X-in-the-loop方法在燃料电池汽车动力系统测试上的应用∗
2018-03-01牛文旭陈会翠高海宇
章 桐,牛文旭,陈会翠,宋 珂,高海宇
(1.同济大学新能源汽车工程中心,上海 201804; 2.同济大学汽车学院,上海 201804; 3.同济大学中德学院,上海 200092)
前言
燃料电池汽车因其能量密度与能量转化效率高和环境友好的特点,具有广阔的发展前景。在燃料电池汽车开发过程中,动力系统的测试验证是其中的重要环节。由于燃料电池汽车动力系统同时具有结构复杂、涉及部件众多和模型验证难度高等特点,现有的开发验证方法难以完全满足要求。因此,需要引入新的测试验证方法,以完成燃料电池汽车动力系统的测试验证工作。
1 燃料电池汽车动力系统测试现状
针对燃料电池汽车动力系统测试验证的要求,国内外学术机构和企业开发了不同规格和结构的燃料电池汽车动力系统测试平台。其主要功能单元包括人机交互系统、燃料电池系统、其他电源系统、DC/DC转换系统、驱动电机系统、测功机系统和数采系统等。
在小型燃料电池动力系统测试平台方面,文献[1]中开发了一套小型燃料电池汽车动力系统测试平台,可完成整套动力系统的匹配和性能测试。文献[2]中开发了一套燃料电池/超级电容双能源测试系统,并分析比较了该系统中单一能源供电与双能源供电的效果。文献[3]中开发了一套5kW燃料电池/超级电容动力系统测试平台,可完成动力系统性能测试。文献[4]中开发了一套5kW燃料电池/蓄电池动力系统测试平台,可完成动力系统动态性能测试和能量管理控制策略研究。
在燃料电池汽车动力系统虚拟测试方面,文献[5]中采用CompactRIO嵌入式控制器与Lab-VIEW图形化设计软件来设计燃料电池的控制系统,使用NI CompactRIO控制器来监视和控制燃料电池机车和控制器局域网(CAN)总线的安全和运行。另外,文献[6]中采用基于NI VeriStand的实时测试环境,Wineman Technology公司的INERTIA控制附加软件和NI PXI的硬件测试系统,创建了硬件在环(HIL)测试系统,使其能仿真、控制、监测福特汽车公司开发的乘用车燃料电池动力系统模型。
文献[7]中开发了一套燃料电池电动汽车动力系统综合测试平台,可完成30kW燃料电池/动力蓄电池动力系统测试,为动力系统的控制、性能的测试和工况的模拟提供了可靠的平台,可完成系统的控制和部件的测试等。文献[8]中开发了超级电容与燃料电池发动机混合动力系统测试平台,可满足额定功率为70kW的燃料电池发动机的动力系统测试的要求。另外,文献[9]~文献[11]中开发了针对燃料电池发动机、DC/DC变换器、电机和控制器等关键部件的测试平台。
燃料电池动力系统包含了诸多不可测量或难以测量的量,这些量对于整个动力系统又是不可或缺的。利用若干可测量并通过合适的算法进行估计、推断和预测出这些量,已成为解决上述问题的一种有效途径。
考虑到燃料电池汽车动力系统的开发测试要求,现有燃料电池汽车动力系统测试平台存在一定局限性。它主要以动力系统关键部件(驱动电机、燃料电池发动机等)测试台架为主,缺少联动设备。针对大功率车载燃料电池发动机/动力蓄电池构成的动力系统的测试平台较少,无法满足该类动力系统的开发测试需求。另外,若出现某一动力系统关键部件缺失的情况,现有测试平台无法实现软硬件的测试。
针对现有测试平台的不足,须引入新的开发测试方法,开发新型燃料电池汽车动力系统测试平台,以满足开发测试的需要。
2 X in the Loop开发测试验证方法
X in the Loop开发测试验证方法由德国Karlsruhe Institute of Technology的Albers教授等学者提出,旨在针对日益复杂的整车系统,集成驾驶员和环境,是一种新型的整车开发和验证方法[12]。X in the Loop中的X指待测试单元(Unit under test, UUT),它可以是模型(Model in the Loop,MiL)、软件(Software in the Loop, SiL)或硬件(Hardware in the Loop, HiL)[13-14]。 X in the Loop方法可集成仿真模型和真实组件,并充分应用现有工具和方法,可充分考虑驾驶员和外界环境对于需求和开发过程的影响。该方法的核心是当测试中出现部件缺失的情况时,利用模型或代码替代缺失部件,实现软硬件结合测试。
X in the Loop方法中的Model in the Loop,即模型在环,意指被测对象的存在形式为模型,利用环内其他部件的软件或硬件形式,对模型进行验证和标定。模型在环的测试结果是软件在环的重要参考。Software in the Loop,即软件在环,意指被测对象的存在形式为代码,利用实时仿真平台与环内其他部件的软硬件进行数据交互,从而对代码的准确性进行验证。Hardware in the Loop,即硬件在环,在传统V模式开发中,指实际控制器与虚拟控制对象组成的仿真系统。在X in the Loop方法中,硬件在环的范围由狭义的控制器扩展到广义的硬件,即被测对象的存在形式为硬件,利用环内其他部件的软硬件对被测硬件进行测试验证。
典型的X in the Loop开发测试验证方法在动力系统开发测试中的应用,包括以下组成部分:动力系统关键部件测试平台,动力系统关键部件仿真平台,驾驶员和环境仿真模拟系统,如图1所示。
在该架构下,动力系统测试验证平台的结构更为灵活。对于测试对象为部件、子系统或系统等不同情况,充分利用模型库中的整车和动力系统模型,构建出测试环,来完成其他部件或子系统缺失时的测试。
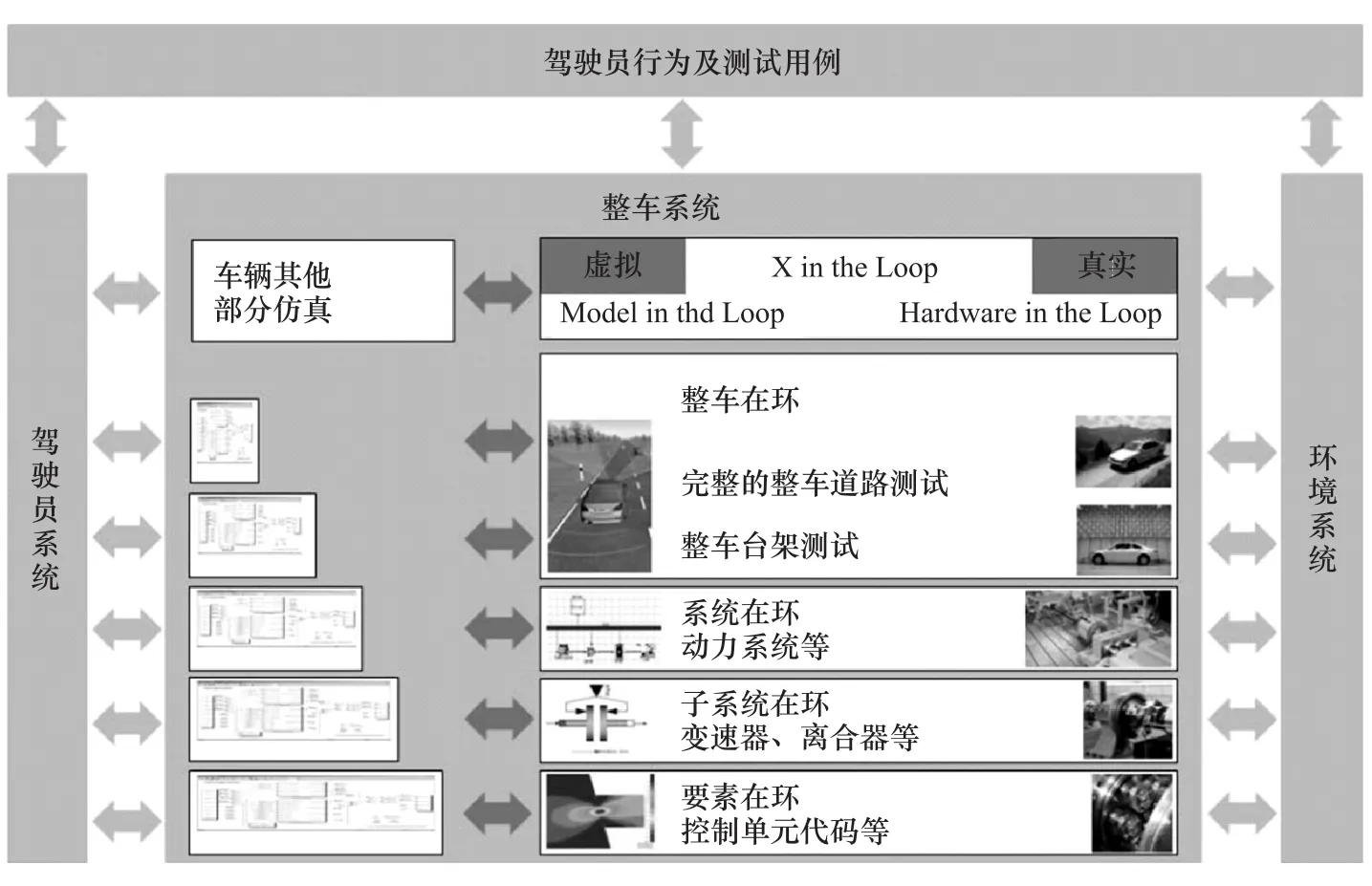
图1 基于X in the Loop的动力系统测试平台架构[13]
3 燃料电池汽车动力系统动态性能综合测试仪器平台
基于X in the Loop方法,参考典型的X in the Loop开发测试验证方法在动力系统开发测试中的应用,并考虑燃料电池汽车动力系统测试的现状和特点,文献[15]中开发了一套燃料电池汽车动力系统动态性能综合测试仪器平台[15]。该平台为一套综合考虑温度、湿度、压力环境和NVH环境,进行燃料电池汽车动力系统及其关键零部件匹配和测试的多功能重大仪器。该测试平台的组成框架如图2所示。
该测试平台包括燃料电池电堆测试模块、燃料电池发动机匹配测试模块、燃料电池汽车动力系统匹配测试模块、燃料电池汽车动力系统仪器仿真模块、NVH环境、温度/湿度/压力环境、综合数据管理模块和仪器主控系统。其中燃料电池汽车动力系统仪器仿真模块包含了燃料电池汽车动力系统的主要部件模型,即燃料电池发动机模型、动力蓄电池模型和电驱动系统模型,以及模型运行硬件环境。燃料电池汽车动力系统匹配测试模块包含动力系统测试的核心硬件设备,包括测功机和电源模拟/电子负载。综合数据管理模块包含测试所需工况信息、工况显示系统和驾驶模拟台架。仪器主控系统是整套测试平台的中枢,可实现被测系统匹配、系统控制策略设定、整车模型设定和设备总体控制与监测。
由于该测试平台提供了燃料电池汽车动力系统主要部件的模型与测试平台,且仪器主控系统可实现不同软硬件设备信息流的交互,因此,在该测试平台上,可应用X in the Loop方法,实现动力系统集成测试。
构建合适的应用场景是X in the Loop方法的重点之一。由于本测试平台集成燃料电池堆匹配测试模块、燃料电池发动机匹配测试模块和燃料电池汽车动力系统匹配测试模块于一体,能实时联动测试分析燃料电池动力系统的多项技术指标和性能指标,仪器综合度高,因此构建合适且典型的测试场景,确定可在该平台上实现的测试项目,是在该平台上应用X in the Loop方法的重要工作。
在测试验证中,主要涉及的模型包括燃料电池模型、蓄电池模型、DC/DC模型、电机模型、整车模型、控制策略模型和驾驶员模型等,各模型主要参数如表1所示。
4 X in the Loop方法在动力系统测试中的应用场景
4.1 Model in the Loop(模型在环)
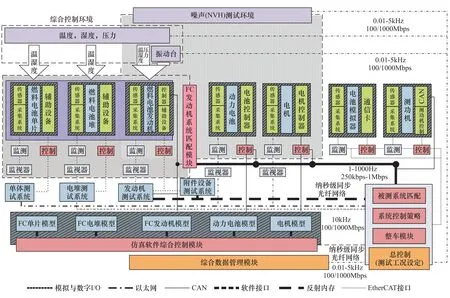
图2 燃料电池汽车动力系统动态性能综合测试平台框架
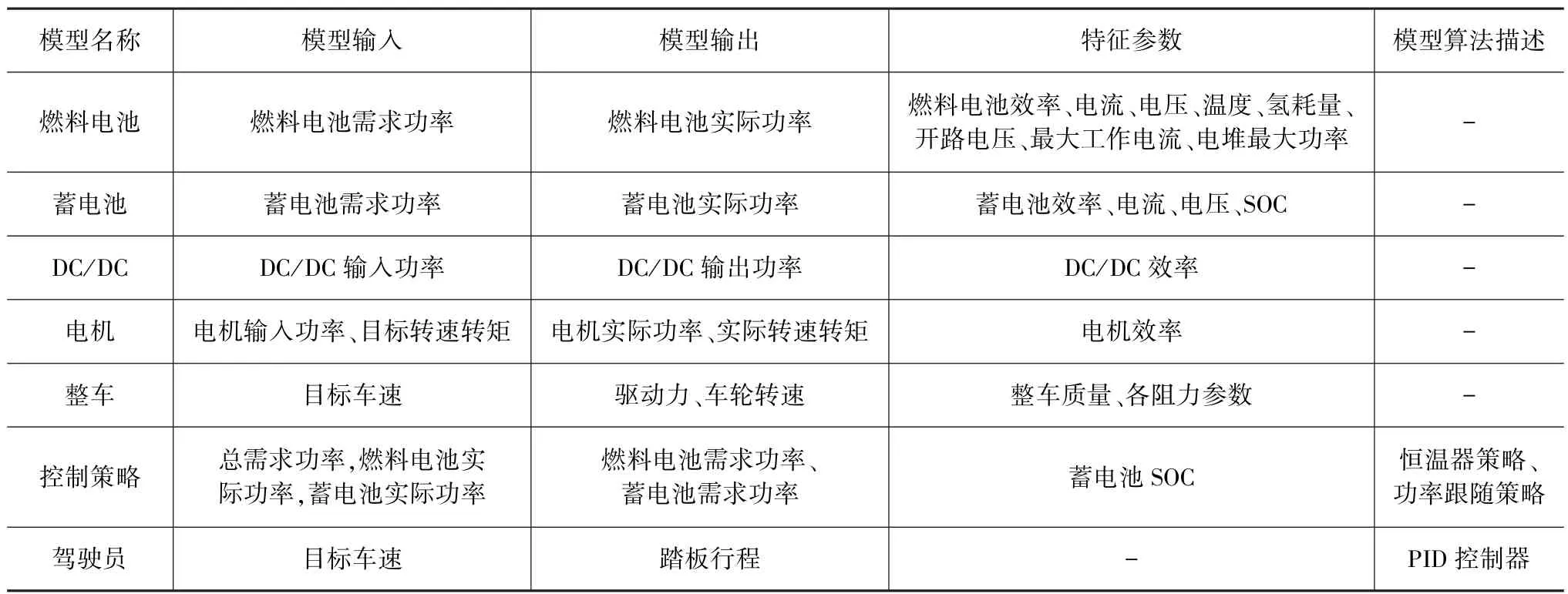
表1 模型参数
Model in the Loop的测试验证对象为模型,组成环的其他部分为硬件或软件。在本测试平台上,可利用燃料电池汽车动力系统仪器仿真模块中的动力系统主要部件模型,作为测试验证对象,模型运行环境为实时仿真器。当燃料电池模型/蓄电池模型作为测试验证对象时,主控系统将燃料电池模型/蓄电池模型与电源模拟器相连,电源模拟器产生的电能由负载系统(电驱动系统或电子负载)消耗,从而实现燃料电池/蓄电池模型在环。当电驱动系统模型作为被测对象时,电驱动系统需求功率由工况决定,该需求功率直接由电源模拟器提供,由负载系统消耗,不受电源模型的电流电压特性的约束。
图3为基于该测试平台应用的一种模型在环典型场景,即燃料电池模型测试验证,该场景利用实时仿真器、电源模拟器和测功机等硬件和蓄电池模型、电驱动模型和整车模型等模型来实现燃料电池模型的验证。测试仪器的综合数据管理模块中包含了测试所用的工况信息,它可由驾驶模拟器采集,或由综合数据管理模块后台数据库提供。测试仪器的主控系统的主要功能为任务调度、运行整车模型与控制策略模型和通信调理等。测试仪器的实时仿真器主要运行动力系统关键部件模型,包括蓄电池和燃料电池及其辅助系统等。电源模拟器的主要功能为根据模型数据提供电流电压信号,并向电驱动系统输出。其中燃料电池模型、蓄电池模型、电驱动模型和主控系统中的整车模块(实现整车模型功能),构成了一个完整的燃料电池动力系统模型。
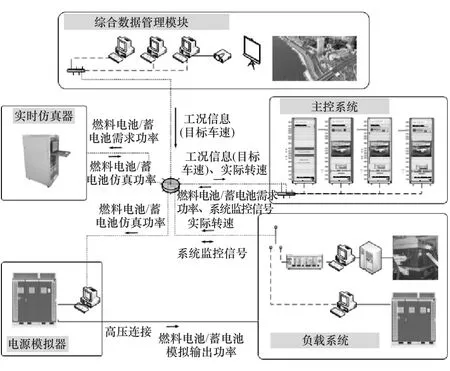
图3 燃料电池模型测试验证示意图
主控系统调用数据库中的工况信息,由主控系统的整车模块计算行驶阻力。根据行驶阻力,由电驱动模型提出功率要求,并由燃料电池发动机模型给出功率响应,并发往电源模拟器。电源模拟器根据燃料电池发动机模型的输出特性,产生模拟燃料电池发动机的电压信号,该部分产生的能量由负载系统消耗。若负载系统为电机 测功机系统,则输出实时转速信号,由驾驶员模型根据期望车速和实际车速的差值调整电机转矩。利用此类架构,可实现燃料电池模型的测试验证,特别是燃料电池汽车动力系统的匹配测试,即在燃料电池缺失的情况下,利用模型与电源模拟器构成完整的动力系统。
与全仿真和纯实物测试相比,使用模型在环的测试方法,可完成测试链中部分测试设备实体缺失情况下的测试验证;在此过程中,可充分利用现有测试设备,将被测模型的输出信号输入相关测试设备中,实现模型信号的实时动态检测。
4.2 Software in the Loop(软件在环)
Software in the Loop的被测对象为代码,组成环的其他部分为硬件或软件。本测试平台的实时仿真器配置有软件在环平台,可实现代码验证。
当被测对象为系统控制策略时,将系统控制策略生成代码,利用软件在环平台,与动力系统模型连接,实现策略验证功能,如图4所示。当被测对象为系统控制策略和动力系统模型时,可将系统控制策略与动力系统模型均生成代码,利用软件在环平台进行验证。当被测对象为动力系统关键部件控制策略时(如电驱动系统),则将该部分控制策略生成代码,其他部分仍为模型。
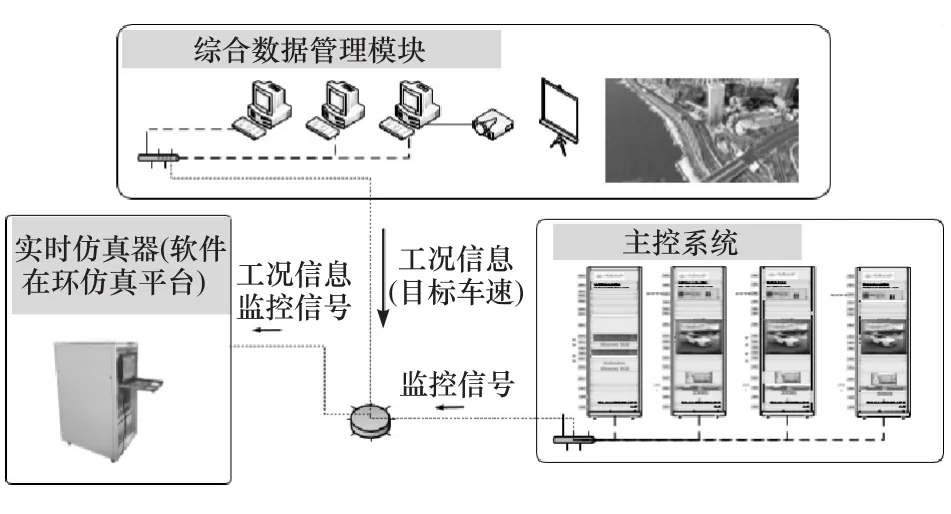
图4 系统控制策略验证示意图
软件在环测试可进一步实现模型的测试验证,使待测模型所生成的代码可应用于硬件。软件在环测试实例中,代码和模型均运行在实时仿真器中,在虚拟实时环境中将生成的C代码用于控制部件模型,实现软件在环平台与Simulink仿真平台的联合仿真,借助实时仿真,改进和测试控制策略。
在X in the Loop方法指导下的软件在环,可将代码验证平台与动力系统测试设备连接,将被测代码的输出信号输入相关测试设备中,实现实时动态检测。由于实验条件所限,基于该仪器测试平台的软件在环场景局限于包含被测代码 模型和被测代码 模型代码两类场景。
4.3 Hardware in the Loop(硬件在环)
Hardware in the Loop的被测对象为硬件,组成测试环的其他部分为硬件或软件。在本测试平台上,由于测试手段的软硬件组合方式灵活,故可完成多种硬件在环测试验证。
当被测对象为燃料电池发动机或动力蓄电池,即动力源部件时,可调用电源模拟器充当负载,或使用真实的电驱动系统充当负载。当被测对象为电驱动系统时,可利用真实的燃料电池发动机或动力蓄电池,或调用电源模拟器,作为动力源。测试所需其他部件可使用模型或实物。当被测对象为控制器时,该测试场景符合传统意义上的硬件在环,除控制器为实体,其他部分均为模型。
图5为基于该测试平台应用的一种硬件在环典型场景,即利用实时仿真器、电源模拟器和测功机等硬件和燃料电池模型/蓄电池模型等模型来实现电驱动系统的匹配与性能测试。
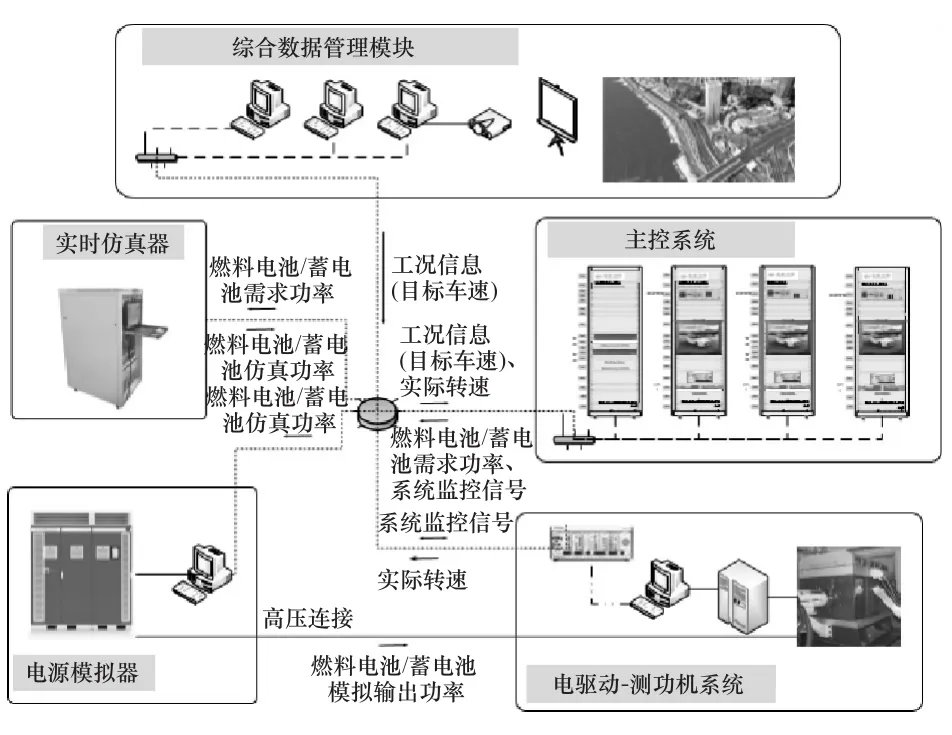
图5 硬件在环 电驱动系统匹配与性能测试示意图
在该类场景下,主控系统从综合数据管理模块调用工况信息,并利用系统控制策略模块和整车模块求得燃料电池发动机和蓄电池的需求功率,电源模拟器根据燃料电池发动机模型和动力蓄电池模型并联后的特性产生电流电压信号,并为电驱动系统提供能量,电驱动系统工作并拖动测功机。利用此类架构可在动力源部件缺失的情况下,实现燃料电池汽车动力系统电驱动部分的匹配与性能测试。
在X in the Loop方法中,硬件在环的定义由硬件仅指代控制器扩展为硬件指代被测对象,测试链中的其他部分可以为真实对象,也可用模型代替。因此利用X in the Loop方法可构建灵活的硬件在环测试系统,实现动力系统关键部件的匹配和性能测试。
5 X in the Loop应用实例
根据X in the Loop测试验证方法的研究现状和动力系统测试验证的特点,基于已有设备设计了一套利用X in the Loop方法实现动力系统测试验证的架构。
5.1 系统配置
该架构的组成如图6所示。在该架构中,被测对象为电机,组成测试环的其他部分为综合数据管理模块(包括驾驶模拟器)、计算机、测功机和辅助系统等。其中,综合数据管理模块与驾驶模拟器相连,提供工况信息。计算机集成了整车模型和信号处理模块,用以调用工况信息和处理接收到的信号。电机 测功机系统由两个对拖电机组成,其中一个为被测电机,另一个为负载电机,被测电机的参数如表2所示。
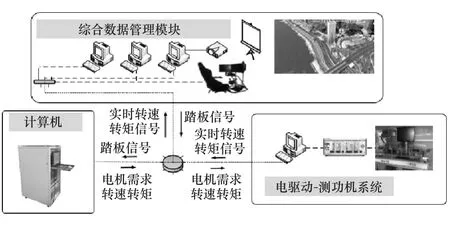
图6 基于X in the Loop方法动力系统测试验证架构
5.2 测试过程说明
综合数据管理模块提供工况信息数据,由驾驶员操纵驾驶模拟器的加速踏板和制动踏板,踏板信号再上传至综合数据管理模块,计算机的整车模型和电机模型调用踏板信号,通过计算得到电机需求转速转矩,将转速转矩信号发送至驱动电机 负载电机一体化系统,该系统将实际转速转矩信息返回给综合数据管理模块,驾驶员根据实时转速信息调整踏板行程,由驾驶员实时操纵驾驶模拟器,从而实现速度跟随。
5.3 测试结果
图7为该架构下的电机测试结果。由图7可知,在X in the Loop方法中,该电机能基本满足测试需求。
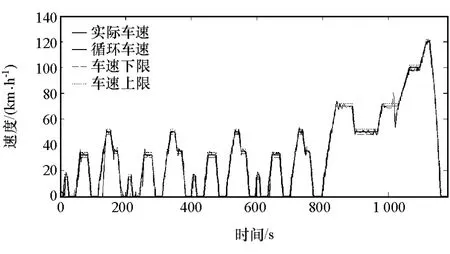
图7 测试结果
6 结论
基于燃料电池汽车动力系统测试的现状,针对现有测试平台的局限性和无法实现软硬件结合测试的特点,引入X in the Loop开发测试验证方法,并基于该方法开发了一套燃料电池汽车动力系统动态性能综合测试平台,可实现模型在环、软件在环和硬件在环等针对不同类型测试对象的匹配和性能测试。利用X in the Loop方法和测试平台进行燃料电池汽车动力系统及其关键部件的开发测试,可明显提高测试验证的效率,缩短时间,降低成本,为燃料电池汽车系统开发提供了关键性的技术支持,具有广阔应用前景。
[1] CORBO P,CORCIONE F E,MIGLIARDINI F,et al.Experimental assessment of energy-management strategies in fuel-cell propulsion systems[J].Journal of Power Sources,2006,157(2):799-808.
[2] THOUNTHONG P, RAËL S, DAVAT B.Control strategy of fuel cell/supercapacitors hybrid power sources for electric vehicle[J].Journal of Power Sources,2006,158(1):806-814.
[3] VURAL B,BOYNUEGRI A R,NAKIR I,et al.Fuel cell and ultra-capacitor hybridization:a prototype test bench based analysis of different energy management strategies for vehicular applications[J].International Journal of Hydrogen Energy,2010,35(20):11161-11171.
[4] SALAH M,MALLOUH M A,YOUSSEF M,et al.Hybrid vehicular fuel cell/battery powertrain test bench:design, construction,and performance testing[J].Transactions of the Institute of Measurement& Control,2016,39(9):1431-1440.
[5] ERICKSON T.借助NI LabVIEW和CompactRIO控制世界上最大的燃料电池混合动力机车[EB/OL].http://sine.ni.com/cs/app/doc/p/id/cs-15579#,2016-12-11/1016-12-13.
[6] 福特公司使用NI VeriStand和INERTIA附件部署燃料电池测试系统[EB/OL].http://sine.ni.com/cs/app/doc/p/id/cs-15071#,2016-12-11/2016-12-13.
[7] 谢长君,全书海,张琴,等.燃料电池混合电动汽车动力系统综合测试平台及测试方法:CN102494898A[P].2012.
[8] 张冰战,赵韩,张炳力,等.超级电容与燃料电池发动机混合动力系统测试研究[J].汽车技术,2008(4):44-47.
[9] 刘振.轮毂电机驱动系统与燃料电池电动汽车的动力匹配[D].长春:吉林大学,2015.
[10] 金振华,欧阳明高,卢青春,等.燃料电池动力系统仿真及实时控制平台开发[J].中国机械工程,2008,19(15):1879-1882.
[11] 杨挺.燃料电池汽车DC/DC变换器的虚拟仪器测试系统研究[D].上海:同济大学,2008.
[12] ALBERS A,DÜSER T.A new process for configuration and application of complex validation environments using the example of vehicle-in-the-Loop at the roller test bench[C].ASME 2010 International Mechanical Engineering Congress and Exposition,2010:807-816.
[13] ALBERS A, DÜSER T.Implementation of a vehicle-in-the-Loop development and validation platform[C].FISITA World Automotive Congress,2010.
[14] ALBERS A,YOU Y,KLINGLER S,et al.A new validation concept for globally distributed multidisciplinary product development[C].Proceedings of 20th International Conference on Industrial Engineering and Engineering Management,Springer Berlin Heidelberg,2013:231-242.
[15] 章桐,左曙光,许思传,等.用于燃料电池汽车动力系统的动态性能测试系统:CN103207084A[P].2013.