直观的认知采样系统,更细致的理解采样系统各环节的作用,为设计性能优良的采样系统提供依据.
[1]胡寿松. 自动控制原理[M].5版.北京:科学出版社,2007.
[2]邹伯敏. 自动控制理论[M].北京: 机械工业出版社,2009.
[3]蒋珉,柴干,王宏华,等. 控制系统计算机仿真[M].2版.北京:电子工业出版社,2012.
[4]黄向华. 控制系统仿真[M].北京:北京航空航天大学出版社,2007.
[5]薛定宇.控制系统计算机辅助设计MATLAB语言与应用[M].北京:清华大学出版社,2012.
[6]王春侠. 零阶保持器频率特性的仿真研究[J].电气电子教学学报,2012,34(1):40-42.
[7]喻娅娅,王印松,许鹏春. 数字控制中的保持器与系统稳定性的关系[J].自动化技术与应用, 2004, 23(11):17-19.
[8]刘云龙,王瑞兰,刘丽君,等.基于Matlab仿真的自动控制原理实验教学改革[J].实验室研究与探索,2015,34(6):102-106.
[9]张国云,荣军,丁跃浇,等. MATLAB在自动控制原理教学中的应用[J].电子技术教育,2015(1):71-74.
[10]黎洪生,苗青,周瑞敏.陶瓷窑炉温度控制系统控制算法研究[J].武汉理工大学学报, 2014,36(10):135-139.
[11]蒋红梅. 计算机控制系统中采样周期的确定[J].工业控制计算机,2005,18(11):71-73.
[12]周欣然,陈德池,刘建成. 采样周期对计算机控制系统的影响及其经验选择[J].长沙铁道学院学报,2002,20(3):100-104.