合流区竞争与协作换道判定方法与特性研究
2018-02-28东野长梅石建军
东野长梅,石建军
(北京工业大学 北京市交通工程重点实验室,北京 100124)
0 引言
近年来,城市快速路系统发展迅速,小汽车保有量急剧增加。尤其在大城市的早、晚高峰时段,城市道路资源极其紧张,你争我抢、加塞挤压的竞争驾驶行为屡见不鲜。换道行为是车辆驾驶过程中最常见的行为之一,对道路通行能力和交通安全都有显著影响[1-2],研究道路资源有限条件下车辆间的竞争与协作换道行为,不仅对提高道路通行能力和减少交通事故具有重要意义,也可为换道辅助系统和车路协同提供理论支撑。
大多数研究基于换道意图将换道行为划分为自主型换道(Discretionary Lane-change,DLC)和强制型换道(Mandatory Lane-change,MLC)[3-4],对建模方法(如基于规则型、离散型换道模型以及基于博弈论等换道模型)关注较多。不同换道行为表现出不同的行为特性,构建车辆换道行为模型首先需要对车辆换道类型进行判定。为更加细致地构建换道行为模型,国内外学者基于换道车辆和后随车之间的交互行为,将换道行为进一步划分为自由换道、强迫/竞争换道和协作换道,并通常基于车辆间距和速度变化来辨别竞争/强迫行为和协作行为。如国外学者Hidas[5]在判别换道类型时,主要根据车辆换道过程中的间距变化,认为换道过程中间距先减小后变大为强迫换道,间距先变大后减小则为协作换道。Wang[6]未考虑强迫换道行为,根据后随车换道让行或减速礼让行为将协作换道模型细分为协同换道子模型和礼让减速子模型。Sun等[7]根据换道车辆是否提前开启转向灯和后随车减速行为发生的时刻,将换道类型细分为强迫换道、竞争/协作换道、自由换道。相比国外,国内驾驶环境更加复杂,冒险型、竞争型换道行为也更频繁、多样。孙剑等[8]根据交通流水平,将交织区换道分为自由换道和协作换道进行研究,在协作换道中分析了后随车的减速意愿及可行性,若可行则视为协作换道发生,否则需要引入换道“协商”机制。Zhao等[9]通过实地观察国内的换道行为发现了一种特殊的竞争型换道行为:基于多次决策的多步挤压换道(Multistep Approaching Lane Changing,MALC),该行为的主要特征为换道车辆减速幅度较大,骑线行驶时间较长,换道过程中多次尝试插入后随车间隙。党睿娜等[10]在高速公路上进行了实车驾驶人换道实验,研究了换道过程中的车辆、车间状态变化和换道操作习惯,但其实验是在车辆密度较小的交通流进行的,属于自由换道研究。谭云龙[11]结合行为发起者和换道车辆与后随车的速度是否均减小两个条件,定义了强迫换道与协作换道。其他大多数研究都是基于后随车对换道请求的响应行为来辨别竞争换道与协作换道:换道车辆发出换道请求,若后随车主动减速则为协作换道;若后随车不减速、换道车依然坚持换道从而后随车被迫减速的行为,则为竞争换道[12-13]。
综上所述,竞争换道行为已引起广泛关注,但关于竞争换道与协作换道的判定标准研究较为欠缺,现有研究多从定性角度描述间距、速度的变化趋势,判定规则单一,观测时间节点也较为模糊,缺乏定量、系统的分类方法。因此,本文在已有换道分类方法的基础上,充分考虑车辆间的交互行为特点,提出一个定量辨别竞争与协作换道行为的判定标准。首先,系统地提出了竞争换道与协作换道行为的定量判定方法;然后,设计实验验证上述判定方法的有效性;最后,分析了竞争换道与协作换道的外显运动特征,并量化了竞争换道与协作换道的发生概率与接受间距的变化关系。
1 竞争与协作换道行为判定方法
通过观察换道过程中换道车辆与后随车的交互行为,将合流区换道行为划分为自由换道、协作换道和竞争换道,本文重点研究竞争与协作换道行为。
(1)协作换道行为:换道条件不充分(主要表现为换道间距小于临界接受间距),换道车辆向目标车道微调车头,后随车主动调节速度保证与换道车辆之间的安全距离,整个交互过程发生在换道车辆进入目标车道前,之后换道车辆开始继续向目标车道驶入。
(2)竞争换道行为:根据竞争行为的发起者,一般有两种表现。一是换道车辆为竞争行为的主导者,在换道条件不充分的条件下,持续逼近目标车道,最终骑线与前导车并行,从而强迫后随车减速、增大换道间距;二是后随车为竞争行为的主导者,换道车辆保持一定转角表达自己的换道意图,后随车加速或保持原速跟进前导车,换道车辆等待一段时间后仍未获得接受间距,开始驶入目标车道,此时后随车为避免碰撞、刮蹭等而骤然减速。
为更好地描述换道行为,构建一般换道行为的交通场景图(见图1)。其中,VehS为换道车辆,VehF为后随车,VehL为前导车。由于合流区换道行为属于出行需求诱导下的换道[14],一般与本车道上的前车或后车的车辆类型、运行状态等无关,故本文不考虑本车道上前、后车辆对竞争与协作行为的影响。

图1 合流区换道行为示意图
对于较明显的竞争与协作行为,结合速度和间距两个指标可直观地进行判断,但有些换道行为单通过速度、间距的变化很难确定。比如:换道车辆发出换道请求后,后随车速度略微减小甚至不减小,但两车速度均较小且后车间距较大的情况,按照速度变化来看,显然属于竞争行为。但实际上后随车没有减速的必要,换道车辆可跟随前导车平缓驶入目标车道。所以本文引入车头时距和碰撞时间指标,依次通过接受间距、车头时距和碰撞时间来判定复杂环境下的竞争与协作换道行为类型。
结合实际数据的多种可能性,本文给出较为完整的竞争与协作换道行为判定方法(Identify Method of Lane-Changing,IMLC),具体判断流程见图2。其中需要提取的判定参数包括:①换道接受总间距GAPT(m)及后随车间距GAPf(m);②换道车辆和后随车的速度vs和v(fkm/h);③换道车辆与后随车的碰撞时间(s);④换道车辆的车长Ls(m)。

图2 换道行为类型判定流程图
第一步:判断目标车道上的前、后车总间距是否大于自由换道的最小接受间距阈值。研究表明,城市道路环境中,安全车头时距处于2~4s之间,大于4s后车辆处于自由流状态[15-16]。换道车辆与后随车博弈较为激烈时,其极度靠近目标车道线,随时有碰撞危险,故本文将前导车与换道车、换道车与后随车的车头时距计入总接受间距阈值的计算,取最小车头时距为2s,则总接受间距阈值GAPT0=Ls+2vs+2vf。若当前间距大于总接受间距阈值,则判定为自由换道行为,否则继续判断后随车间距;若当前间距大于后随车间距阈值GAPf0=2vf,仍判定为自由换道,否则进行下一步判定。
第二步:GAPf越小,换道车辆的换道意图越不容易被提前察觉,所以需要跨道前后较短时间内的数据。本文规定当GAPf=(0,vf]时,提取跨道时刻前、后1s时刻的数据;当GAPf=(vf,2vf]时,提取跨道时刻前、后2s的数据。然后,计算跨道前、跨道时、跨道后3个时刻的数据值,为去除噪声数据,取每个时刻前后0.5s的数据平均值作为该时刻的值,并规定GAPf变化量的绝对差值在0.1vf以内,都视作无变化。在拥挤交通环境中,依据跨道前、跨道后的GAPf变化情况,可知跨道前GAPf有不变、变大和变小3种可能性;同理,跨道后GAPf也有不变、变大、变小3种可能性。各种可能性的组合结果及判定规则如图3所示。

图3 基于后随车间距的竞争与协作换道行为判定规则
图3(a)中,跨道前GAPf无明显变化,说明后随车有轻微的竞争意识,换道后GAPf不变或减小,需要根据换道车辆与后随车之间的碰撞时间进一步判定换道行为类型;图3(b)中,跨道前GAPf变大,说明后随车有协作意识,但GAPf先增后减,有可能是换道车辆通过加速暂时牺牲前导车间距,之后后随车加速靠近的结果,所以不能排除竞争换道的可能性;图3(c)中,跨道前GAPf变小,说明后随车有竞争意识,但同理,GAPf先减小后增大或不变,有可能是换道车辆通过减速暂时牺牲后随车间距,之后后随车减速协作的结果,所以不能排除协作换道的可能性,需要结合碰撞时间进一步判断。
第三步:对于图3中需要进一步判定的case②,case③,case⑥,case⑦,case⑧,case⑨,可根据换道车辆与后随车的碰撞时间的倒数进行判定,判定方法如表1所示。大量调查表明,碰撞时间(Time-to-Collision,TTC)的安全阈值为[2,4]s,本文取最小安全阈值,则TTC-1=0.5。

表1 自由、竞争与协作换道行为判定
2 数据获取与实验设计
2.1 数据获取
调查前采用电子地图线上选点与实地勘察线下踩点相结合的方式,最终选定几何特征相似的北京市长虹桥和肖村桥合流区作为研究对象,这两处合流区均为平行式加速车道,且加速车道长度相近,具体路况如图4所示。为使所采集的数据能反映拥挤交通流的基本特性,调查时间选择包含早晚高峰时段的3个普通工作日。拍摄视频时,将摄像机架设在高3.5m的人行天桥上并将安有广角镜头的摄像头固定在4m长的伸缩杆顶端,尽量做到垂直拍摄,视频坐标标定误差限制在0.1m以内,拍摄时长共计9h。然后,通过视频处理软件Format Factory将视频处理成10帧/s的AVI格式的视频图像,再利用车辆轨迹提取软件George通过视频导入、特征点坐标标定及矫正、车辆轨迹点选、数据导出等步骤,最终可获得相应时刻的车辆位置、速度、加速度、曲率等数据。

图4 快速路合流区调查地点
2.2 实验设计
随机选择5名非职业驾驶员,首先为之讲解竞争与协作换道的含义以及从定性角度判定竞争与协作行为的方法,然后为他们回放换道行为数据对应的视频片段。观看过程中,观察者根据换道开始到跨道发生前这段决策时间的视频,观察换道车辆和后随车的车辆行为,并结合速度、间距变化,从主观上给出竞争或协作的判断结果。为保证评判结果的客观性,每名观察者需要独立作出判断,每个样本若有3人以上(含3人)的结果保持一致,则该样本类型取此结果,否则将对该样本进行单独标记。
最终,通过人工法成功判定出79组样本量的换道行为类型,竞争换道与协作换道分别为32组和47组。然后,基于MATLAB对IMLC编程,对以上79组样本的换道类型进行自动识别。对比两者结果发现,人工组与算法组的换道行为类型平均匹配率高达87%。其余由人工未能有效分辨出换道类型的样本,也通过IMLC得到了有效甄别,综合IMLC的两次判定结果,竞争换道与协作换道分别为79组和128组,具体判定结果如表2所示。

表2 人工法与IMLC法换道行为类型判定结果
结果分析:通过判定较为直观的换道行为,所得人工评判和算法评判结果的平均匹配率为87%,可证明所述方法有效。最终,通过IMLC可有效识别竞争与协作行为的模糊性,明确其他的复杂换道行为类型。
3 竞争与协作换道行为特征分析
为明确竞争与协作换道行为特征,首先需对换道行为关键点进行定义,然后对换道行为主要特性进行统计分析。图1中,A、D点表示换道行为的起点和终点,A(D)点指车辆跨道开始前(完成后),车辆横向位移值不大于上游(下游)相邻1s内的任一时刻的值;B、C点分别表示跨道开始时刻和跨道完成时刻。则BC阶段为骑线行驶过程,AD阶段为完整换道过程,两者对应时间分别为骑线行驶时间和换道时间。
3.1 接受间距与相对速度关系
图5为相对速度与接受间距的关系图,图中实线为协作换道的拟合曲线,虚线为竞争换道的拟合曲线,可见竞争与协作换道行为中:①在一定的相对速度范围内,接受间距均随相对速度增大而增大;②同一相对速度条件下,后随车间距整体大于前导车间距,说明在换道过程中,由于后随车间距不受换道车辆自身控制,故对其换道成败更为关键。
另外,对相对速度与接受间距进行回归分析,发现在同一相对速度条件下,竞争换道行为的接受间距较小,尤其当前车相对速度小于5km/h时,竞争换道的前导车间距出现大量负值,表示换道车辆部分车身与前导车相重合,这种情况显然不具备换道条件。这说明为逼迫后随车减速,换道车辆在实施换道前很长一段时间就开始骑线与前导车并行,充分展现了抢占资源时“你争我挤”的激烈性。
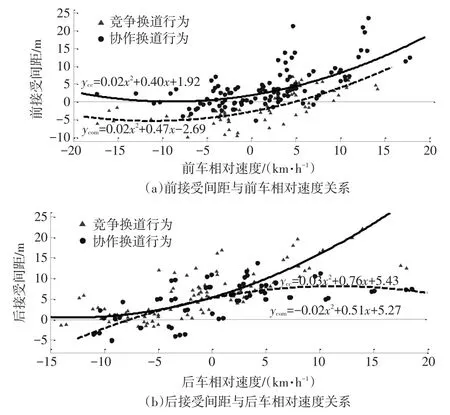
图5 换道行为相对速度与接受间距关系图
3.2 骑线行驶时间
目前,关于换道起始节点的定义无统一规定且比较模糊,这使得换道时间在统计值上相差很大。为减少异议,本文选取骑线行驶时间作为竞争与协作换道行为的特征指标之一,其分布图及累积频率曲线如图6所示,其中,五角星标志与菱形标志的折线分别代表竞争换道与协作换道的累积频率曲线。

图6 骑线行驶时间分布图
协作换道行为的骑线行驶时间集中在2~6s,10s以上的换道行为仅占3%左右,均值为4.8s;竞争换道行为中,骑线行驶时间较为分散,4s以下的仅占15%左右,10s以上则占到30%,均值为7.9s。这说明在竞争换道行为中,换道车辆为表明换道的坚决性,会骑线向目标车辆加压,直至出现可接受间距。
3.3 目标后车速度
换道过程中受影响最大的一般为后随车辆,其最大速度变化值可反映换道过程的平稳性,计算公式如下:

目标后车速度变化最大值雷达图见图7。由图7可知,竞争与协作换道行为均会对目标后车的运行速度产生一定影响,但竞争换道行为的影响要大于协作换道行为,具体表现为:两行为中,后随车的最大速度变化值均集中于5~10km/h;但协作换道行为中,后随车的最大速度变化值在5km/h以内的比例明显高于竞争换道行为。

图7 目标后车速度变化最大值雷达图
3.4 加加速度(Jerk)
研究表明,激进驾驶行为的Jerk值高于一般驾驶行为[17]。车辆舒适行驶状态下的Jerk值在2m/s3以内,超过3m/s3后则会对行车舒适性和交通稳定性产生较大的负面影响[18]。对后随车和换道车辆在AC段中Jerk值大于3m/s3的频率进行统计分析,如图8所示。

图8 后随车Jerk值大于3m/s3所占换道时间比例分布图
在协作换道中,后随车的Jerk值大于3m/s3所占换道时间比例在0.4以下的占70%,竞争换道中这一比例约为50%;Jerk值大于3m/s3所占换道时间比例超过0.8的情况在协作换道行为中未出现,竞争换道中这一比例则达到了12%。由此可知,相比竞争换道,协作换道中后随车的加速度变化率较小,其大部分时间处于舒适安全状态,对交通流运行的负面影响较小。
3.5 接受间距分布
图9为竞争与协作换道行为的接受间距分布和累积频率图,其中平滑曲线代表接受间距的分布趋势,折线代表其累积频率。由图9可知,竞争与协作换道行为的接受间距存在一定差异。竞争换道的总接受间距集中在5~10m,平均值为7.6m,接受间距在0~5m之间的占到24%,大于15m的接受间距不足5%;协作换道行为的接受间距集中在10~15m,平均值为13.3m,在0~5m之间的接受间距仅占5%左右,大于15m的则占到30%。
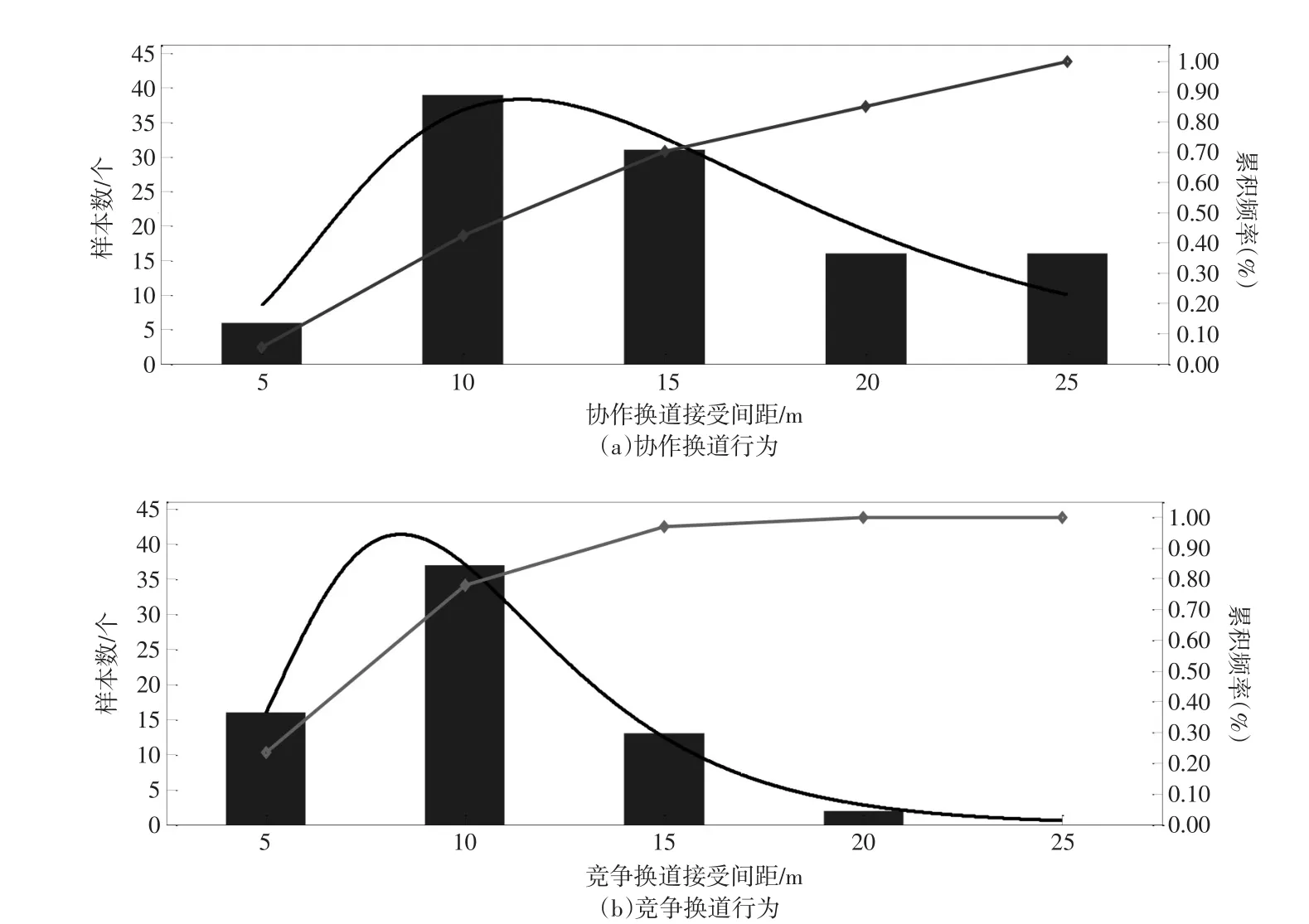
图9 车辆换道接受间距分布和累积频率
对竞争与协作换道行为的接受间距进行单样本K-S检验,结果显示两种行为的接受间距均服从正态分布。通过数据拟合得到:协作换道行为中,接受间距服从G(12.77,6.17)的正态分布;竞争换道行为中,接受间距服从G(9.74,3.66)的正态分布,据此得到竞争与协作换道行为的概率密度如式(2)、式(3)所示:
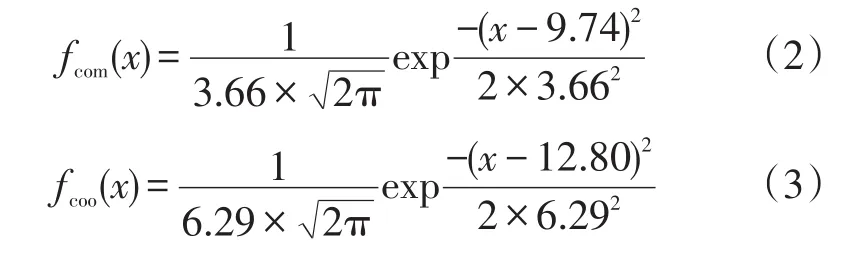
则竞争与协作换道概率如式(4)、式(5)所示:

式(2)~式(5)中:fcom(x)为竞争换道行为密度函数;fcoo(x)为协作换道行为密度函数;x为换道行为接受间距(m);Pcom(x)和Pcoo(x)分别为竞争换道概率与协作换道概率。
基于式(4)和式(5)得到不同接受间距下的换道行为选择概率值,如表3所示。
观察表3发现:竞争或协作换道概率并非随间距增大而单调增大,而是在临界值8m处出现转折;当间距小于8m时,竞争换道的概率随间距增大而增大。这可以解释为当间距较小时,驾驶员意识到竞争对换道行为并无帮助,故协作意识反而较高。整体来看,当间距小于14m时,换道车辆采取竞争行为的概率较大;当间距大于16m时,换道车辆采取协作行为的概率明显增大;当间距大于22m时,换道车辆基本可以通过协作顺畅完成换道行为。

表3 不同间距下的换道行为概率
4 结论
本文在实地观测和已有研究基础上,结合接受间距、车头时距和碰撞时间,系统地总结出一套定量判定竞争换道与协作换道的方法,并与人工判定结果相对比,验证了该方法的有效性。对比分析竞争与协作换道的行为特性,发现竞争换道中,换道车辆骑线压迫后车减速行为较频繁,后车运行状态波动较大、接受间距较小,主要表现如下:
(1)骑线行驶时间:竞争换道骑线时间均值为7.9s,是协作换道的1.6倍;
(2)后随车最大速度变化值:竞争换道中速度变化值分布范围较大,且20%的竞争换道中,后随车速度变化在15km/h以上;Jerk值大于3m/s3的时间比例在0.6以上接近20%,协作换道中该比例不足10%;
(3)正态分布能较好地拟合竞争与协作换道的接受间距,且当间距值小于8m时,竞争换道概率随间距增大而增大;当间距值大于20m后,竞争换道的概率不足10%。
车辆换道行为受交通流、车辆性能以及驾驶员特征等多种因素影响,本文仅考虑了拥挤状态下的接受间距与换道行为的概率关系,在今后研究中将会全面考虑以上因素。另外,汽车的智能化、网联化已成为全球汽车产业的发展重点,研究应进一步考虑智能网联环境下的竞争与协作换道行为特性并构建相应模型[19-20]。