共聚焦激光扫描显微系统光学设计
2018-03-01肖海东吴永前
肖海东 吴永前

文章编号: 1005-5630(2018)06-0065-10
摘要: 为了实现非接触式、快速高精度的光学检测,设计了一种共聚焦激光扫描显微光学系统。在保证设计指标的前提下,简化了各光组的结构,采用7片球面透镜并以K9玻璃作为透镜材料。使用Zemax软件对光学系统进行了设计和仿真。结果表明:物镜的数值孔径为0.49;系统的径向和轴向光学分辨率分别为0.400 μm和0.772 μm;显微聚焦系统聚焦弥散斑直径小于2 μm;照明系统聚焦弥散斑直径小于10 μm;探测系统的聚焦光斑直径小于20 μm;根据仿真结果确定了针孔1和针孔2的尺寸均为20 μm,且厚度不超过0.1 mm;各子系统的MTF曲线均接近衍射极限,具有很高的光学传输效率。
关键词: 光学设计; Zemax; 激光共聚焦; 显微物镜; 照明系统; 探测系统
中图分类号: O 439; TH 742文献标志码: Adoi: 10.3969/j.issn.1005-5630.2018.06.011
引言
与普通光学显微镜不同,共聚焦激光扫描显微镜(confocal laser scanning microscope,CLSM)以激光为照明光源,通过独特的针孔滤波技术和共轭成像原理,抑制了显微物镜焦点之外的物点信息的光信号,进而提高了光学分辨率,同时采用相应的扫描技术,又可以弥补CLSM系统视场小的缺点[1-4]。因此在理想情况下,CLSM能够实现点对点成像。与普通光学显微镜相比,CLSM系统在获得更高的横向分辨率的同时,还具有较高的纵向分辨率。利用这种特性,可以实现对样品的三维结构重建和测量分析,为研究透明物体的内部结构提供了参考[5]。
1基本原理
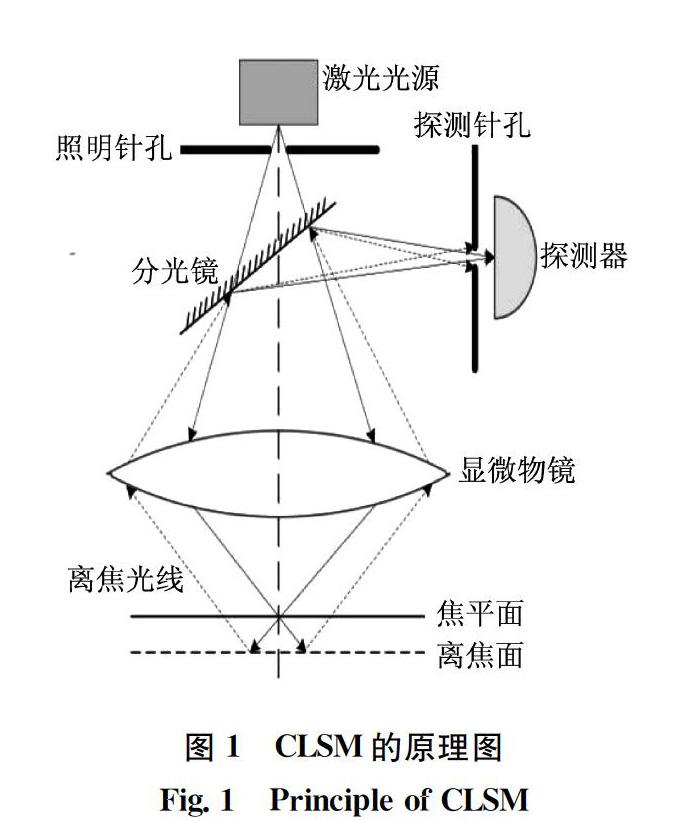
CLSM的本质是物像共轭,具体表现为:照明光源和探测器所处的位置分别与显微物镜焦点位置共轭,CLSM利用这种共轭关系抑制了光束离焦量和系统杂散光对光学分辨率和精度的影响,其基本原理如图1所示[6]。CLSM利用针孔对光源的空间滤波和整形,形成点光源;点光源能量高度集中,避免了场光源照射时可能产生的衍射和散射光干扰的问题;它通过显微物镜聚焦,在焦平面上形成一个聚焦光点;待测样品处的反射光或者荧光标记物被照射后发出的荧光被物镜收集,并沿着原光路返回分光镜,分光镜将返回的光束反射并通过聚焦成像透镜经由探测针孔会聚于探测器[3-4,7-8]。在CLSM中,只有在物镜焦平面上的聚焦光点处的反射光或者荧光才能够通过探测针孔,而焦平面以外的干扰光和散射光不能通过探测针孔,这就是共聚焦显微系统具有很高光学分辨率的原因[9]。
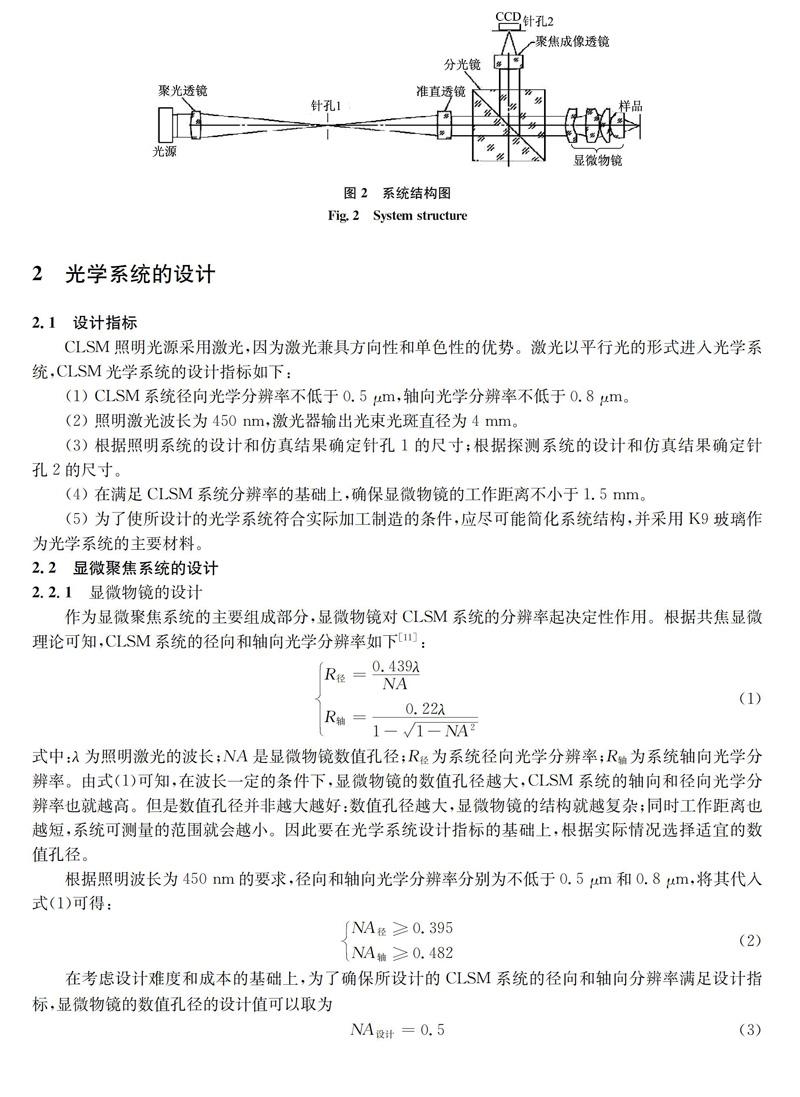
CLSM系统主要由照明光源、聚光透镜、针孔1、准直透镜、分光镜、显微物镜、聚焦成像透镜、针孔2、光电探测元件等构成,系统结构如图2所示。聚光透镜和准直透镜配合针孔1用于激光光束的整形和准直;显微物镜用于将照明光束聚焦和收集被测样品的反射光;聚焦成像透镜用于将反射光会聚在探测针孔处,以便CCD探测器探测光信号;分光镜用于分光。分光光路采用平行光路,这样可以在光路中插入分光棱镜、偏振片等元件而不引入像差,还可以根据需要调整光路长度。按功能CLSM系统可以分为三个子系统:准直透镜和显微物镜组成显微聚焦系统;光源,聚光透镜和针孔1组成照明系统;聚焦成像透镜和显微物镜组成探测系统[10]。下面将介绍各子系统的光学设计结果。
2光学系统的设计
2.1设计指标
CLSM照明光源采用激光,因为激光兼具方向性和单色性的优势。激光以平行光的形式进入光学系统,CLSM光学系统的设计指标如下:
(1) CLSM系统径向光学分辨率不低于0.5 μm,轴向光学分辨率不低于0.8 μm。
(2) 照明激光波长为450 nm,激光器输出光束光斑直径为4 mm。
(3) 根据照明系统的设计和仿真结果确定针孔1的尺寸;根据探测系统的设计和仿真结果确定针孔2的尺寸。
(4) 在满足CLSM系统分辨率的基础上,确保显微物鏡的工作距离不小于1.5 mm。
(5) 为了使所设计的光学系统符合实际加工制造的条件,应尽可能简化系统结构,并采用K9玻璃作为光学系统的主要材料。
(6)为了便于后续设计,显微物镜的入瞳可以取整为D=6 mm。考虑到系统工作距离不少于1.5 mm,去除相应的机械结构占用和设计余量,显微物镜工作距离应取2 mm。
根据数值孔径、放大率、工作距离等参数在《光学设计手册》中选定一组由四个单透镜组成的初始结构。在初始结构的基础上进行修改以满足数值孔径、放大率、工作距离等参数的设计要求,材料选用K9玻璃,优化时只需要校正显微物镜的轴上点球差。波长选择450 nm,入射光瞳为6 mm,利用Zemax对修改后的显微物镜的初始结构进行仿真和优化,最终得到优化后的显微物镜结构参数,如表1所示,此外,根据Zemax的仿真结果列出了优化后的显微物镜的主要参数,如表2所示。
2.2.2准直透镜的设计
准直透镜的作用是将针孔1整形和滤波后形成的点光源准直为平行光束入射到显微物镜,同时使平行光束尽可能充满显微物镜的入瞳。显微物镜入瞳为6 mm,所以准直透镜的出射光束直径为6 mm。采用单透镜,玻璃材料为K9,工作波长为450 nm,在Zemax的afocal focus模式下对初始结构进行像差自动校正与平衡。优化后最终得到准直透镜的结构参数,如表3所示,2D结构图如图6所示,由此可知准直透镜出射光束在透镜后表面20 mm处的光束半径为3 mm,满足显微物镜入瞳要求。
准直透镜的点列图如图7所示,出射光束发散角为0.092 mrad,准直效果很好。准直透镜的MTF曲线如图8所示,曲线接近衍射极限,透镜的光学传输效率很高。
2.2.3显微聚焦系统总体设计
准直透镜和显微物镜组成显微聚焦系统,对显微聚焦系统进行优化时,只需要校正轴上点球差。为了保证显微物镜的数值孔径、焦距等特性参数不变,将准直透镜曲率半径和厚度设为变量,显微物镜相关参数不变,进行自动优化。此外,还需在默认评价函数的基础上添加REAY操作数控制准直透镜的出射光束半径保持为3 mm,以保证光束能够满足显微物镜入瞳的要求。优化后显微聚焦系统的结构参数如表4所示,2D结构图如图9所示。
由表4可知,优化后显微物镜的结构参数没有变化,因此其数值孔径、焦距等特性参数保持不变。显微聚焦系统的点列图和MTF曲线分别如图10和图11所示。由此可知:系统焦点弥散斑直径小于2 μm,RMS半径为0.355 μm,光斑集中在艾里斑范围内;MTF曲线接近衍射极限,因此显微聚焦系统具有极高的传输效率和分辨率。综合上述评价,显微聚焦系统的优化结果十分理想。
2.3照明系统的设计
照明系统由聚光透镜和针孔1组成,其作用是将照明激光整形和滤波成为近似点光源,对可能进入系统的杂散光起到抑制作用。聚光透镜采用单透镜,玻璃材料为K9,工作波长为450 nm。根据提出的设计指标可知,激光器输出光束光斑直径为4 mm,因此聚光透镜入瞳为4 mm。
优化后的照明系统结构参数如表5所示,2D图如图12所示。针孔1位于聚光透镜的焦点位置。照明系统的聚焦光斑同样也是聚光透镜的聚焦光斑,其点列图如图13所示,可知光斑直径小于10 μm,RMS半径为1.806 μm,较好地模拟了光斑很小的点光源。此外,根据图14所示的照明系统离焦点列图可知,在离焦50 μm处的离焦弥散斑直径小于20 μm。根据以上仿真结果,为了使针孔1满足对照明激光空间滤波和整形的要求,其直径可以取为20 μm,厚度不超过0.1 mm。
照明系统的MTF曲线如图15所示,曲线接近衍射极限,光学传输效率很高,优化结果理想。
2.4探测系统的设计
2.4.1聚焦成像透镜的设计
显微物镜成像在像方无限远处,根据共焦原理,要将物镜焦平面处的被测样品反射回来的光束聚焦在探测器上,需要有一个聚焦成像透镜。为了充分收集显微物镜反射回来的光束,聚焦成像透镜的入瞳直径不能小于显微物镜的入瞳直径,所以聚焦成像透镜的入瞳取为6 mm,波长为450 nm。考虑简化CLSM系统的结构,采用单透镜作为初始结构,优化后得到聚焦成像透镜的结构参数,如表6所示,聚焦成像透镜的结构图如图16所示,点列图如图17所示,MTF曲线如图18所示。
由此可知:聚焦成像透镜的入瞳直径为6 mm,满足显微物镜的入瞳要求;聚焦光斑直径小于20 μm,RMS半径为2.038 μm;光斑集中在艾里斑范围内,能量集中度很高;MTF曲线接近衍射极限,光学传输效率很高,说明透镜的优化结果比较理想。
2.4.2探测系统总体设计
將反向显微物镜、聚焦成像透镜和分光镜组合即组成探测系统。对探测系统进行优化时,只需要校正轴上点球差。为了避免显微物镜和聚焦成像透镜的主要性能参数在优化过程中发生不符合预期的变化,只需要将聚焦成像透镜的工作距离设为变量。优化后的探测系统结构如图19所示,探测系统点列图如图20所示。
由图20可知,聚焦光路的弥散斑直径小于20 μm,RMS半径为6.364 μm。探测系统的离焦光斑点列图如图21所示,在离焦50 μm处的离焦弥散斑直径小于20 μm。与确定针孔1尺寸的过程类似,为了使针孔2实现对探测激光的有效空间滤波,其尺寸应取为直径20 μm,厚度不超过0.1 mm。
由于探测系统的作用是将显微物镜收集的反射光聚焦在探测针孔上,聚焦能量越集中,光强就越容易达到探测器响应的阈值,引起探测器的响应。因此光能量的传输效率可以作为评价探测系统设计结果的重要指标。下面将从MTF曲线和OPD函数出发,进一步评价探测系统的设计结果。
探测系统的MTF曲线如图22所示,可以看到曲线接近衍射极限,这说明探测系统的光学传输效率很高,成像质量很好,设计结果理想。
3结论
本文设计了一种CLSM光学系统,采用结构简单的球面透镜实现了显微聚焦系统、照明系统和探测系统的设计。其中,显微物镜的聚焦弥散斑直径小于1 μm,数值孔径为0.49,工作距离大于2 mm,同时系统径向和轴向光学分辨率分别为0.400 μm和0.772 μm,均达到设计要求。显微聚焦系统的聚焦弥散斑直径小于2 μm,照明系统聚焦弥散斑直径小于10 μm,探测系统的聚焦弥散斑直径小于20 μm。根据照明系统和探测系统的离焦点列图确定了针孔1和针孔2的尺寸。此外,各子系统的光学传递函数曲线均接近衍射极限,表明光学系统的设计和优化结果比较理想,光学传输效率很高。综上,该光学系统结构简单紧凑、径向和轴向分辨率较高,可以满足医学、材料、生物和光学检测等领域对激光共聚焦显微系统的需求。
此外,本文设计的系统仍有可以改进的地方,如系统的物镜数值孔径较小,可以采用非球面镜提高物镜的数值孔径,同时还可以简化物镜的结构,减少镜片数量,从而进一步提高CLSM的光学分辨率和检测效率。
参考文献:
[1]SHEPPARD C J R,WILSON T.Depth of field in the scanning microscope[J].Optics Letters,1978,3(3):115117.
[2]MEGGITT B T.Geometrical measurements of fibre-optic starter tubes using a novel optical technique[J].Optics & Laser Technology,1989,21(5):345.
[3]CARLSSON K.Scanning and detection techniques used in a confocal scanning laser microscope[J].Journal of Microscopy,1990,157(1):2127.
[4]DAINTY C.Theory and practice of scanning optical microscopy[J].Optica Acta,1985,32(12):14511452.
[5]姜曼,陶振强,蒋庭佳,等.基于连续扫描方式的激光共焦扫描显微镜的研制[J].光学仪器,2013,35(5):6065.
[6]MINSKY M.Microscopy apparatus:US,3013467A[P].19611219.
[7]WILSON T,CARLINI A R.Effect of detector displacement in confocal imaging systems[J].Applied Optics,1988,27(18):37913799.
[8]孔兵,王昭,谭玉山.利用共焦成像原理实现微米级的三维轮廓测量[J].西安交通大学学报,2001,35(11):11511154.
[9]GU M.共焦显微术的三维成像原理[M].王桂英,陈侦,杨莉松,等译.北京:新时代出版社,2000:1823,177196.
[10]DIASPRO A.Confocal and two-photon microscopy:foundations,applications,and advances[M].New York:Wiley,2002:3974.
[11]程碩.超分辨激光差动共焦微孔测量技术研究[D].北京:北京理工大学,2015.
[12]罗刚银,王弼陡,缪鹏,等.激光共聚焦近红外荧光扫描系统光学设计[J].应用光学,2015,36(1):2934.
[13]范应娟,张艳军.基于Zemax的HeNe激光光束聚焦物镜的设计[J].应用光学,2010,31(6):10321035.
(编辑:刘铁英)
