用于光阑的旋转型驻波压电作动器
2018-03-06金家楣
刘 坚, 金家楣, 陈 迪, 王 亮
(南京航空航天大学机械结构力学及控制国家重点实验室 南京,210016)
引 言
光阑的作用是调节进入镜头的光通量,使像平面获得适当的照度,从而获得更好的成像效果。在摄像机、显微镜照明系统和激光整形及控制系统中获得广泛应用[1-3]。光阑一般由光阑座、光阑片和活动环组成,通过调节活动环和控制光阑片的开合,使光阑孔径发生变化,达到调节光通量的目的。由于传统调光机构采用电磁电机驱动,通过齿轮减速机构实现光阑调节的功能[4]需要复杂的调速机构,传动链过长不利于高精度控制。精简中间的调速环节是目前的主要任务。
压电作动器是利用逆压电效应激发弹性体的振动,进而通过摩擦传动实现宏观运动的新型电机。与传统电磁电机相比,压电作动器具有结构紧凑、瞬态响应快和运动精度高等特点[5],其直接驱动的方式可最大程度地减少传动环节。近几年,国内外对压电作动器用于驱动光阑等光学设备进行了大量研究。文献[6]设计了一种使用微型压电作动器调节光路开关的调光装置。文献[7-8]研制了用于2D光学扫描系统的压电作动器驱动反光镜的调光系统和综合利用MEMS技术和压电驱动技术,开发了利用S型压电作动器调节像面照度的装置。李晓牛等[9]对旋转型行波超声电机进行改装使之成为中空结构,满足驱动光阑的要求。但是,以上设计没有考虑光阑调光机构长时间工作的要求,使用MEMS技术设计的压电作动器对精度要求十分高,长时间使用必然会出现磨损,这样压电作动器的两相工作模态的频率差凸显,耦合效果变差,影响光学器件的正常工作。
传统压电作动器为了实现驱动转子或者动子运动,一般使用两相模态叠加的方法[10]。长时间工作磨损对两相工作模态产生不同影响,使频率差增大,使用同形振子和单一模态易于缓解这个问题。笔者设计的压电作动器利用两个同形压电振子的相同模态驱动转子转动,并设计有磨损的补偿环节,能够补偿因长时间工作导致的结构预压力变化的问题,适应了光阑长时间工作的要求。
1 结构设计及工作原理
1.1 压电作动器结构设计
图1为笔者设计的旋转型驻波压电作动器的结构示意图。该作动器由压电振子、转子、弹簧、销钉、固定板、螺栓和螺母组成。压电振子由两片压电陶瓷片和的金属弹性体组成,考虑到压电振子的驱动与固定,压电振子激发出三阶纵向振动模态,分别在压电振子的第1、第3节线处粘贴压电陶瓷片,并且在三阶纵向振动模态的第1和第3节线处设置Φ1 mm的通孔用于固定。转子设置在上、下两个压电振子中间,转子与上压电振子的三阶纵向振动模态的波峰波谷处和下压电振子三阶纵振模态的节线处接触。为了补偿压电作动器长时间工作的摩擦磨损,在每个压电振子和固定板之间设置了两个弹簧,使用销钉连接固定板和压电振子。其中,销钉与压电振子之间使用间隙配合,销钉与固定板之间使用过盈配合。用螺钉和螺母对整个压电作动器进行固定和施加预压力。

图1 压电作动器的结构示意图Fig.1 The structure of piezoelectric actuator
1.2 压电作动器工作原理
图2为压电作动器的原理图。对上、下压电振子施加具有π/2时间相位差的A相和B相信号,可以在上、下压电振子上激发出时间相位差为π/2的三阶纵振模态。由于金属弹性体的泊松效应,上、下压电振子对转子的y轴方向压力产生周期性变化。定子对转子摩擦作用力也产生了周期性变化,上、下振子对转子的y轴方向压力和驱动转子的切向摩擦力周期变化如图3所示。转子顺时针和逆时针旋转的力并不相等,一个周期内使转子某个方向转动驱动力所做的功大于使转子向另一个转动驱动力所做的功。在高频驱动电压的激励下,转子会持续进行单个方向运动。调换两相驱动电压的相位,转子能实现反方向旋转运动。

图2 压电作动器原理图Fig.2 Principle diagram of piezoelectric actuator

图3 压电振子对转子的y轴方向力和切向力周期变化图Fig.3 The cycle variation of y axial force and tangential force

图4 压电作动器驱动光阑实验系统Fig.4 The structure of piezoelectric actuator

图5 三阶纵向振动的模态图Fig.5 The 3rd longitudinal vibration mode of stators

图6 厚度与三阶纵振频率的关系Fig.6 Relation between thickness and the frequency of 3rd longitude vibration mode
图4所示为旋转型驻波压电作动器的结构图,整体尺寸为120 mm×100 mm×60 mm。设计的压电作动器的光阑尺寸外径为Φ32.5 mm,内径为Φ18.7 mm,厚度为6 mm。设计用于带动光阑内圈的驱动环外径为Φ40 mm,内径为Φ33 mm,厚度为5.8 mm。考虑到驱动的需要,定子的长度设计为60 mm,宽度为5 mm,通过优化厚度尺寸达到调节频率的目的。笔者使用有限元软件ANSYS15.0进行模态分析,三阶纵振的模态如图5所示。笔者选择的压电振子的厚度为3.5 mm,得到的定子厚度和三阶纵向振动频率之间的关系如图6所示。压电材料选择为PZT-8系列(无锡海鹰公司提供),金属弹性体选用磷青铜。模态分析时选用磷青铜材料,其弹性模量E为113GPa,泊松比μ为0.33,密度ρ为8 800 kg/m3。压电陶瓷片的材料参数如表1所示。

表1 压电陶瓷片的材料参数Tab.1 Material properties of PZT
2 实验研究
2.1 模态实验
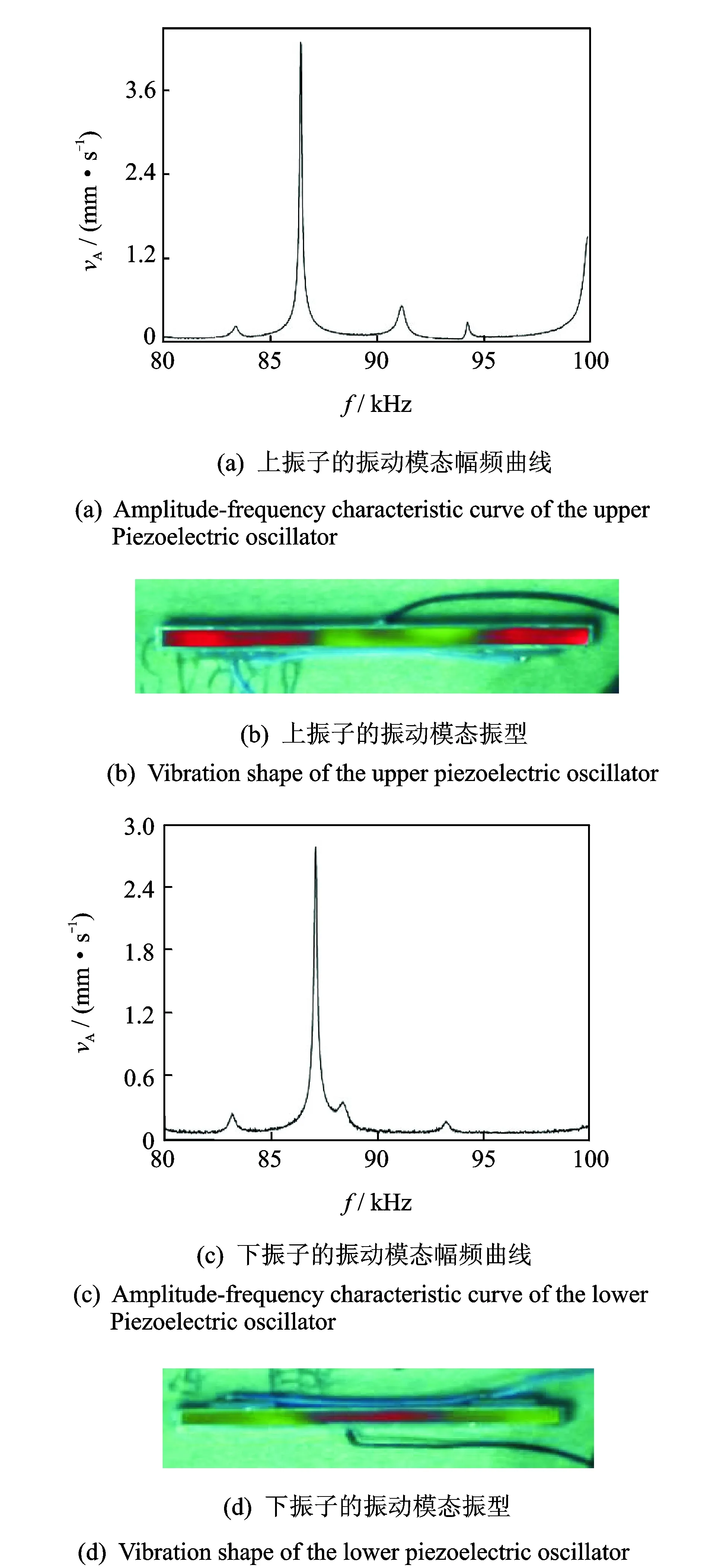
图7 激光多普勒测振仪实测的定子工作模态及振型Fig.7 Operating model's frequency and vibration type
采用德国Polytec公司生产的PSV300F-B型高频激光扫描测振系统对上、下压电振子进行模态实验,结果如图7和表2所示。图7中,vA为速度振幅。理论计算值与实验结果对比如表3所示。从实验结果可知:a. 实际测得的三阶纵向振动的频率在设计的工作频率附近,其振型与设计所选择的工作模态的振型一致,并且在100Vp-p电压定频激励下分别测得上、下压电振子三阶纵振模态y轴的振幅为300 nm和250 nm;b. 图7(a)和图7(c)所示的幅频曲线只有一个峰值,没有出现其他近频的峰值。由于压电作动器工作在三阶纵向振动模态,三阶纵向振动模态周围没有近频的谐振峰,说明其他的振动模态对压电作动器工作没有干扰[11]。

表2 压电振子模态实验结果Tab.2 The modal testing results of piezoelectric oscillator
表3压电振子ANSYS计算结果与模态实验结果对比
Tab.3Comparisonbetweenpiezoelectricoscillator′stheoreticalresultsandmodeltestingresults

自由边界条件上振子的共振频率/kHz下振子的共振频率/kHzANSYS计算结果88.80288.802模态实验结果86.42187.094频率差2.38117.09误差率/%2.751.96
2.2 频率-速度特征曲线
通过调节螺母,伸长或者压缩弹簧对压电作动器的预压力为8 N,固定驱动电压为300 Vp-p,调节驱动电源的频率(86.092kHz~86.795kHz)。A,B两相驱动电压相位差为90°时,压电作动器实现顺时针旋转。两相相位差为-90°时,压电作动器实现逆时针旋转。使用非接触式的激光传感器(日本基恩士公司的LH-H020)测得转子的旋转速度,得到频率-速度的关系曲线如图8所示。可以看出:频率在86.095 kHz~86.795 kHz之间能够实现顺时针旋转;频率在86.435 kHz~86.975 kHz之间能够实现逆时针旋转。其中,当频率为86.695 kHz时,顺时针转速最大,达到68.51rad/min;当频率为86.555 kHz时,逆时针转速最大,为51.61rad/min。由此可以看出,压电作动器在压电振子的共振频率周围转速达到最大,远离共振频率,旋速下降。对比上、下振子的共振频率(上振子为86.421 kHz,下振子为87.094 kHz)可以看出,顺时针的最佳驱动频率更接近于下振子的共振频率,可以认为顺时针运动状态更多的由下振子决定。同理可知,逆时针运动状态更多的由下振子决定。

图8 频率-速度特性曲线Fig.8 Characteristic curve of frequency-rotation speed

图9 预压力-速度特征曲线Fig.9 Characteristic curve of pre-load-rotation speed
2.3 预压力-速度特性曲线
调节驱动电压为300Vp-p,分别调节驱动电压频率为86.695 kHz和86.55 kHz(频率-速度实验时获得的最佳顺时针和逆时针驱动频率)。调节螺母改变对压电振子的预压力,测得压电作动器的转度,得到预压力与转速特征曲线,如图9所示。可以看出,预压力对压电作动器的运行有很大的影响[12]。在预压力低于2N或者高于10N时,压电作动器停止转动。在预压力为7.2N时,顺时针旋转速度达到最大,为56.24 rad/min;当预压力为8.6 N时,逆时针旋转速度达到最大,为45.95rad/min。可见,压电作动器可以在7.2~8.5N的预压力下获得较好的运行状态。
2.4 电压-速度特征曲线
如图10所示,调节预压力为8 N,在驱动电压频率为86.695 kHz和86.555 kHz时,改变驱动电压值(200 Vp-p~400 Vp-p),分别测得压电作动器顺时针和逆时针转速。可以看出:当电压小于200 Vp-p时,顺时针和逆时针转速很小;随着驱动电压升高,顺时针和逆时针的转速基本呈线性增加,其中顺时针电压-速度曲线的斜率比逆时针的大;在电压为400 Vp-p时,顺、逆时针转速达到最大,顺时针为75.36 rad/min,逆时针为62.80 rad/min。实验表明,作动器的电压与速度基本呈线性关系,作动器运行平稳,取得了良好效果。

图10 电压-速度特性曲线Fig.10 Characteristic curve of voltage-rotation speed
2.5 位移分辨率曲线
图11为旋转型压电作动器的分辨率结果。可以看出,当电压为400 Vp-p时,旋转型压电作动器的分辨率可以达到0.34 mrad,这使得旋转型压电作动器满足光学仪器的高精度要求。

图11 位移分辨率实验结果Fig.11 Resolution of piezoelectric actuator
3 结束语
基于光阑和压电作动器的特点,设计和制造了一种新型的旋转型驻波压电作动器。该压电作动器使用两个同形的压电振子激发出相同的振动模态并驱动光阑转动,具有结构简单、响应快速、运行平稳和精度高的特点,易于缓解由于磨损造成的工作频率差增大的问题。实验发现:压电作动器的速度-电压特性具有良好的线性关系;当驱动电压为400 Vp-p时,顺时针和逆时针转速分别为75.36 rad/min和62.80 rad/min,旋转型压电作动器的精度可以达到0.34mrad,满足光阑对速度和精度的要求。这表明该新型旋转型驻波压电作动器可以用于光阑的驱动与控制。
[1] George N, Morris G M. Diffraction by serrated aperture[J]. Journal of the Optical Society of America, 1980, 70(1): 6-17.
[2] Kim Y, Grebel H, Jaggard D L. Diffraction by fractally serrated apertures[J]. Journal of the Optical Society of America, 1991, 81(1): 20-26.
[3] 谢端,高福华,胡东霞,等.锯齿形衍射光阑的优化设计与制作[J].四川大学学报:自然科学版,2009, 46(3):733-737.
Xie Duan, Gao Fuhua, Hu Dongxia, et al. Optimization and manufacture of serrated diffractive aperture[J]. Journal of Shichuan University: Natural Science Edition, 2009, 46(3): 733-737. (in Chinese)
[4] 董莉莉,金宏.采用可变光阑的自动调焦系统的稳定性分析[J]. 光学精密工程,1999, 7(1): 100-104.
Dong Lili, Jin Hong. The stabilization analysis of automatically adjustable optical-intensity system using iris diaphragm[J] . Optics and Precision Engineering, 1991, 7(1): 100-104 . (in Chinese)
[5] Zhao Chunsheng. Ultrasonic motors technologies and applications[M]. Beijing: Scientific Press, 1997: 6-10.
[6] Oohira F, Iwase M, Matsui T, et al. Self-hold and precisely controllable optical cross-connect switches using ultrasonic micro motors[J]. IEEE Journal of Selected Topics in Quantum Electronics, 2004, 10(3): 551-557.
[7] Koh K H, Kobashi T,Xie J, et al. Novel piezoelectric actuation mechanism for a gimbal-less mirror in 2D raster scanning applications[J]. Journal of Micromechanics & Microengineering, 2011, 21(7): 75001-75009.
[8] Lee C. Koh K H, Kobashi T. A 2-D MEMS scanning mirror based on dynamic mixed mode excitation of a piezoelectric PZT thin film S-shaped actuator[J]. Optics Express, 2011,19(15):13812-13824.
[9] 李晓牛,周盛强.一种光阑用螺纹式空心超声电机[J]. 振动、测试与诊断,2013, 33(S2):161-164.
Li Xiaoniu, Zhou Shengqiang. Ultrasonic motor connected by screw for aperture[J]. Journal of Vibration, Measurement & Diagnosis, 2013, 33(S2):161-164. (in Chinese)
[10] 王金鹏,金家楣,赵淳生.用于精密定位平台的直线超声电机的异步并联[J]. 光学精密工程,2014, 19(11):2693-2702.
Wang Jinpeng, Jin Jiamei, Zhao Chunsheng. Asynchronous bundling of linear ultrasonic motor for precision positioning stage[J] . Optics and Precision Engineering, 2014, 19(11): 2693-2702 . (in Chinese)
[11] 陈乾伟, 鞠全勇, 黄卫清, 等. 工作模态控制解耦的塔形直线超声电机[J]. 振动、测试与诊断, 2015, 35(1):107-111.
Chen Qianwei, Ju Quanyong, Huang Weiqing, et al. A modal-control-decoupling linear ultrasonic motor with a tower-type stator[J]. Journal of Vibration, Measurement & Diagnosis, 2015, 35(1):107-111. (in Chinese)
[12] 王光庆,沈润杰,郭吉丰. 预压力对超声波电机特性的影响研究[J].浙江大学学报: 工科版, 2007, 41(3): 436-440.
Wang Guangqing, Shen Runjie, Guo Jifeng. Researches on effects to ultrasonic motor's performance of preload[J]. Journal of Zhejiang University: Engineering Science, 2007, 41(3): 436-440 . (in Chinese)