在GPS不完备条件下RFID列车定位研究
2018-03-07黄文轩
黄文轩
(中铁第一勘察设计院集团有限公司,西安 710043)
近年来,现代有轨电车在国内外中小城市迅速速发展起来。现代有轨电车信号系统是保证其安全高效快速运行的主要系统,该系统包括运营调度、正线道岔控制、车辆段联锁、平交道口信号控制、车载等子系统,其中正线道岔控制子系统是信号系统的关键[1]。合理设计正线道岔控制子系统,能够提高整个系统的安全性和效率。在正线道岔控制子系统中,电车位置的检测包含电车的精确位置以及电车在道岔区域的占用和出清两方面。
目前电车的定位有全球定位系统(Global Positining System,GPS)、GALILEO 卫星导航系统等卫星定位手段以及其他辅助的精确定位手段,电车在道岔区域的占用和出清采用轨道电路,计轴器和检测环线等手段[2]。密集楼群对信号产生遮挡,无法实现定位解算,从而导致列车无法定位,即使配合辅助系统实现列车定位,但增加成本过高。为保证定位精度,提高运输效率,同时控制成本,提出采用基于RFID技术进行列车定位。RFID最重要的优点是非接触识别,受环境影响小,识别速度很快,且无源标签成本较低,与其他定位系统比较,RFID定位有很强的发展潜力, 可保证在城市轨道交通中,列车定位安全可靠运行。本文提出基于RFID技术的电车位置检测方法,旨在提高电车定位的精度和正线电车运行的安全性,降低设计施工的成本。
1 现代有轨电车位置检测技术需求
电车位置的检测包含电车精确定位和电车在道岔区域的占用出清判断,精确的位置检测对正线道岔控制子系统的安全性具有重要的作用。根据正线道岔控制逻辑,在道岔区域可分为接近区段、道岔区段和离去区段,当检测到电车进入接近区段时,在车载控制模式下,车载子系统需要向轨旁道岔控制器发送道岔控制命令,为本次电车准备好进路并将其锁闭,防护信号机开放;当检测到电车出清道岔区段并已进入离区区段,该进路解锁,道岔控制器可接收后续电车的道岔控制命令,为后续的电车建立进路[2,3]。由此可见,列车位置的检测在正线道岔控制系统中有着至关重要的意义。
1.1 正线电车精确定位
目前,现代有轨电车正线常用的精确定位有GPS/BDS等卫星定位技术,其定位精度在10 m范围,同时在城市市区内卫星信号较弱,无线电干扰较强,往往容易造成GPS/BDS信号的接收困难或丢失[4]。因此,采用单一的卫星定位手段不能实现电车的连续精确定位,影响有轨电车的运营效率和安全。
采用组合定位在现代有轨电车正线定位中势在必行,本文提出基于RFID技术的电车位置检测,实现在正线道岔区域的组合精确定位。射频识别技术是一种非接触的无线通信系统,通过射频信号将附着于物体上的标签信息传递给阅读器,从而完成对物体的自动识别或追踪定位等应用[4]。在有轨现车定位技术中,电子标签中包含当前标签所在位置的详细信息,通过车载的阅读器读取安装在轨道中间的电子标签信息,从而实现电车的精确定位。
1.2 道岔区域电车的占用出清检测
轨道电路、计轴器和检测环线等设备都能实现电车的占用和出清状态检测,但是都存在一定的缺陷和不足,这些问题限制了电车运营的效率和正线道岔控制子系统的安全性。
轨道电路在现代有轨电车中,由于行人和机动车辆的介入,雨天等环境因素的影响,使得轨道电路分路和调整状态难以划分。同时,轨道电路需要设置送电端和受电端,现场的信号设备数量繁多,对施工和维护造成一定的困难。当电车进入道岔区域后,用轨道继电器的落下无法精确确定电车车头的位置。
对于计轴器,由于现代有轨电车轨面与道路在一个水平面上,安装计轴设备,必然存在锯轨问题,不仅加大施工人员的劳动量,而且降低电车运行的平滑和舒适性;检测环线虽然没有前两者存在的问题,但是其造价较高,安装技术难度也高。
有轨电车正线道岔区段必须对电车占用和出清道岔区段进行安全可靠的检测,将检测到的信息以有线或者无线通信的方式传输给轨旁道岔控制器,由轨旁道岔控制器根据接收到的占用、出清信息进行逻辑运算,实现正线进路的控制。基于RFID电子标签进行电车在轨道区段位置的占用出清检测,不仅可以解决上述各位置检测手段存在的问题,而且由于电子标签体积小,工艺简单,提高了城市轨道交通的美观度。
2 RFID射频识别技术位置检测原理
2.1 RFID系统组成
RFID系统中包含阅读器、电子标签和服务器。射频识别系统的结构框如图1所示。
阅读器利用射频技术对标签进行读写,同时接受来自服务器的控制指令。阅读器是 RFID 系统信息控制和处理中心,其工作频率决定了射频识别系统工作的频率,发射功率决定了系统的有效识别距离[4]。
每个标签具有唯一的编码ID,并包含识别对象的相关信息。标签一般由电子芯片和天线两部分构成。无源标签的处理能力有限,接收到由阅读器发出的能量信号后,能量一部分供给标签内部的电路工作,另一部分由标签调制后反馈阅读器。由于无源标签不能提供能量,其相互之间无法通信。

图1 射频识别系统的结构框图
系统中服务器作用在对数据信息的管理与存储,同时对所辖标签进行读写操作。阅读器通过标准接口建立与计算机通信网络连接,实现通信和数据传输功能。某些情况下,为了降低阅读器计算量,提高系统效率,一般情况下阅读器只负责发送和接收数据,将标签反馈的信息回传服务器做进一步处理。
2.2 RFID系统在有轨电车中定位的基本思路
现代有轨电车系统中,车载阅读器与电子标签之间的距离相对较近,根据电车运营需求,不需要长距离的识别范围。同时,相邻标签之间的距离需求使得系统不需考虑标签信息的碰撞问题。如果选用结构简单,造价低廉的无源标签,频率应当选择超高频(目前我国选用两个频段:840~845 MHz、920~925 MHz),采用电磁反向散射耦合方式。电磁反向散射耦合方式即雷达原理模型,发射出去的电磁波碰到目标后反射,此时反射电磁波携带目标信息返回,依据的是电磁波的空间传播规律[5],其原理如图2所示。
当有轨电车运行至岔区电子标签识别区域内时,由安装在车底部的阅读器发送电磁能量激活第一个电子标签。当电子标签收到电磁能量后,已经写入电子标签EEPROM中的信息通过反射信号反馈给阅读器,该信息包含此时有轨电车的实际位置信息。阅读器将信息简单处理后发送给车载服务器,经车载服务器运算后传递给车载安全计算机,同时以无线的方式发送至运营管理系统。

图2 电磁反向散射耦台方式原理图
2.3 RFID在电车占用和出清检测中的原理
2.3.1 RFID在道岔区域的布置
虽然单一的RFID射频标签只能实现电车的精确定位,但其可靠性得不到保证。同时,单个RFID电子标签无法实现列车在道岔区段的占用和出清检查,因此,必须合理布置RFID电子标签和阅读器,这样既能保证定位的可靠性,又能实现占用和出清的检查。
首先,需要在电车车头位置和车位两部分各安装一个RFID阅读器,这样可以根据两个阅读器对同一标签信息的读取来确定电车确实进入或出清该区域。同时,也可以根据对相同标签读取的时间差和距离差,计算出电车在该道岔区域的平均速度,该速度可以和通过传感器等设备采集计算的速度信息进行比较,从而得出较可靠准确的速度信息,供司机对电车进行控制。
在信号机位置处布置一个无源电子标签,当电车通过该标签时,RFID电子标签向阅读器发送位置信息,车载服务器收到该信息后,判断出电车进入或出清该道岔区段。同时,在进站信号机外方一定距离处设置一个无源电子标签,当采用司机控制模式时,电车进过该标签,司机就可以向道岔控制器以无线的方式发送道岔控制命令,提前为有轨电车准备好进路,等待电车的驶入;同样,在出站信号机位置处也设置无源电子便签。车站每个咽喉处至少设置3个无源电子标签。当道岔区段线路较长时,可以在区段内设置几个电子标签实现电车的精确定位。RFID电子标签布置如图3所示。
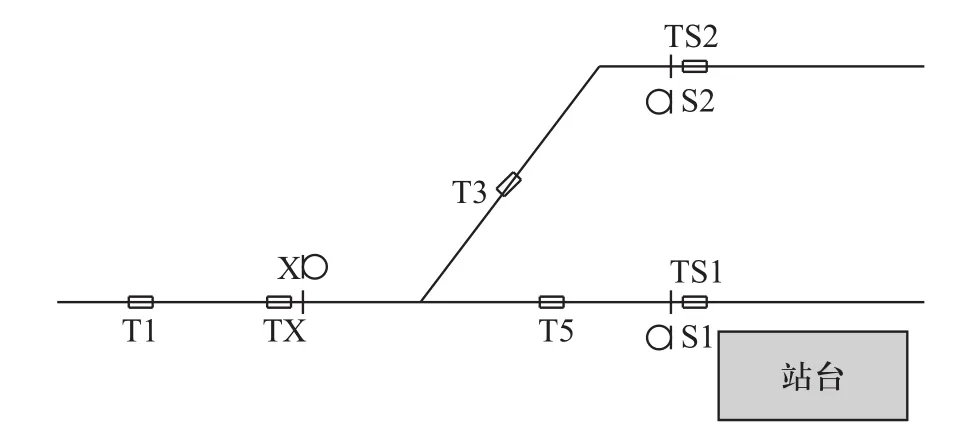
图3 RFID电子标签布置图
2.3.2 RFID电子标签的编号
RFID电子标签编号为线路号与车站编号+电子标签单元编号,具体含义如下。
如01-03-02:01表示有轨电车1号线;03表示车站的编号;02表示该车站的第二个电子标签。
为保证电子标签信息传递的可靠性,可以将单个电子标签设计成电子标签组的方式,当一个电子标签故障,相邻的电子标签可以继续将位置信息传至车载阅读器,实现 “故障-安全”要求。此时在电子标签单元编号中需要区分,在组内用①、②来区分,如 01-03-02-②。
2.3.3 RFID装置实现位置检测的算法
电车运行至电子标签T1的识别范围时,车头RFID车载阅读器发送电磁波并接收电子标签中的位置信息S1和时刻t1,此信息经车载服务器判断处理后,车载安全计算机以无线方式向轨旁道岔控制器发送道岔控制命令。当电车运行至TX电子标签识别范围时,读取其位置信息S2和时刻t2。根据两次接受信息的时间差t=t2-t1,车载安全计算机将计算出该时间范围内的平均运行速度,即根据该速度,计算出电车在道岔区段内任意时刻tn的位置Sn,即Sn=·(tn-t2)+S2。该位置信息在电车经过T3或T5电子标签处将得到校正。
在已知电车长度L和道岔区段长度S的情况下,以图3为例,如果标签没有发生故障,当电车由左向右直股运行,车头和车位阅读器以一定的时间间隔读取到标签TX和TS1的位置信息,此时车载服务器判断出电车出清道岔区段;反之,判断为道岔区段占用。当标签TS1故障,车载服务器将以速度信息为参照计算列车走行的距离(有一定的安全距离),来判断电车对岔区段的占用和出清。假设R表示占用和出清事,那么R可用公式(1)表示:

其中:L表示电车的长度;S表示道岔区段的长度;t安表示安全距离(该距离保证电车以最低速度运营时能在一定的时间段内出清道岔区段)。
3 RFID电子标签中的数据及其编码
3.1 RFID电子标签中的数据
要实现现代有轨电车的定位和道岔区段的占用出清检查,必须在RFID电子标签的ROM中写入线路的相关固定信息,车载服务器通过这些信息来完成指定的功能。RFID电子标签主要的信息数据有:标签所在位置的精确里程;特殊数据(特殊区段的限速值信息);前方区段的长度等信息。
3.2 数据编码
数据编码的作用主要使要传输的线路相关信息尽可能以最佳的性能与传输信道相匹配,也就是将发送的有轨电车线路数据信息变换为适合于给定信道传输特性的频谱结构[5]。
通信系统常见的数据编码方式主要有单极性不归零(Non Return Zero,NRZ)编码;单极性归零(Unipolar RZ)编码;差动双向编码;曼彻斯特(Manchester)编码以及米勒(Miller)编码等。
为了使传输码的频谱中没有直流分量,而且低频分量少,接收端方从传输码中提取定时信息,编译码设备要尽可能简单,设计中采用码型变化丰富的曼彻斯特(Manchester)编码方式。曼彻斯特(Manchester)编码也称为数字双相码。它用一个周期的正负对称方波表示二进制“0”,用其相波形表示二进制“1”。编码规则之一是:“0”码用“01”两位码表示,“1”码用“10”两位码表示。
4 结论
结合有轨电车正线定位需求,将RFID应用于有轨电车的位置检测方法中,解决目前采用的位置检测技术存在的缺陷和不足。本文从RFID系统的频率选择,耦合方式,标签设置,位置检测算法和数据编码方式等方面对有轨电车位置检测方法做了详细的说明,不但降低定位成本,提高有轨电车位置检测的精度,而且能够在一定程度上使有轨电车运营的安全性得到保证。
[1]王灏.现代有轨电车系统研究与实践[M].北京:中国建筑工业出版社,2011.
[2]李晶.现代有轨电车正线道岔控制方案的选择[J].铁道通信信号,2015,51(1): 69-72.
[3]李强.现代有轨电车正线道岔控制系统方案研究[J].电气自动化,2015,37(2):100-102.
[4]轩秀巍.超高频射频识别系统的关键技术研究[D].天津:天津大学,2012.
[5]赵晓春,陈光武,杨厅.基于高压脉冲轨道电路和RFID的有轨电车定位[J].兰州交通大学学报,2016,35(6):95-98.
[6]谢建兵.无线射频识别系统中的防碰撞算法研究[D].南京:南京邮电大学,2012.
[7]房静静.超高频段RFID基带信号处理及相位检测[D].天津:天津大学,2010.
[8]魏峰.远距离射频识别系统关键技术的研究[D].西安:西安电子科技大学,2009.
[9]夏进波.有轨电车正线道岔控制方案的设计研究[J].铁路通信信号工程技术,2016,13(3):70-71.
