微动开关行程和力自动测量方法研究
2018-03-05刘尧峰赵长青
刘尧峰 宋 斌 赵长青
(成都天奥测控技术有限公司,四川成都611731)
0 引言
微动开关是具有速动机构及微小触电间隙的精密机械电气开关[1]。微动开关出厂需测量部分指标,如行程(预行程、超行程)、力(操作力、释放力)等,同时还需要实时记录力和行程之间的关系。
传统的人工测量方法可以测量这几项指标,但都是分项测量,如采用千分尺进行测量,测量精度和重复性差,且不能测量力和行程的关系。
目前常用的自动化测量主要为接触式测量,如采用直线光栅尺来测量开关的行程[2],配合力传感器测量力,但力传感器在测量过程中的变形会产生位移,而该位移无法精确计算,故采用直线光栅尺的距离作为开关的行程有一定的误差。
基于以上原因,提出了一种自动测量力和行程的方法:采用激光测距传感器测量行程,采用力传感器测量力。该方法效率高、重复精度高,可广泛应用于类似开关的测量。
1 原理设计
微动开关安装在力传感器安装板右端,激光测距传感器安装在安装板左端(图1),当力传感器下降时,微动开关的触点接触安装板,开关跟随力传感器下降,由于微动开关弹簧对力传感器的反作用力,传感器作用区域将弯曲变形,产生微小的位移ΔX,微动开关总的行程是力传感器的平移距离X与ΔX之和,也即激光测量的距离(图2)。
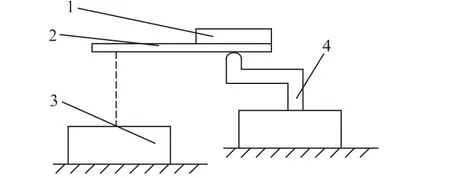
图1 结构正视示意图
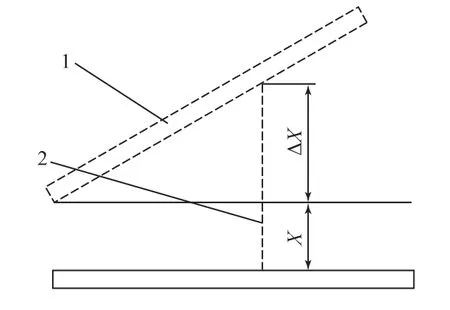
图2 行程测量示意图
2 结构设计
如图3所示,测力和行程结构由驱动装置、力传感器、激光测距传感器组成;驱动装置负责力传感器的驱动,力传感器安装在驱动装置上,微动开关安装在定制的工装上;激光测距传感器安装在机座上。
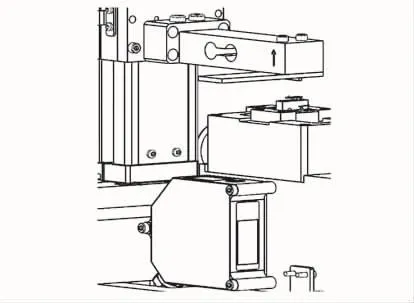
图3 测力和行程结构图
测试流程:驱动装置向微动开关方向运动,当力传感器刚接触到开关时,传感器产生微小形变所输出的电压信号作为激光测距传感器的测试基准(初始位置)。驱动装置驱动传感器继续运动,当达到微动开关的预行程(开关触点刚好接触)时,示波器采集到触发信号,同时将该信号发送给激光传感器作为预行程测量值;当驱动装置达到激光传感器设定的全行程值时,驱动装置停止运动。
3 行程、力测量理论分析
3.1 行程测量分析
激光在测量时产生光斑,当被测物体与光斑垂直时,被测物体的实际尺寸即为L(图4);当被测物体与光斑不垂直时,激光在被测物上会产生位移分量,使得激光测量出的数值与实际距离有偏差,需进行误差分析。
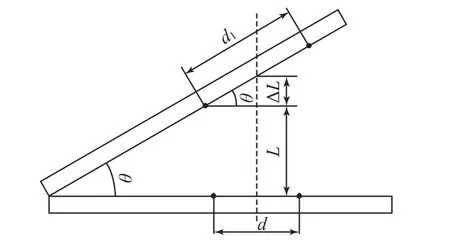
图4 激光测量分析图
设传感器的变形角度为θ,激光光斑的大小为d×b(长边×短边),光斑在投影面上的形状为椭圆形,则长边大小为d1=d/cos θ,因光斑大小引起的距离误差为ΔL=(d1sin θ)/2=(dtan θ)/2。
首先计算传感器的末端位移y,再计算激光光斑大小引起的误差ΔL,计算如下:

式中,y为传感器的末端位移;F为开关的作用力;L为力作用点距离;E为力传感器弹性模量;I为力传感器惯性矩。
取微动开关作用力F=10 N,L=130 mm,E=6.9×10-4N/mm2,I=8 748 mm4,计算得y=0.012 mm。

则误差ΔL=0.35×9.23×10-5/2=1.6×10-5mm,光斑大小引起的距离误差忽略不计。
从理论上分析激光传感器测量的距离即为微动开关的动作行程。为满足要求,选取传感器的行程为20 mm,精度为0.005 mm。
3.2 力测量分析
开关力的大小采用力传感器测量,传感器接触开关时产生微弱形变并输出毫伏级电压信号。为满足要求,选取力传感器范围为50 N,精度为0.01%FS,选用6位半高精度数字万用表实现对该信号的高精度测量,测量精度达0.001 5%。则力的综合测量精度为:

因此,从理论上分析,力传感器及6位半高精度数字万用表可用于微动开关力的测量。
4 测试结果
经过实际测试,得到行程和力的曲线如图5所示。
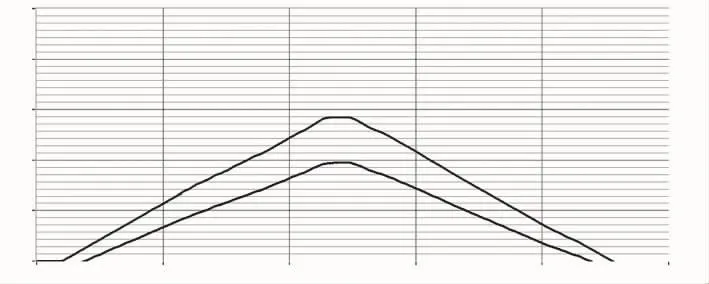
图5 力—位移曲线图
5 结语
通过激光测距和力传感器组合测量微动开关的行程和力,避免了人工测量的误差,同时采用激光测距仪直接测量行程,避免了中间的测量环节,测量精度高,重复性好,该方法也可实时显示力和位移的关系,满足实际测试需求。
[1]微动开关通用规范:GJB 809A—1997[S].
[2]刘仁义,代明德,刘俊,等.微动开关压力行程数字化综合测量仪:200810068934.3[P].2008-10-09.
