跟踪状态下射频隐身功率实时控制方法*
2018-03-06高智敏周中良刘宏强
高智敏,周中良,潘 勃,刘宏强,赵 彬
(空军工程大学航空航天工程学院,西安 710038)
0 引言
在日益复杂的电子侦查环境下,提高战斗机的射频隐身性能一直是研究的重点。无源探测系统具有作用距离远、不发射电磁波、隐蔽性好的特点,对机载雷达构成了极大的威胁[1-2]。开展基于射频隐身的机载雷达功率控制的研究,有利于进一步提高机载雷达的射频隐身能力,可以减小敌方无源探测系统的作用距离和跟踪制导精度[3]。
射频隐身的策略主要是减少有源和无源的目标特性,其中有源目标特性的缩减依赖于辐射功率和辐射时间,文献[4]提出了跟踪状态下雷达消耗的最小功率和跟踪采样周期的计算方法,从功率管理实现低截获的目的,但未对此法进行寻优。随后文献[5]提出了最小功率策略,使用最大驻留时间通过控制雷达发射机峰值功率,使得截获接收机收到的辐射功率低于其灵敏度,但是这种策略主要针对灵敏度比较低的截获接收机,现实中战机的灵敏度都比较高。文献[6]确立了功率分级原则,提出一种改进的粒子群多目标优化算法自适应控制辐射功率,但是粒子群算法的收敛时间长,随着目标的增多可靠性变弱。文献[7]提出了评价飞机射频隐身性能表征参量的方法,给出了机载雷达的射频隐身设计方法。文献[8]提出了射频隐身的数据链功率控制方法,以信息交互的手段实现实时控制,局限于数据链双方位置信息能实时获得,故此方法的实用性欠佳。
本文从控制雷达辐射功率策略入手,首先以降低截获概率为射频隐身控制指标,建立低截获率控制模型,并通过控制辐射功率和照射时间,得到了在单目标和多目标不同跟踪状态下的辐射功率与照射时间的实时控制方法。文中给出了分析方法的原理与具体步骤,最后用仿真实验验证了所提方法的准确性。
1 原理分析
根据雷达方程,在一定的虚警概率Pfa与探测概率PD下,以功率Pt工作时,雷达探测距离RR;
其中,PRmin为雷达接收机输入端检波测回波信号所需的最小功率;σ为目标的雷达散射截面积(RCS);为雷达工作波长;Pt为辐射脉冲的峰值功率,为雷达工作波长,Gti为在电磁无源探测系统接收机方向上雷达的发射天线增益,Gir为在雷达方向上电磁无源探测系统接收机的接收天线增益,GRP为雷达接收机处理器净增益[9]。该雷达信号被无源探测系统截获距离为:
式中:RI为雷达与电磁无源探测系统之间的距离,GIP为电磁无源探测系统接收机理器净增益。
1.1 临界截获原理
假定目标的RCS已知并且为一定值时,雷达以峰值功率Ptmax照射目标时,雷达的可探测距离为RRmax,此时截获距离为RImax。为了表征机载雷达探测距离和截获接收机截获距离之间的关系,根据Schleher提出的截获因子概念,可得:
当收发一体的机载火控雷达在跟踪目标时,设定目标处在雷达波束主瓣内,则Gti=Gir,并将式(2)、式(4)代入上式可得:
当截获因子α=1时,RRmax=RImax,雷达处于临界隐身状态,称此时的距离为临界隐身距离RLD,满足
峰值功率Pt越低,探测距离与截获距离不同程度的都变小,从式(6)可知此时α的值也变小,隐身性能变好。通过实时控制雷达辐射功率Pt就能够实现雷达被低截获的目的。
1.2 雷达低截获概率模型
截获问题可以通过重复的独立试验模拟,每个试验有两种可能结果:截获或未截获。假设进行N次仿真实验,第i次成功截获目标,记为yi=1,截获失败记为yi=0。目标截获结果可以用一个0-1二值变量yi来表示。雷达目标截获概率试验可以认为是目标的探测结果服从二项分布中的0-1分布。
雷达探测目标和截获目标是通过多次照射目标实现的,单次辐射造成截获概率很小,而机载雷达要探测目标,跟踪目标直至实现其作战目的为止,雷达需要多次照射,随着照射次数增加,可以用泊松分布近似表征二项式分布:
式中,l=np,随机变量k表示截获次数,截获概率就是一次或多次截获发生的可能性,可表示为:
假定截获接收机频率对准雷达发射频率的概率为PF,截获接收机探测到雷达发射机波束的概率为PD,则截获概率模型为:
其中,文献[9]给出了一个很好的探测概率模型
则截获概率为:
式中:AF为雷达波束覆盖面积(km2);DI为每平方千米面积上截获接收机的密度;Tor截获接收机搜索时间;T1发射机对截获接受机的照射时间。
雷达照射到目标时,会收到若干反射回来脉冲,通过把目标在单次照射中返回的所有脉冲回波积累起来,能够提高雷达的信噪比[10]。雷达接收单个脉冲的信噪比为SNRr,对于理想的相干积累,n个脉冲得到的信噪比定义为SNRR,雷达波束驻留时间为TOT,脉冲重复周期为Tr则有:
将式(1)、式(2)代入上式可得:
发射机的驻留时间须小于照射目标的时间,由于雷达的相干积累时间受所选距离跟踪波门及目标的运动特性限制,所以雷达的驻留时间也应该满足:
其中,0为脉冲宽度,v为目标相对运动速度。
雷达探测目标时,通过侦收雷达回波,即二次回波,从而得到目标的特征信息,每个环节缺一不可。在这一过程中,必须保证雷达发射功率不小于其接收机灵敏度,不大于敌方雷达接收机的灵敏度,才能使其处于不断的猜测中,不能有效地截获雷达信号,实现雷达被低截获的目标。需实时控制雷达的辐射功率控制,故建立的雷达低截获概率模型为:
2 雷达辐射功率实时控制模型
跟踪是指跟踪传感器在空域中一段时间内连续不断观测目标的过程,雷达是目前目标跟踪的主要传感器,目标上装备了截获接收机之后对雷达的辐射很敏感,只要截获此中辐射方式,目标就会采用机动脱离、电子战等方式破坏雷达的持续跟踪,因此,在雷达跟踪目标时有必要采用灵活的功率控制方式,以降低被截获的概率[10]。
本文假设目标雷达的截获接收机的灵敏度、散射截面等先验信息已知,机载雷达利用目标反射回来的雷达信号,截获出目标雷达的距离、方位角、速度等信息,从而准确地掌握目标的动态,利用解算出的雷达与目标的距离[12],得出与临界距离的差值,根据式(1)中雷达距离与辐射功率的关系,可以实时解算出下一时刻功率的变化值,进而形成功率控制因子,通过实时改变发射机的辐射功率,实现对功率的控制,促使目标雷达的截获接收机不能有效地截获雷达信号,处于不断的猜测中,使其无法判断出机载雷达相关信息,这样能有效降低截获概率并提高战机的生存能力。
2.1 单目标跟踪时的功率实时控制方法
设定雷达辐射间隔为Tr,雷达在照射过程中的损耗非常小,可以忽略不计,从对目标的搜索状态转入跟踪状态时,用时为t(为研究方便一般取t=0),经过时间Tg跟踪结束。
雷达以功率Pt照射目标,根据目标反射回来的雷达波信息解算出目标的高度、角度等态势信息,根据雷达接收机确定出两者的实际距离,与雷达上一辐射间隔测出的距离做差,将结果代入式(1)从而解算出功率变化值,进而得到功率控制指令,指导下一次雷达辐射功率的变化,使每个辐射周期内的雷达照射功率处于迭变中,致使目标截获接收机处于不能得到有效的信息,不处于不断的猜测中,猜测就等同于未截获,从而降低被截获的可能性,具体流程如图1所示。
实时控制步骤:
步骤1:雷达以间隔Tr最大功率Ptmax辐射,目标雷达反射信号的接收;
步骤2:根据反射信号功率与雷达方程,解算出与目标的实际距离Ri,进而得到与临界距离的差值ΔRi;
步骤3:利用雷达方程,由距离的差值ΔRi,解算出功率的变化值,形成功率控制信号;
步骤5:返回步骤2,继续自适应选择辐射功率,直至跟踪结束。
2.2 多目标跟踪时的功率实时控制方法
多目标跟踪时的功率控制方法是在单目标跟踪的基础上实现的,依据目标反射的回波从而确定目标与雷达的实际距离,在先敌发现,先敌摧毁的现代化作战需求下,假定距离越近对己方的威胁越大,从而依据对己方的威胁程度选择优先跟踪的目标,但由于随着雷达探测目标增多时,其被截获的可能性也随之大大提高。多目标跟踪针对多个目标的几何中心进行跟踪,在单目标跟踪的基础上必须对雷达的照射时间进行合理的分配,从而降低截获概率。设雷达探测到M个目标为目标与雷达的距离,由于距离的不同所构成的威胁也就不同,设定威胁因子为,其中,值越大则表示目标对雷达构成的威胁程度越大,此时机载雷达被多目标截获模型为:
设在雷达一次扫描中接收到M个有效回波,则有
则有:
雷达与目标中心的距离为
多目标跟踪截获概率与照射目标的时间有关,合理分配时间资源,可以避免照射时间过长造成的高截获概率,为此建立如下时间分配方法:
1)定义雷达最小跟踪间隔时间Ttmin,针对目标的跟踪间隔时间Tti(i=1,2,…,N)都取为Ttmin的整数倍,Lm值较大的目标跟踪间隔应适当增大。Ttmin的取值以满足对多目标跟踪的可靠性和连续性为准则;
2)最小跟踪间隔时间Ttmin中包含 N个时间单元tp,其中M个时间单元用于对m个目标的跟踪,其余的Ns个时间单元用于搜索(单元是指雷达最小的跟踪间隔)即有如下关系,;
3)由于时间资源有限,能够同时跟踪的目标数是有限的,最大跟踪目标数,同时跟踪目标数越大,用于搜索的时间越小。
3 仿真结果及分析
设定敌我双方在10 000 m高空,飞行的速度分别为v1=0.5 m,v2=0.4 m,我机先发现目标机为某型号机,在距其250 km的位置由西向东飞行,我机对其实施跟踪打击具体的仿真参数设置如下页表1所示。
下页图3~图6给出了在两种不同跟踪状态下的仿真结果。在虚警概率分别为10-6与10-8时,图3、图5与图4、图6分别比较可以看出,采用传统的最小功率法,而且功率恒定照射时间固定时,会获得较高的截获概率;而本文采用的单目标跟踪实时控制辐射功率方法,通过实时控制功率的变化,使目标无法有效截获雷达信息,从而降低了截获概率,提高了雷达的隐身性能。

表1 仿真参数设置
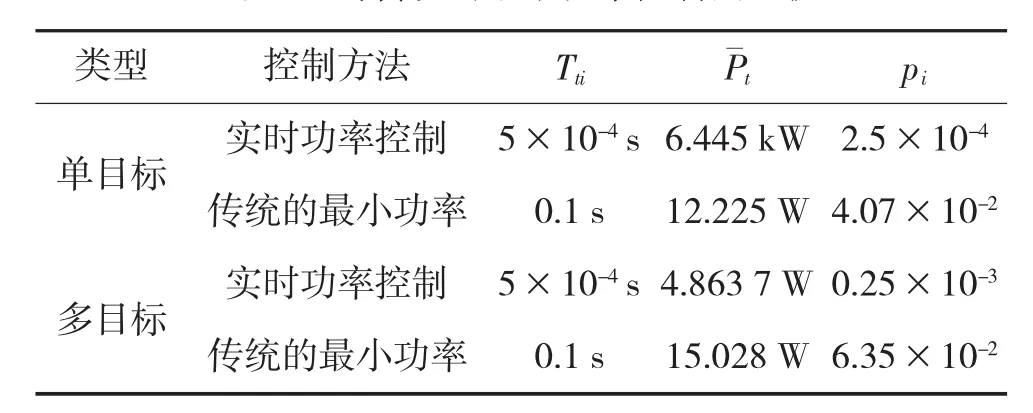
表2 与传统的最小功率控制法比较
对于多目标跟踪,设定跟踪目标个数为6,采用单目标的方法对目标的中间位置跟踪的同时,优化雷达的照射间隔,降低了截获概率。由图7可以看出,开始跟踪时由于辐射功率较大导致其截获概率较高,随着时间的推移,实时功率控制的优势显示出来,降低了截获概率,当照射时间为500 ms时,可得到低于0.25×10-3的截获概率,达到了预期的目的,故在目标跟踪周期中合理分配时间资源,能够实现对多目标隐身跟踪的需求,使载机达到较好的射频隐身状态。
4 结论
本文以截获概率为优化目标,雷达最小接收功率为约束条件,得到了跟踪状态下单次辐射功率控制模型,提出基于雷达跟踪单目标和多目标跟踪状态下的射频隐身功率实时控制方法。
1)单目标跟踪方法中,通过仿真分析单目标跟踪方法,比传统的恒定功率法获得更低的截获概率。
2)多目标跟踪方法中,通过辐射功率的实时控制和时间资源的分配方法,能够在具备较高探测概率的同时,具有更好的射频隐身性能指标。不足之处是当多目标跟踪在一定的时间范围内功率控制有效,但超过一定界限后截获概率就会变大,这将在后续的研究中进一步探讨。
[1]GAO J Y.Analysis of low probability of intercept(LPI)radar signals suing the wigner distribution[D].California:Naval Post Graduate School Monterey,2002.
[2]LIU G S,GU H,SU W M ,et al.The analysis and design of modern low probability of intercept radar[C]//Proceedings of the 2001 Chinese Institute Electronics International Conference on Radar.2001:120-124.
[3]WILLEY R G.ELINT:the intercept and analusis of radar signals[M].Boston:Artech House,2006:1-5.
[4]张永顺,童宁宁,赵国庆.雷达电子战原理[M].北京:国防工业出版社,2006:1-3.
[5]张贞凯,周建江,汪飞,等.基于射频隐身的相控阵雷达功率控制算法[J].系统工程与电子技术(自然科学版),2012,34(11):2244-2248.
[6]冯博宇,王瑛,安航,等.机载雷达射频隐身性能风险的计算模型[J].系统工程与电子技术(自然科学版),2013,35(1):73-77.
[7]杨红兵,周建江,汪飞,等.飞机射频隐身表征参量及其影响因素分析[J].航空学报(自然科学版),2010,31(10):2040-2045.
[8]杨宇晓,周建江,徐川,等.射频隐身数据链功率控制方法研究[J].现代雷达,2013,35(12):80-84.
[9]刘宏强,魏贤智,李飞,等.基于射频隐身的雷达跟踪状态下单次辐射能量实时控制方法[J].电子学报,2015,10(10):2047-2052.
[10]承保国.雷达原理[M].北京:国防工业出版社,2008:121-122.