基于模糊自适应PID控制的温室大棚控制策略研究
2018-02-28刘亚伟
刘亚伟,薛 鹏
(长春工业大学 电气与电子工程学院,吉林 长春 130022)
随着国家城镇化的发展和农业产量的提高,中国已成为一个农业大国,而农耕方式也逐渐由小规模种植向大规模方式变化[1]。因此,需要利用智能化控制方式来改善温室大棚对农作物的控制。温室大棚是一个具有大惯性、非线性、时滞性等特点的控制系统[2],内部环境与多种因素有关,本文主要针对温度因素进行控制研究。
传统PID控制器结构简单,易于操作,控制效果较好,因此在很多方面得到了较为广泛的应用[3]。由于影响温室环境的因素较多,本文针对温室温度控制系统提出模糊自适应PID控制算法,使温度保持在稳定状态,从而满足温室大棚控制要求,使温室大棚控制实现智能化。
1 温室大棚温度建模
根据温室环境控制的特点,为了实现对控制算法的研究,本文采用了温室实验箱作为模拟对象来建立数学模型并简化出了相应的传递函数,其建模过程如下。
本模型是根据能量守恒定理得出来的,实验箱内存储的能量的变化量等于在单位时间内实验箱内的流入能量和流出能量的差,则有如下公式:

式(1)中:C为实验箱的比热容,KJ/K;Ti为实验箱体内被控温度,K;TO为实验箱附近的环境温度,K;B为实验箱体内的传热系数,KJ/sm2K;Q为单位时间内电阻丝产生的热量,KJ/s;S为实验箱传热面积,m2。
上式中左边为实验箱内单位时间能量的变化量,右边是单位时间内流入实验箱的能量Q减去单位时间内流出实验箱的能量BS(Ti-TO).因此可将式(1)变为:

此时得到的即实验箱的数学模型。
如果实验箱处于稳定的状态,实验箱体内的温度Ti与通过电阻丝所发出的热量Q都达到稳定状态,则有如下式子:
实验箱处于加热的过程中时,则有如下式子:

将式子(3)和(4)代入(2)中,则有公式:

化量ΔT与控制ΔQ之间的传递函数为:

其中,K为实验箱的比例系数,T为时间常数。
温室的控制模型可以近似由上式(6)加上一个时滞环节,则有传递函数[4]:

式(7)中:K为增益系数;T为时间常数;τ为纯滞后时间常数。
选用MATLAB为仿真工具,对模糊自适应PID控制器进行仿真,并与常规PID控制器进行比较,验证其控制效果。
2 模糊自适应PID控制算法
2.1 PID控制
工程实际中,应用最为广泛的调节器控制规律为比例、积分、微分控制,简称PID控制。PID控制是偏差比例P、偏差积分I、偏差微分D控制的简称。其PID控制算法为:

设r(t)为系统的设定值,y(t)为系统真实测得的值,e(t)是系统设定值与系统实测值的偏差,即e(t)=r(t)-y(t),作为PID控制器的输入。
2.2 模糊自适应PID控制
模糊自适应PID控制器是应用模糊数学的基本理论和方法,把控制规则的条件用模糊集来表示,并把这些模糊控制规则及有关信息作为知识存入到系统知识库,然后根据控制系统的实际情况,运用模糊推理,实现对PID参数的自动调整。由于温室环境是一个非常复杂的被控对象,从理论上讲,将温室内越多的环境因子作为模糊控制器的输入量,其控制效果越好。但随着模糊控制器输入量的增多,模糊控制器的设计也越来越复杂,而模糊规则的制订十分困难[5]。本文结合温室大棚控制系统的特点,选用二维输入的模糊控制器对PID参数进行在线调整,其模糊自适应PID控制器结构图如图1所示。
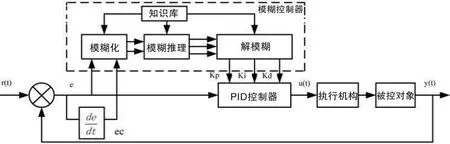
图1 模糊自适应PID控制器结构图
其中,系统设定值r(t)为温度设定值,e和ec分别表示为温度偏差量和偏差变化率,而模糊控制器的输出变量KP,KI,KD为PID控制器的3个参数变量,控制器输出量为u(t),其主要为控制执行机构的变量。y(t)就是调整后的温室实际值。
对温室大棚中温度进行控制策略模糊化时,选取温度偏差e和偏差变化率ec的模糊论域范围均为[-4,4],输入量E、EC的模糊集合为{NB(负大),NS(负小),Z(零),PS(正小),PB(正大)},则各等级对应的取值为-4,-2,0,2,4.而模糊推理出的变化量参数Δkp,Δki,Δkd的论域、等级均与E一样。其中,隶属函数均选择三角型隶属函数,则输入变量、输出变量的隶属度函数曲线均如图2所示。
由图2模糊控制系统结构可以看出,此系统是以偏差e和偏差变化率ec为输入语言变量,以KP,KI,KD为输出语言变量的二输入三输出的模糊控制器。用偏差和偏差变化量完全可以表述整个系统的响应过程。针对不同的偏差e和偏差变化率ec,对PID控制参数KP,KI,KD的要求不同,则模糊规则如下:①当∣e(t)∣较大时,为加快系统的响应速度,应取较大的KP,这样可以使系统的时间常数和阻尼系数减小。当然不得过大,否则会导致系统不稳定。为避免系统在开始时可能引起的超范围控制作用,应取较小的KD,以便加快系统响应。为避免出现较大的超调,可去掉积分作用,取KI等于0.②当∣e(t)∣处于中等大小时,应取较小的KP,使系统响应的超调略小一点。此时,KD的取值对系统较为关键,为保证系统的响应速度,KD的取值要恰当。此时,可适当增加一点KI,但不得过大。③当∣e(t)∣较小时,为使系统具有良好的稳态性能,可取较大的KP和KI;为避免系统在平衡点出现震荡,KD的取值应恰当。

图2 输入、输出变量隶属度函数曲线
3 仿真实验
根据温室控制的特点,本文针对于温度进行控制策略研究,根据上述建立的温室模型,即传递函数为公式(7)。
由数据分析结果可以看出,利用阶跃响应曲线辨识的方法,通过辨识可以得到系统的模型参数为:τ=2.5 s,k=15,T=10 s。确定KP,KI,KD的初始值分别为1.6,0.15,0.9.利用模糊自适应PID参数之间的在线调整,进行仿真实验,则实验结果如图3所示。
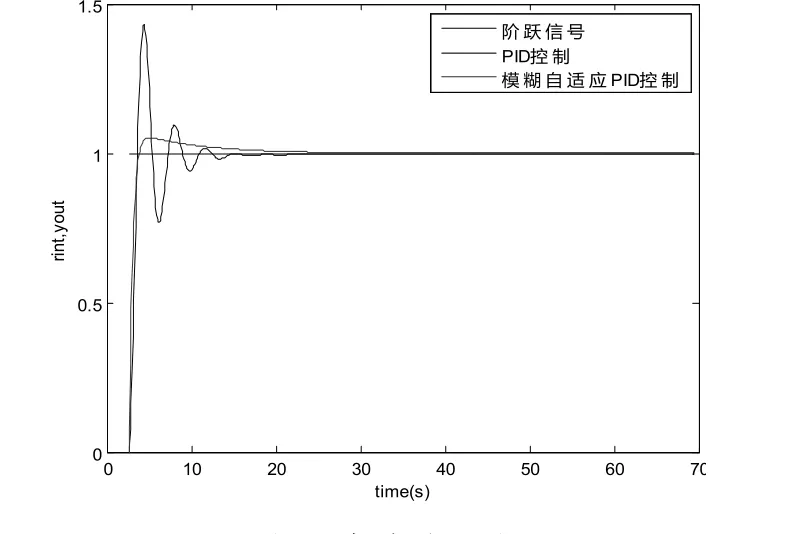
图3 实验对比图
由图3所示,在PID控制算法模式下,上升时间tp为6.8 s,调整时间ts为15.8 s,超调σ%为42%.在模糊自适应PID控制算法模式下,上升时间tp为6.6 s,调整时间ts为13.4 s,超调σ%为12%.由实验结果的对比分析可以看出,模糊自适应PID控制算法的调整时间较短,超调量较低,动态性能良好,能够使系统保持在稳定状态,满足系统控制要求。
4 结论
针对温室大棚控制系统的非线性、滞后性等特征,采用模糊自适应PID控制算法对温室大棚中的温度进行控制。模糊自适应PID控制策略能够根据模糊规则及自身的自适应性在线调整PID参数大小,系统的动态性能良好,调整时间短,能够满足系统的稳定性要求。
[1]廖建尚.基于物联网的温室大棚环境监控系统设计方法[J].农业工程学报,2016,32(11):233-243.
[2]刘红义,赵方,李朝晖,等.一种基于中间件的温室远程监测系统的设计与实现[J].微电子学与计算机,2010,27(8):190-193.
[3]暴翔,何小刚.基于模糊PID控制器的等速采用系统[J].煤炭技术,2017(6):273-275.
[4]肖世海.基于ARM的温湿度控制器的设计[D].杭州:浙江大学,2007.
[5]战美,刘春红,位耀光,等.基于模糊控制的温室温湿度无线智能监控系统[J].农业工程,2013,3(3):47-50.
