三维五轴平型织造技术与织机虚拟样机研究
2018-03-05王益轩李鹏飞王永强
周 能,王益轩,陈 雨,李鹏飞,王永强,刘 静
(西安工程大学 机电工程学院,西安 710048)
0 引言
三维多轴平型织造技术是一种新型织造技术,是对传统织造技术的拓展与革新。20世纪90年代以来,以三维多轴织物为骨架的复合材料凭借其薄壁化、轻量化、高韧性、耐冲击性、形态稳定性及设计灵活性等优点,已被广泛应用于航空航天、风力发电机叶片、交通运输、建筑、体育、休闲、音响、汽车零部件及运输器械等领域[1]。三维多轴织物的“多轴”体现在织物结构中纱线角度不同于轴线方向的个数[2]。传统三维织物结构用垂纱将分层叠放的经纱、纬纱进行捆绑,使之成为整体;而三维五轴织物既具有正交织物的各向异性,同时由于斜向纱线的存在,又具有某方向的平面属性,即各向同性,使织物力学性能更优[3]。
笔者基于编织、机织混合的原理,在充分研究三维五轴织物结构和织造工艺的基础上,对三维五轴平型织机进行了概念化设计。
1 三维五轴平型织机整体设计
1.1 预制件结构设计
设计的三维五轴平型织机预制件结构如图1所示,织物由5组纱线系统组成,包括经纱x、斜纱b1(与经纱呈+45°角)、斜纱b2(与经纱呈-45°角)、纬纱y和垂纱z。各组纱线呈伸直状态、相互平行排列于所在平面,纱线面内、层间无交织[4]。

a) 三维五轴织物W1
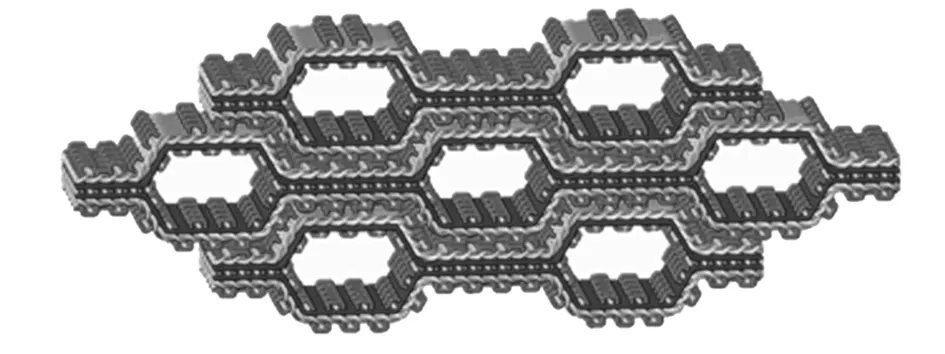
b) 三维五轴织物W2
1.2 织机概念化设计模型
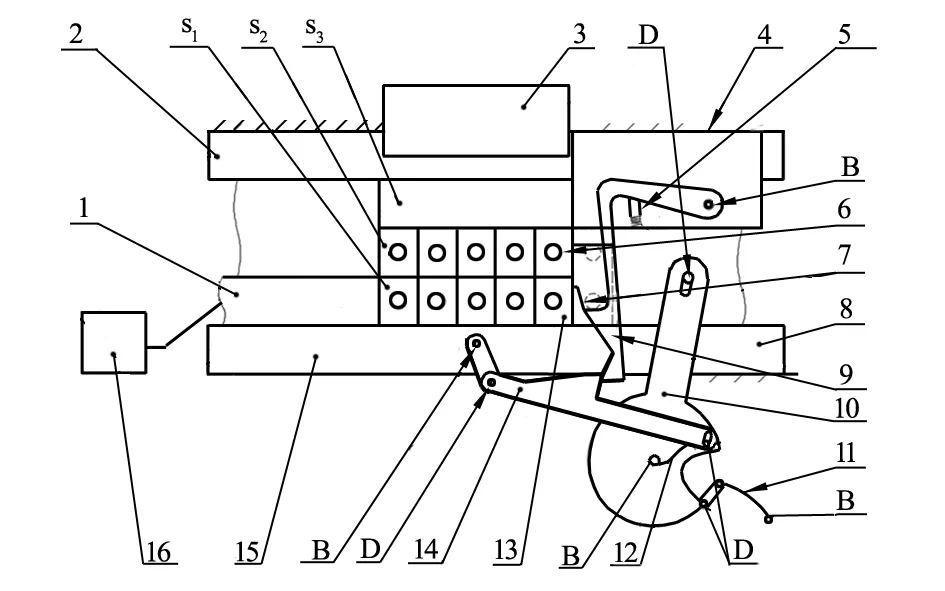
三维五轴平型织机结构如图2所示,经纱x与斜纱b1、b2经斜纱引导机构进入综框被引导至织口,垂纱引导机构通过综框在斜纱引导机构与织口之间往复运动,并引导垂纱z由上下两部分分别贯穿经纱层和斜纱层。纬纱引导机构引导纬纱y在经纱层间形成纬纱层。最终,纱线在织口处通过压紧机构、定型机构形成三维织物W[5-6]。

1—斜纱引导机构;2—综框;3,9—垂纱引导机构;4—织口;5—压紧机构;6—定型针;7—卷取机构;8—定型机构。图2 三维五轴平型织机结构
2 各引导机构的设计
2.1 斜纱引导机构
斜纱引导机构由4组独立的斜纱机构纵向排列而成,每组斜纱机构主要由2排斜纱引导块组成,每个斜纱引导块长为20 mm、宽为4 mm、高为5 mm,导纱管孔间距为4 mm,当织机幅宽设计为300 mm时,每排需750个斜纱引导块。斜纱引导块导轨与机架相连接,分别形成上、中、下三层位移平面S3、S2、S1。其中,S1由左、右两端气动推杆推动斜纱引导块横向移动,平面两端上升机构使横向凸出的一个斜纱引导块上升一个平面,并推动斜纱引导块在该平面横向移动;当完成一个时序后,纵向位移机构整体带动2排斜纱引导块下降一个平面,返回位移初始位置。
斜纱引导机构实现斜纱引导块连续、循环地以“蛇行”方式移动,使斜纱角度在±45°切换。为了简明、清楚地说明斜纱机构的运动原理,这里仅用10个斜纱引导块以特定顺序排列成2行,分别位于平面S1、S2,如图3所示。平面S1左侧气动推杆推动斜纱引导块右移,斜纱引导块带动滑块右移的过程中使旋转盘顺时针旋转一定角度,同时弹簧片11受力变形;旋转盘顺时针转动的过程中连杆14带动连杆9使连杆沟槽表面由平面S2移动至平面S1,并装夹斜纱引导块的导纱管,同时弹簧受力变形;当斜纱引导块完全移出平面后,旋转盘带动连杆14与9分离;在弹簧片11的作用下连杆9勾住斜纱引导块的导纱管使斜纱引导块上升至平面S2,连杆沟槽表面与左侧上升机构表面将导纱管定位、夹紧;随后,受力变形的弹簧片11带动旋转盘逆时针旋转,使滑块推动平面S2中的斜纱引导块左移进入左侧上升机构;由于弹簧片11的存在,避免了连杆14在回程中与连杆9碰撞、卡死,可以实现斜纱引导块连续装夹;最终,左、右两端上升机构重复以上运动5次后,纵向位移机构整体带动2排斜纱引导块由平面S3、S2返回至平面S2、S1,斜纱倾角发生转变。
1—左侧气动推杆; 2,15—斜纱引导块导轨;3—纵向位移机构;4—左侧上升机构;5—弹簧;6—左侧上升机构表面;7—连杆沟槽;8—滑块;9,14—连杆;10—旋转盘;11,12—弹簧片;13—斜纱引导块;16—气缸; B—固定铰链;D—活动铰链。图3 三维五轴平型织机斜纱引导机构
2.2 垂纱引导机构
垂纱引导机构由上、下两剑杆构成,引导垂纱z分别由上向下(或由下向上)贯穿经纱层与斜纱层,将经纱、纬纱和斜纱在织口处捆绑起来形成三维织物W;若垂纱引导机构1、3同时运动,则可得到三维织物W1;若垂纱引导机构1、3间隔运动,则可得到“蜂巢型”三维织物W2。
如图4所示,在一个织造时序内,垂纱引导机构

1,3—垂纱引导机构;2—织口。图4 三维五轴平型织机垂纱引导机构
1由上往下垂向贯穿经纱层与斜纱层,捆绑纬纱y与斜纱c(斜纱b1、b2异面交叉处)横向移动至织口,再竖向移动一定距离捆绑紧纱线,然后垂纱引导机构1以原方式回程穿过经纱层与纬纱层,接着捆绑纬纱y与表面纱线横向移动至织口,再垂向抬高一定距离捆绑紧纱线,最后垂纱引导机构1返回初始位置,完成一个时序。
2.3 纬纱引导机构
纬纱引导机构主要由剑杆和接触杆A、B组成。剑杆引导纬纱y在平面内纵向移动至图5所示位置,接触杆A凸出水平面,接着剑杆返回纬纱y,接触杆A移动至接触杆A′位置;然后,定型机构中定型针5和接触杆B凸出水平面,接触杆B以同样方式移动至接触杆B′位置,定型针6凸出水平面,最后接触杆A、B退出水平面,返回纬纱y引入。
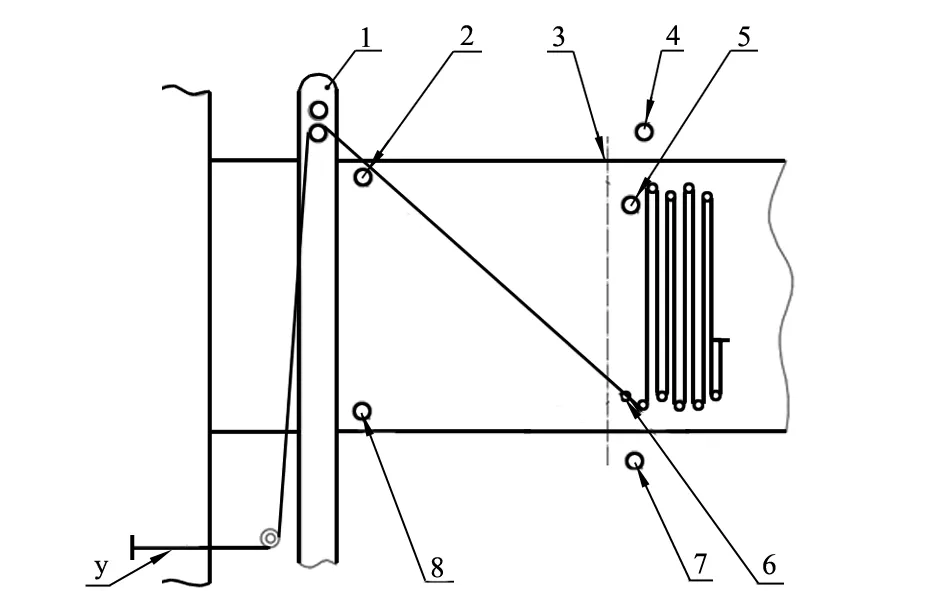
1—剑杆;2—接触杆A;3—织口;4—接触杆A′;5,6—定型针;7—接触杆B′;8—接触杆B。图5 三维五轴平型织机纬纱引导机构
2.4 各主要机构运动配合关系
各主要机构运动配合关系如图6所示,纵坐标为位移s,横坐标为时间t。斜纱引导块初始位移零
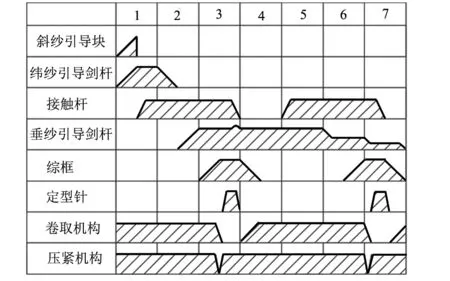
图6 三维五轴平型织机各机构运动时间配合关系
点代表斜纱引导块位于平面S2、S1,纬纱引导剑杆初始位移零点代表剑杆靠近进纱口位置,接触杆初始位移零点代表接触杆未凸出织物平面,垂纱引导剑杆初始位移零点代表剑杆组远离织物平面,其对应凸出位置为打紧时刻,综框初始位移零点代表综框远离织口位置,定型针初始位移零点代表定型针未凸出定型机构平面,卷取机构初始位移零点代表
未卷取,压紧机构初始位置零点代表压紧机构远离织物平面。
笔者已在PTC Creo 4.0和ADAMS 2013中建立了以上各机构的虚拟样机模型,可做详细的仿真设计。同时,根据图6所示的运动配合关系,可在PTC Creo 4.0和ADAMS 2013中分别建立三维五轴平型织机整机的虚拟样机模型,并进行各机构的详细仿真、优化设计和各机构的运动配合设计。
3 结论
3.1 新型斜纱引导机构区别于传统的环形轨道斜纱引导方式,斜纱引导块以“蛇行”方式移动,从而使织机结构更加紧凑、织造幅宽大幅增加。
3.2 “蜂巢”结构的三维织物可作为复合材料结构的加强版,能代替传统材料结构如混凝土、木材和钢材,拓宽了三维多轴平型织物的应用领域。
3.3 根据斜纱、垂纱、纬纱引导机构原理,建立了各机构之间的运动配合关系,为织造新型三维五轴织物提供理论基础。
[1] Bilisik K.Multiaxis Three-dimensional Weaving for Composites:A Review[J].Textile Research Journal,2012,82(7):725-743.
[2] Labanieh A R,Legrand X,Koncar V,et al.Development in the Multiaxis 3D Weaving Technology[J].Textile Research Journal,2015,86(17):19-26.
[3] 路超,王益轩,赵梅.多轴三维织机斜纱引入机构的设计[J].纺织器材,2014,41(5):1-5.
[4] Uchida H,Yamamoto T,Takashima H,et al.Three-dimensional Weaving Machine:US,US6003563[P].1999.
[5] Uchida H,Nishiyama S,Shinya M.Method for Manufacturing Solid Structural Material and Foundation Fabric There for:US,US6470916[P].2002.
[6] Anahara M,Yasui Y,Omori H.Three Dimensional Fabric and Method for Producing the Same:US,US5137058[P].1992.
